1 电流内环调节器设计
矢量控制系统的电流环是对 iq进行控制,控制的是定子电流,进而控制电机转矩。
电流内环的作用是在电机启动过程中能够以最大电流启动,同时在外部扰动是能够快速恢复,加快动态跟踪响应速度,提高系统的稳定性。
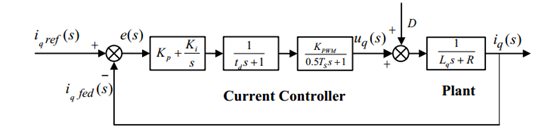
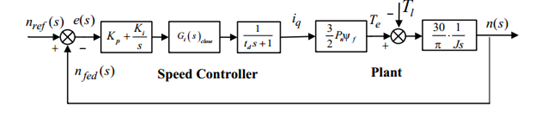
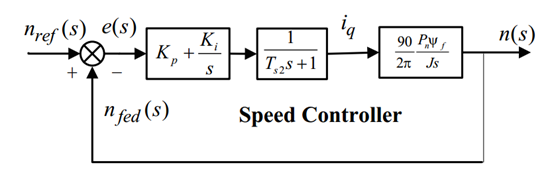
上图为电流内环的流程图,电流内环的输入为电流信号的误差值,输出为参考电压,控制电动机转矩。第一个环节是PI调节器,第二个环节是延迟环节,第三个环节是PWM环节。
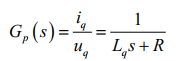
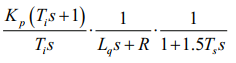
其中电机传递函数可通过近似处理为:
在开关频率为10KHZ时,由于开关频率较高,就可以把延迟环节和PWM环节合并处理,记 td = Ts ,并将 Kpwm看成 1 来处理,可得以下流程图:
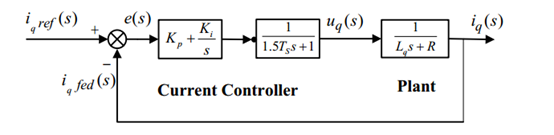
对以上流程图分析,将电流环按照典型的 I 型系统来整定。
则开环传递函数:
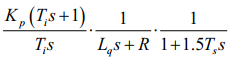
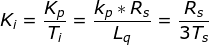
若使得 Ti = Lq / R 可以得到 整定后开环传函:
与一阶典型系统对比,
得到


一阶系统按 KT = 0.5 计算得出

2 转速外环调节器的设计
转速外环设计合理的话,可以减少扰动对系统的影响、减小转速波动,使得系统工作在稳定状态。
在研究转速外环的时候,将电流环视为一节环节;
由二阶系统自身性能,在阻尼比为0.707时性能最佳,即可推:

同电流环,将延时环节与简化的电流环合并处理得

流程图进一步简化为:
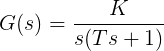
将转速环按二阶典型环节整定,
设转速环 PI 调节器为:
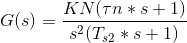
可得一下开环传函:

整理后得:
按照典型的二型系统的参数关系,应有


由典型二阶系统整定理论得,h = 5 时 系统性能最佳。
经过整理得到:
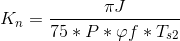

最后
以上就是文艺大米最近收集整理的关于PID整定调解的全部内容,更多相关PID整定调解内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复