matlab机器人工具箱学习笔记——ikine函数
- ikine函数用法
- 使用实例
链接: https://blog.csdn.net/weixin_42596724/article/details/86701569.
ikine函数用法
ikine函数我也是搜了很久资料才摸索出来的,并不全对。
q=R.ikine(T,q0,m,options)
其中
T 为4×4目标矩阵,
q0 为初始角度,
m 当使用3自由度机械手时,m=[1 1 1 0 0 0]。
使用实例
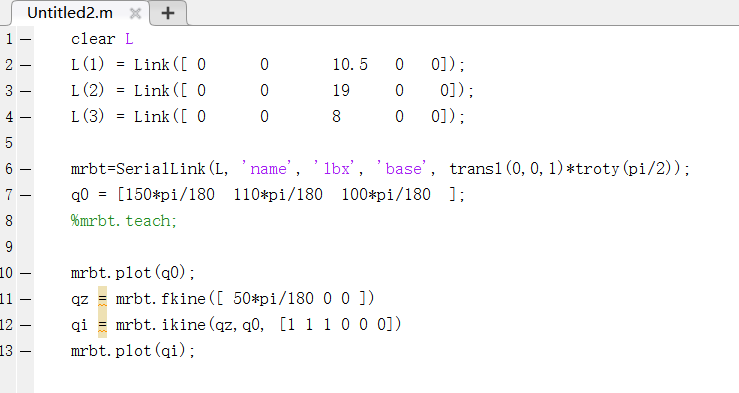
qz是使用fkine函数求出的4×4矩阵,再使用ikine逆解验证
注:不给定初始角度ikine函数就会报错
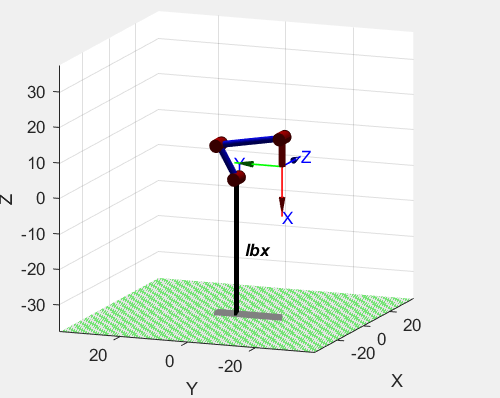
mrbt.plot(q0);
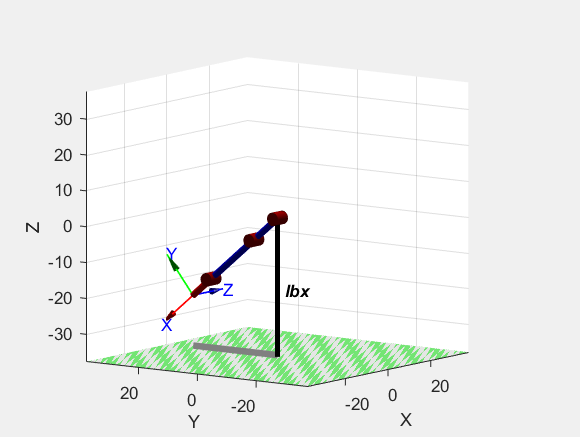
mrbt.plot(qi);
最后
以上就是坦率翅膀最近收集整理的关于matlab机器人工具箱学习笔记——ikine函数ikine函数用法的全部内容,更多相关matlab机器人工具箱学习笔记——ikine函数ikine函数用法内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复