做课题需要用到robotics toolboxs,然而在做simulink仿真的时候总是有很多变量未定义或者报错,下面总结一下几个模块的使用
1、jtraj模块
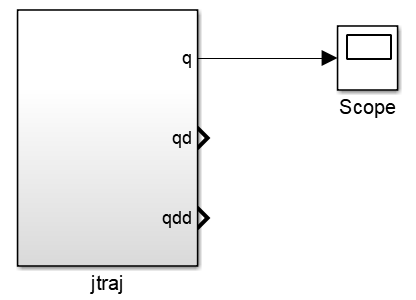
双击jtraj模块,进入参数设置界面:
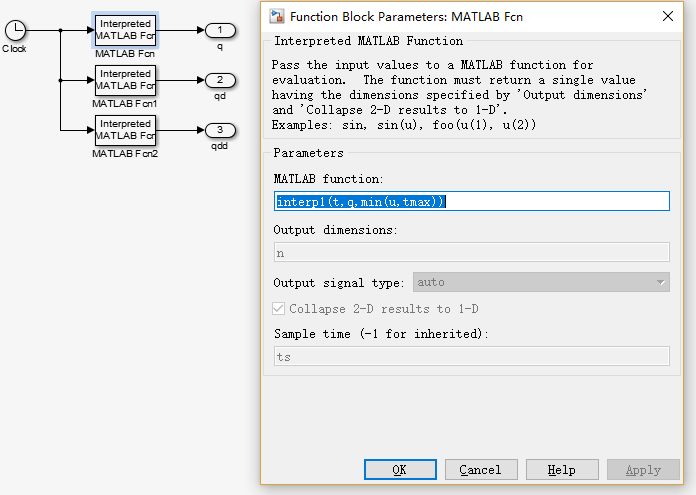
n、ts、t、q、tmax都是需要提前在工作空间设置好才能用的。u是时钟信号可以不用管
下面给出初始化代码:
n = 6; %要求的关节角度维度,若是六自由度,n=6;
ts = 0.01; %采样时间,在连续时间t之间间隔取值,因此后面的t就不要是离散点集了
q0 = [0,0,0,0,0,0]; %初始关节角度
qf = [0 pi/4 pi 0 pi/4 0]; %终止时刻关节角度
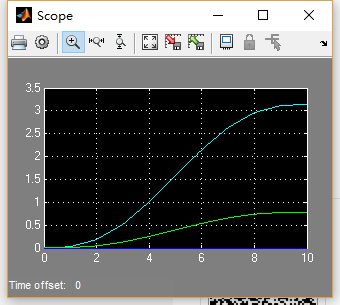
t = 0:10; %完成坐标移动要求的时间
[q,qd,qdd] = jtraj(q0,qf,t);%输出一个点沿一条五次多项式曲线运动随时间变化的坐标
tmax = max(t);结果如下:
2、RNE模块
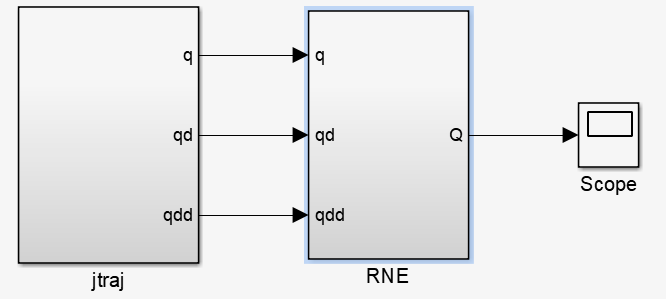
进入RNE参数调节框可以看到
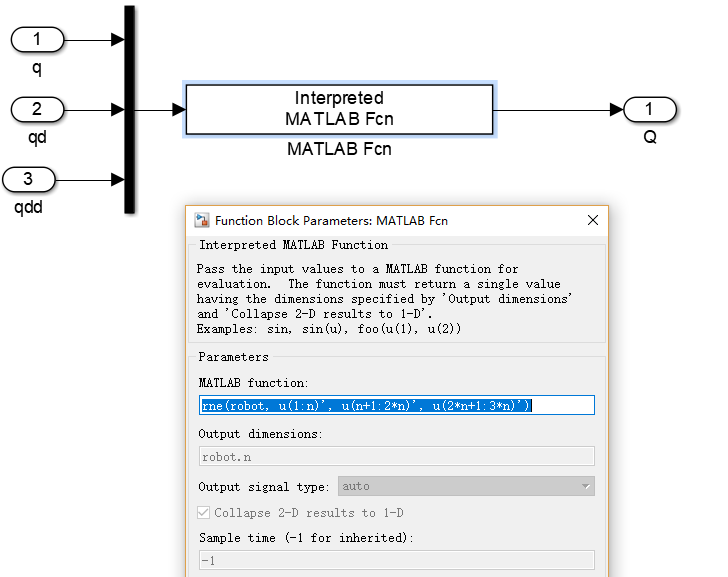
只需要定义robot变量就好了,其他的参数已经被jtraj定义过了。
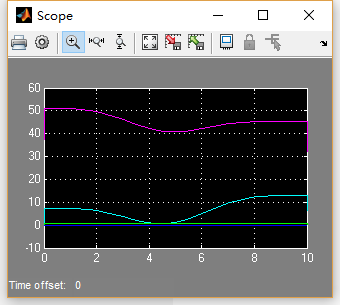
结果:
最后
以上就是无心草丛最近收集整理的关于【机器人基础】robotic工具箱的simulink仿真的全部内容,更多相关【机器人基础】robotic工具箱内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复