Ziegler-Nichols整定法适用对象为带纯延迟的一阶惯性环节,即G(s)=K*e^(-τs)/(Ts+1)
其中,K为比例系数;T为惯性时间常数;τ为纯延迟时间常数。
当被控对象的单位阶跃响应曲线看起来近似一条S形曲线时,可用Ziegler-Nichols经验整定公式。
下图(1)为被控对象的阶跃响应曲线中比例系数、惯性常数、纯延迟时间常数
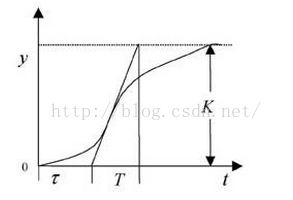
(1)
下表(2)为PID参数的Ziegler-Nichols经验整定公式:
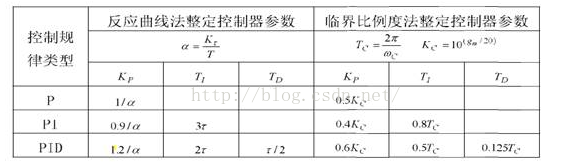
(2)
对于G(s)=25/(s^2+7s+25),采用Ziegler-Nichols进行PID参数经验整定,步骤如下:
(1)求被控对象的单位阶跃响应,观察阶跃响应曲线是否可以近似为一条S形曲线,如果可以近似为S形曲线则能够采用Ziegler-Nichols进行参数整定,否则无法使用该方法。下图(3)为G(s)=25/(s^2+7s+25)的单位阶跃响应:
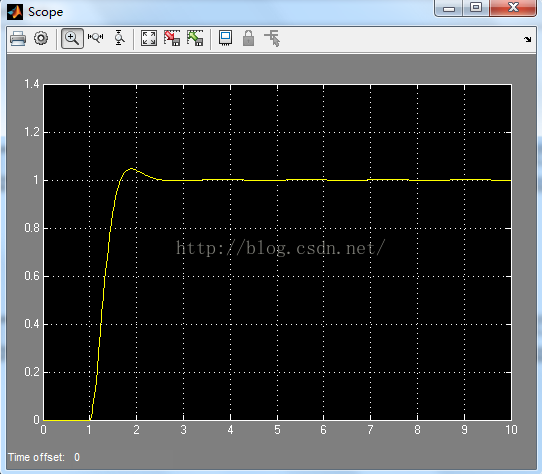
(3)
由此可知,该阶跃响应曲线近似S形曲线。因此,对于G(s)=25/(s^2+7s+25),可以采用Ziegler-Nichols PID参数经验整定法。
(2) 根据被控对象阶跃响应,求取比例系数K、惯性常数T及纯时间延迟常数τ:
对于比例系数K,它为被控对象阶跃响应稳定后的幅值,本例中可知K=1;
对于惯性常数T及纯时间延迟常数τ则需要根据图(1)所示各自的含义求取,纯时间延迟常数τ即为曲线的拐点的切线在X轴上的交点,惯性常数T即为曲线的拐点处的切线在幅值为K时对应的X轴的坐标减去纯时间延迟常数τ,在本例中可得到T=0.506,τ=0.065;
(3) 根据经验整定公式表求取PID初始参数KP、KI、KD:
KP=1.2*T/(K*τ)=9.34
(4) 搭建simulink模块构建该模型如图(4)所示;
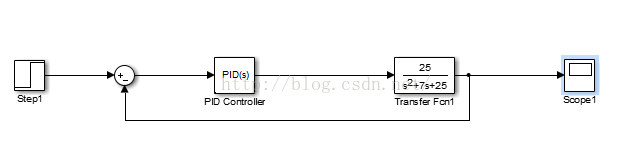
(4)
(5)
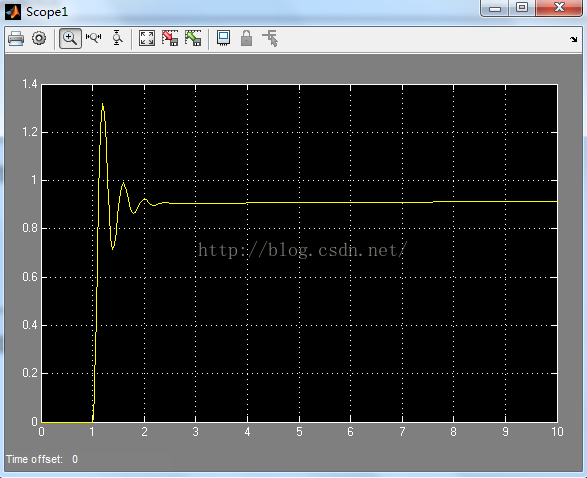
(5)
可以看出,在1-2s时输出存在振荡,后面趋向稳定。
最后
以上就是安详项链最近收集整理的关于基于Simulink的Ziegler-Nichols PID参数经验整定法的全部内容,更多相关基于Simulink的Ziegler-Nichols内容请搜索靠谱客的其他文章。








发表评论 取消回复