PID 控制算法介绍
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称 PID 控制,又称 PID 调节。PID 控制器问世至今已有近 70 年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用 PID 控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用 PID 控制技术。PID 控制,实际中也有 PI 和 PD 控制。
PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。将偏差的比例§、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,故称 PID 控制器,原理框图如图所示。
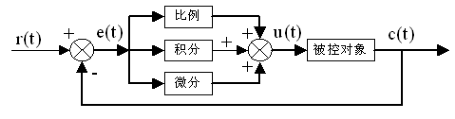
PID 控制器原理框图
在计算机控制系统中,使用的是数字 PID 控制器,控制规律为:
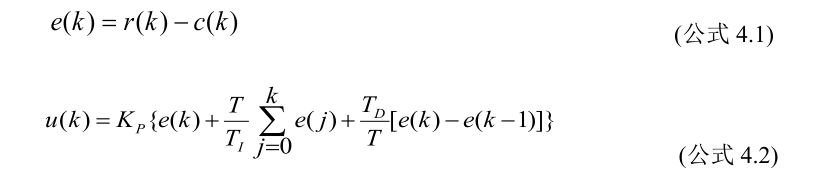
式中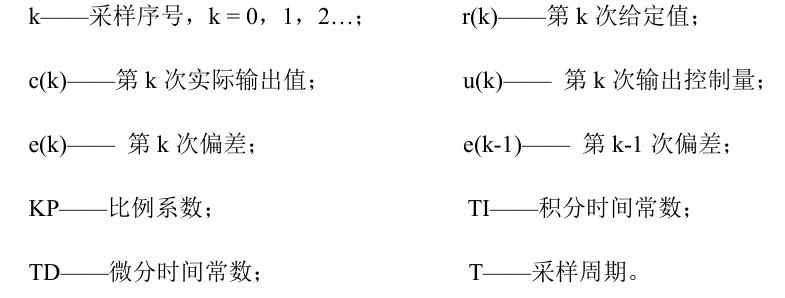
简单说来,PID 控制器各校正环节的作用如下:
- 比例环节:及时成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
- 积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数,越大,积分作用越弱,反之则越强。
- 微分环节:能反映偏差信号的变化趋势(变化速率),并能在该偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法。
位置式 PID
位置式 PID 中,由于计算机输出的 u (k) 直接去控制执行机构(如阀门),u(k)的值和执行机构的位置(如阀门开度)是一一对应的,所以通常称公式(4.2)为位置式 PID 控制算法。

位置式 PID 控制算法的缺点是:由于全量输出,所以每次输出均与过去的状态有关,计算时要对过去 e(k)进行累加,计算机工作量大;而且因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化,会引起执行机构位置的大幅度变化,这种情况往往是生产实践中不允许的,在某些场合,还可能造成严重的生产事故。
因而产生了增量式 PID 控制的控制算法,所谓增量式 PID 是指数字控制器的输出只是控制量的增量△u(k)。
增量式 PID
当执行机构需要的是控制量的增量(例如:驱动步进电机)时,可由式(4.2)推导出提供增量的 PID 控制算式。由式(4.2)可以推出式(4.3),式(4.2)减去式(4.3)可得式(4.4)。
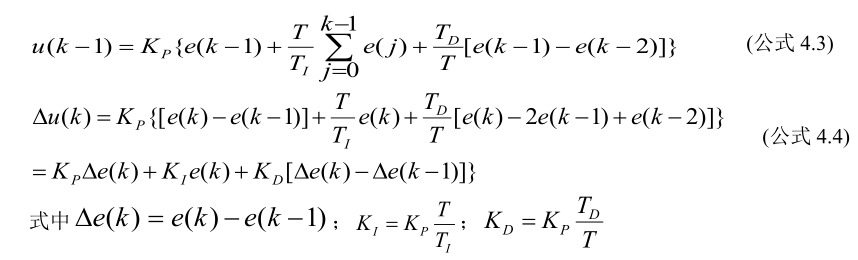
公式(4.4)称为增量式 PID 控制算法,可以看出由于一般计算机控制系统采用恒定的采样周期 T,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差,即可由式(4.4)求出控制增量。
增量式 PID 具有以下优点:
(1) 由于计算机输出增量,所以误动作时影响小,必要时可用逻辑判断的方法关掉。
(2) 手动/自动切换时冲击小,便于实现无扰动切换。此外,当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故能保持原值。
(3) 算式中不需要累加。控制增量△u(k)的确定仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。
但增量式 PID 也有其不足之处:积分截断效应大,有静态误差;溢出的影响大。使用时,常选择带死区、积分分离等改进 PID 控制算法。
最后
以上就是细心菠萝最近收集整理的关于PID控制器的介绍的全部内容,更多相关PID控制器内容请搜索靠谱客的其他文章。








发表评论 取消回复