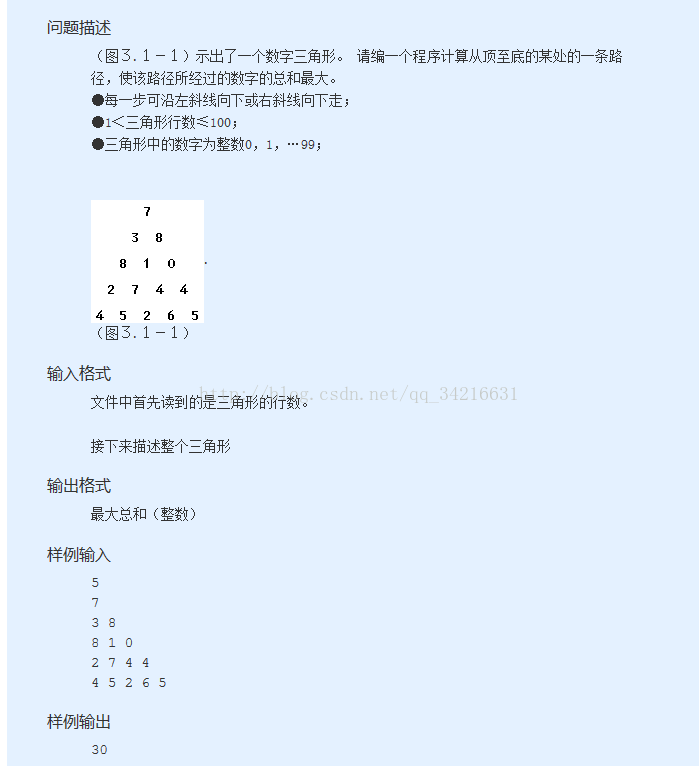
问题:、
代码:
#include <iostream>
using namespace std;
int a[101][101];
int n;
//int sum1;
//int sum2;如果是在外面定义的就会出错得出结果是25,在里面定义不会出错,为啥?
int c(int i,int j)
{
if(i==n)
return a[i][j];//最后一行,递归结束
int sum1=c(i+1,j+1);//随机生成
int sum2=c(i+1,j);
if(sum1>sum2)
return sum1+a[i][j];
else
return sum2+a[i][j];
}
int main() {
cin>>n;
int i,j;
for(i=1;i<=n;i++)
{
for(j=1;j<=i;j++)
cin>>a[i][j];
}
cout<<c(1,1)<<endl;
return 0;
}
总结:
全局变量和局部变量的区别,在递归体中,如果要返回递归的结果中有一个变量,这个变量不要设置为全局,因为递归需要的是上一步的结果,这个结果需要计算得出,递归函数中新定义的变量需要进一步求出值,而全局变量的值为上一个储存的值,这样会产生错误
优化:
#include <iostream>
#include<memory.h>
#include<string>
int a[101][101];
int aset[101][101];//保留修改后的结果
int n;
using namespace std;
int fun(int i,int j)
{
int sum1,sum2;
if(i==n)
{
return a[i][j];
}
else
{
if(aset[i+1][j]==-1)
{
aset[i+1][j]=fun(i+1,j);//都是下一行的
}
if(aset[i+1][j+1]==-1)
{
aset[i+1][j+1]=fun(i+1,j+1);//都是下一行的
}
//int sum2=fun(i+1,j+1);
if(aset[i+1][j]>aset[i+1][j+1])
return fun(i+1,j)+a[i][j];
else
return fun(i+1,j+1)+a[i][j];
}
}
int main() {
cin>>n;
int i,j;
memset(aset,-1,sizeof(aset));//全部设置成0表示多有的函数都没有计算过
for(i=1;i<=n;i++)
{
for(j=1;j<=i;j++)
{
cin>>a[i][j];
}
}
int maxsum=fun(1,1);
cout<<maxsum;
return 0;
}
总结:
照样运用了递归,但是这里面的递归结果会保留数组aset[]里面,下次需要的话可以直接取出,不必再递归出结果,节约时间空间。
将一个问题分解为子问题递归求解,并且将中间结果保存以避免重复计算的办法,就叫做“动态规划”。动态规划通常用来求最优解,能用动态规划解决的求最优解问题,必须满足,最优解的每个局部解也都是最优的。以上题为例,最佳路径上面的每个数字到底部的那一段路径,都是从该数字出发到达到底部的最佳路径。
//调用子问题求解
#include<iostream>
#include<memory.h>
using namespace std;
int a[101][101];
int aset[101][101];
int n;
int main()
{
cin>>n;
memset(aset,-1,sizeof(aset));//置初值
int i,j;
for(i=1;i<=n;i++)//输入
{
for(j=1;j<=i;j++)
{
cin>>a[i][j];
}
}
for(j=1;j<=n;j++){
aset[n][j]=a[n][j];//最后一行的所有值都存在数组里面
}
for(i=n;i>1;i--)//从最后一行开始
{
for(j=1;j<i;j++)//从第一列开始
{
if(aset[i][j]>aset[i][j+1])//找出最大的一列
aset[i-1][j]=aset[i][j]+a[i-1][j];
else
aset[i-1][j]=aset[i][j+1]+a[i-1][j];
}
}
cout<<aset[1][1];//从下至上走到顶
return 0;
} 动态规划解题的一般思路
许多求最优解的问题可以用动态规划来解决。用动态规划解题,首先要把原问题分解为
若干个子问题,这一点和前面的递归方法类似。区别在于,单纯的递归往往会导致子问题被
重复计算,而用动态规划的方法,子问题的解一旦求出就会被保存,所以每个子问题只需求
解一次。
子问题经常和原问题形式相似,有时甚至完全一样,只不过规模从原来的
n变成了 n-1, 或从原来的 n×m变成了 n×(m-1) ……等等。找到子问题,就意味着找到了将整个问题逐
渐分解的办法,因为子问题可以用相同的思路分解成子子问题,一直分解下去,直到最底层
规模最小的的子问题可以一目了然地看出解(象上面数字三角形的递推公式中,
r=N时,解就是一目了然的)。每一层子问题的解决,会导致上一层子问题的解决,逐层向上,就会导
致最终整个问题的解决。如果从最底层的子问题开始,自底向上地推导出一个个子问题的解,
那么编程的时候就不需要写递归函数。
在用动态规划解题时,我们往往将和子问题相关的各个变量的一组取值,称之为一个“状态”。一个“状态”对应于一个或多个子问题,所谓某个“状态”下的“值”,就是这个“状态”所对应的子问题的解。
具体到数字三角形的例子,子问题就是“从位于 (r,j)数字开始,到底边路径的最大和”。这个子问题和两个变量 r和 j相关,那么一个“状态”,就是
r, j的一组取值,即每个数字的 位置就是一个“状态”。该“状态”所对应的“值”,就是从该位置的数字开始,到底边的最佳路径上的数字之和。
定义出什么是“状态”,以及在该“状态”下的“值”后,就要找出不同的状态之间如何迁移―――即如何从一个或多个“值”已知的“状态”,求出另一个“状态”的“值”。状态的迁移可以用递推公式表示,此递推公式也可被称作“状态转移方程”。
如下的递推式就说明了状态转移的方式:
上面的递推式表明了如果知道了状态( r+1,j)和状态(r+1,j+1)对应的值,该如何 求出状态(r,j)对应的值,即两个子问题的解决,如何导致一个更高层的子问题的解决。
所有“状态”的集合,构成问题的“状态空间”。“状态空间”的大小,与用动态规划解决问题的时间复杂度直接相关。在数字三角形的例子里,一共有
N×(N+1)/2个数字,所以
这个问题的状态空间里一共就有 N×(N+1)/2个状态。在该问题里每个“状态”只需要经过 一次,且在每个状态上作计算所花的时间都是和 N无关的常数。
用动态规划解题,经常碰到的情况是,K个整型变量能构成一个状态(如数字三角形中
的行号和列号这两个变量构成“状态”)。如果这 K个整型变量的取值范围分别是
N1, N2, …… Nk,那么,我们就可以用一个
K维的数组
array[N1] [N2]……[Nk]来存储各个状态的“值”。
这个“值”未必就是一个整数或浮点数,可能是需要一个结构才能表示的,那么 array就可 以是一个结构数组。一个“状态”下的“值”通常会是一个或多个子问题的解。
用动态规划解题,
如何寻找“子问题”,定义“状态”,“状态转移方程”是什么样的, 并没有一定之规,需要具体问题具体分析,题目做多了就会有感觉。甚至,对于同一个问题,
分解成子问题的办法可能不止一种,因而“状态”也可以有不同的定义方法。不同的“状态”
定义方法可能会导致时间、空间效率上的区别
最后
以上就是想人陪蜡烛最近收集整理的关于数字三角形(三种)的全部内容,更多相关数字三角形(三种)内容请搜索靠谱客的其他文章。








发表评论 取消回复