什么是避障小车
用红外光电传感器,探测到物体即输出脉冲,输入到单片机中处 理一下,再对电机驱动模块进行控制,实现壁障的功能,这样的避障小车又称为简单的避障机器人。
各种避障方法:
1、红外线避障 2、超声波避障
红外避障原理
基本硬件 红外发射管和接收管:分离式和一体式

变送电路:模拟量;数字量:将模拟量经过比较器输出开关量
选择模块简介:

不怕光HJ-IR2传感器 • 1、HJ-IR2相当于一个红外电子开关,检测到障碍输出低电平,平 时高电平。。 • 2、前方有障碍物时,红外管发出的红外信号经红外接收管接收 回来后,经集成的芯片放大,比较后,输出一低电平,点亮模块 上的LED发光管,同时可以输出一个低平信号,信号可以作为单 片机的信号输入检测控制外部各种驱动模块之用。 • 3、模块三线制,VCC为电原+5V,OUT为信号输出端,GND接电源 负极。 • 4、探测距离大概为1~30CM(探测距离的长短和供电电压、电流还 有周围环境有关,这里只作为参考) • 5、工作电压5V 工作电流 18-30ma左右。
2路壁障模块的输出 :
在一般电子设计比赛等对壁障模块功能要求不高的场合,完全可 以采用比较器输出开关量,这样编程简单,易于实现; 1路壁障模块模块则输出1路开关量,可以接单片机的普通输入IO 口;
2路壁障模块原理 :
根据小车的运行情况有以下几种运动方式:
若没有被任何一个探头检测到,小车直行; 左边探头检测到物体时小车向右转 ; 右这探头检测到物体时小车向左转 •;上述算法描述是最简单的红外壁障算法,如果有一定的速度需求, 则在以上算法上进行改进。
壁障模块的安装调试步骤 :
将2路探头呈一行布置在智能车前方,探头朝前面, 可以采用铜柱+螺丝方式固定; 将中控板固定在车身上; 正确连接中控板和探头的杜邦线; 正确连接控制主板; 将小车放到地面上,前方10CM处放物体,调节电位器, 保证某探头在经过物体时,LED的状态不同。 若无论怎么调节电位器,LED状态都不变化,则应该 是杜邦线接触不好,要更换。
简单源码分析—IO口定义
简单源码分析—算法分析
 主程序:
主程序:
#include "stm32f10x.h"
#include "interface.h"
#include "LCD1602.h"
#include "IRCtrol.h"
#include "motor.h"
#include "UltrasonicCtrol.h"
#include "redvoid.h"
//全局变量定义
unsigned int speed_count=0;//占空比计数器 50次一周期
char front_left_speed_duty=SPEED_DUTY;
char front_right_speed_duty=SPEED_DUTY;
char behind_left_speed_duty=SPEED_DUTY;
char behind_right_speed_duty=SPEED_DUTY;
unsigned char tick_5ms = 0;//5ms计数器,作为主函数的基本周期
unsigned char tick_1ms = 0;//1ms计数器,作为电机的基本计数器
unsigned char tick_200ms = 0;//刷新显示
char ctrl_comm = COMM_STOP;//控制指令
char ctrl_comm_last = COMM_STOP;//上一次的指令
unsigned char continue_time=0;
int main(void)
{
delay_init();
GPIOCLKInit();
UserLEDInit();
// LCD1602Init();
// IRCtrolInit();
TIM2_Init();
MotorInit();
//UltraSoundInit();
RedRayInit();
ServoInit();
while(1)
{
if(tick_5ms >= 5)
{
tick_5ms = 0;
tick_200ms++;
if(tick_200ms >= 40)
{
tick_200ms = 0;
LEDToggle(LED_PIN);
}
VoidRun();
}
}
}
串口部分:
#include "uart.h"
#include "interface.h"
//UART function
//UART1 TxD GPIOA9 RxD GPIOA10
void USART1Conf(u32 baudRate)
{
USART_InitTypeDef USART_InitSturct;//定义串口1的初始化结构体
GPIO_InitTypeDef GPIO_InitStruct;//定义串口对应管脚的结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA , ENABLE);//打开串口管脚时钟
//USART1_Tx_Pin Configure
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;//输出引脚
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;//设置最高速度50MHz
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//推挽复用输出
GPIO_Init(GPIOA , &GPIO_InitStruct);//将初始化好的结构体装入寄存器
//USART1_Rx_Pin Configure
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//GPIO模式悬浮输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;//输入引脚
GPIO_Init(GPIOA, &GPIO_InitStruct);//将初始化好的结构体装入寄存器
//USART1 Configure
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 , ENABLE);//时钟使能
USART_InitSturct.USART_BaudRate = baudRate;//波特率19200
USART_InitSturct.USART_WordLength = USART_WordLength_8b;//数据宽度8位
USART_InitSturct.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitSturct.USART_Parity = USART_Parity_No;//无奇偶校验
USART_InitSturct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitSturct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//使能发送与接收
USART_Init(USART1 , &USART_InitSturct);//将初始化好的结构体装入寄存器
//USART1_INT Configure
USART_ITConfig(USART1 , USART_IT_RXNE , ENABLE);//使能接收中断
// USART_ITConfig(USART1 , USART_IT_TXE , ENABLE);
USART_Cmd(USART1 , ENABLE);//打开串口
USART_ClearFlag(USART1 , USART_FLAG_TC);//解决第一个数据发送失败的问题
}
void PutChar(u8 Data)
{
USART_SendData(USART1 , Data);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);//等待发送完毕
}
void PutStr(char *str)//发送一个字符串
{
while(*str != '�')
{
USART_SendData(USART1 , *str++);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);//等待发送完毕
}
}
void PutNChar(u8 *buf , u16 size)
{
u8 i;
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); //防止第一字节丢失
for(i=0;i<size;i++)
{
USART_SendData(USART1 , buf[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);//等待发送完毕
}
}
电机模块:
#include "motor.h"
#include "interface.h"
#include "stm32f10x.h"
//GPIO配置函数
void MotorGPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = FRONT_LEFT_F_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(FRONT_LEFT_F_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FRONT_LEFT_B_PIN;
GPIO_Init(FRONT_LEFT_B_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FRONT_RIGHT_F_PIN;
GPIO_Init(FRONT_RIGHT_F_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FRONT_RIGHT_B_PIN;
GPIO_Init(FRONT_RIGHT_B_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BEHIND_LEFT_F_PIN;
GPIO_Init(BEHIND_LEFT_F_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BEHIND_LEFT_B_PIN;
GPIO_Init(BEHIND_LEFT_B_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BEHIND_RIGHT_F_PIN;
GPIO_Init(BEHIND_RIGHT_F_GPIO, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BEHIND_RIGHT_B_PIN;
GPIO_Init(BEHIND_RIGHT_B_GPIO, &GPIO_InitStructure);
}
//根据占空比驱动电机转动
void CarMove(void)
{
BEHIND_RIGHT_EN;
/* //左前轮
if(front_left_speed_duty > 0)//向前
{
if(speed_count < front_left_speed_duty)
{
FRONT_LEFT_GO;
}else
{
FRONT_LEFT_STOP;
}
}
else if(front_left_speed_duty < 0)//向后
{
if(speed_count < (-1)*front_left_speed_duty)
{
FRONT_LEFT_BACK;
}else
{
FRONT_LEFT_STOP;
}
}
else //停止
{
FRONT_LEFT_STOP;
}*/
//右前轮
if(front_right_speed_duty > 0)//向前
{
if(speed_count < front_right_speed_duty)
{
FRONT_RIGHT_GO;
}else //停止
{
FRONT_RIGHT_STOP;
}
}
else if(front_right_speed_duty < 0)//向后
{
if(speed_count < (-1)*front_right_speed_duty)
{
FRONT_RIGHT_BACK;
}else //停止
{
FRONT_RIGHT_STOP;
}
}
else //停止
{
FRONT_RIGHT_STOP;
}
//左后轮
if(behind_left_speed_duty > 0)//向前
{
if(speed_count < behind_left_speed_duty)
{
BEHIND_LEFT_GO;
} else //停止
{
BEHIND_LEFT_STOP;
}
}
else if(behind_left_speed_duty < 0)//向后
{
if(speed_count < (-1)*behind_left_speed_duty)
{
BEHIND_LEFT_BACK;
} else //停止
{
BEHIND_LEFT_STOP;
}
}
else //停止
{
BEHIND_LEFT_STOP;
}
/* //右后轮
if(behind_right_speed_duty > 0)//向前
{
if(speed_count < behind_right_speed_duty)
{
BEHIND_RIGHT_GO;
} else //停止
{
BEHIND_RIGHT_STOP;
}
}
else if(behind_right_speed_duty < 0)//向后
{
if(speed_count < (-1)*behind_right_speed_duty)
{
BEHIND_RIGHT_BACK;
} else //停止
{
BEHIND_RIGHT_STOP;
}
}
else //停止
{
BEHIND_RIGHT_STOP;
}*/
}
//向前
void CarGo(void)
{
front_left_speed_duty=SPEED_DUTY;
front_right_speed_duty=SPEED_DUTY;
behind_left_speed_duty=SPEED_DUTY;
behind_right_speed_duty=SPEED_DUTY;
}
//后退
void CarBack(void)
{
front_left_speed_duty=-SPEED_DUTY;
front_right_speed_duty=-SPEED_DUTY;
behind_left_speed_duty=-SPEED_DUTY;
behind_right_speed_duty=-SPEED_DUTY;
}
//向左
void CarLeft(void)
{
front_left_speed_duty=-20;
front_right_speed_duty=SPEED_DUTY;
behind_left_speed_duty=-20;
behind_right_speed_duty=SPEED_DUTY+10;//增加后轮驱动力
}
//向右
void CarRight(void)
{
front_left_speed_duty=SPEED_DUTY;
front_right_speed_duty=-20;
behind_left_speed_duty=SPEED_DUTY+10;//增加后轮驱动力
behind_right_speed_duty=-20;
}
//停止
void CarStop(void)
{
front_left_speed_duty=0;
front_right_speed_duty=0;
behind_left_speed_duty=0;
behind_right_speed_duty=0;
}
void MotorInit(void)
{
MotorGPIO_Configuration();
CarStop();
}
红外遥控配置:
#include "IRCtrol.h"
#include "interface.h"
unsigned char ir_rec_flag=0;//接收数据标志位 1 有新数据 0 没有
unsigned char IRCOM[4];
//use time3 realize delay systick已经在main函数中使用了,在中断中不能重复使用
void Time3Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 1;
TIM_TimeBaseStructure.TIM_Prescaler = (72 - 1);//72M / 72 = 1us
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Down;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
}
//1us 延时
void DelayUs(vu32 nCount)
{
u16 TIMCounter = nCount;
TIM_Cmd(TIM3, ENABLE);
TIM_SetCounter(TIM3, TIMCounter);
while (TIMCounter>1)
{
TIMCounter = TIM_GetCounter(TIM3);
}
TIM_Cmd(TIM3, DISABLE);
}
//外部中断配置 红外遥控配置
void IRCtrolInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;//定义一个外部中断相关的结构体
NVIC_InitTypeDef NVIC_InitStructure; //定义一个中断的结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO , ENABLE);
GPIO_InitStructure.GPIO_Pin = IRIN_PIN;//配置使能GPIO管脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//配置GPIO模式,输入上拉
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//配置GPIO端口速度
GPIO_Init(IRIN_GPIO , &GPIO_InitStructure);
GPIO_EXTILineConfig(IRIN_PORTSOURCE , IRIN_PINSOURCE);
EXTI_InitStructure.EXTI_Line = IRIN_EXITLINE;//将对应的GPIO口连接到中断线上
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//中断事件类型,下降沿
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//选择模式,中断型
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能该中断
EXTI_Init(&EXTI_InitStructure);//将配置好的参数写入寄存器
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); //阶级为0,不可嵌套
NVIC_InitStructure.NVIC_IRQChannel = IRIN_IRQCH;//打开PINA_8的外部中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//主优先级0,最高
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级,最低
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能该模块中断
NVIC_Init(&NVIC_InitStructure); //中断初始化,将结构体定义的数据执行
Time3Init();
}
/*******************************************************************************
* 函 数 名 :DelayIr
* 函数功能 :0.14MS 延时
* 输 入 :无
* 输 出 :无
*******************************************************************************/
void DelayIr(unsigned char x)
{
while(x--)
{
DelayUs(140);
}
}
void IRIntIsr(void)
{
unsigned char j,k,N=0;
DelayIr(15);
if (IRIN==1)
{
return;
}
continue_time = 40;//连发信号,表示指令持续 40*5 = 200ms 无指令停车
//确认IR信号出现
while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
{DelayIr(1);}
for (j=0;j<4;j++) //收集四组数据
{
for (k=0;k<8;k++) //每组数据有8位
{
while (IRIN) //等 IR 变为低电平,跳过4.5ms的前导高电平信号。
{DelayIr(1);}
while (!IRIN) //等 IR 变为高电平
{DelayIr(1);}
while (IRIN) //计算IR高电平时长
{
DelayIr(1);
N++;
if (N>=30)
{
return;} //0.14ms计数过长自动离开。
} //高电平计数完毕
IRCOM[j]=IRCOM[j] >> 1; //数据最高位补“0”
if (N>=8) {IRCOM[j] = IRCOM[j] | 0x80;} //数据最高位补“1”
N=0;
}//end for k
}//end for j
k = ~IRCOM[3];
if (IRCOM[2] != k)
{
return; }
//指令转换
switch(IRCOM[2])
{
case 0x46: ctrl_comm = COMM_UP;break;
case 0x15: ctrl_comm = COMM_DOWN;break;
case 0x44: ctrl_comm = COMM_LEFT;break;
case 0x43: ctrl_comm = COMM_RIGHT;break;
case 0x40: ctrl_comm = COMM_STOP;break;
default : return;
}
ir_rec_flag = 1;
}
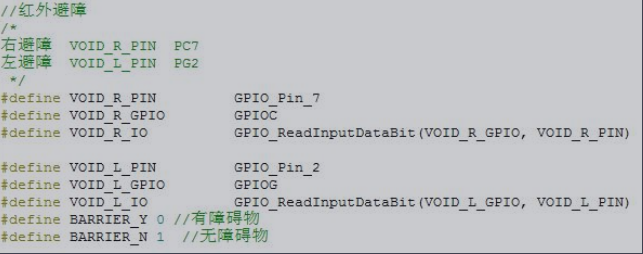
红外避障模块:
#include "redvoid.h"
#include "interface.h"
#include "motor.h"
extern char ctrl_comm;
//获取红外避障模块状态
char GetVoidStatus(void)
{
char left=0,right=0;
char count;
if(VOID_L_IO == BARRIER_Y)
{
count = 2;
while(--count)//10ms 采集2次均要采集到前面障碍物信息,滤波
{
if(VOID_L_IO == BARRIER_N)
break;
Delayms(1);
}
if(count == 0) left = 1;
}
if(VOID_R_IO == BARRIER_Y)
{
count = 2;
while(--count)//10ms 采集2次均要采集到前面障碍物信息,滤波
{
if(VOID_R_IO == BARRIER_N)
break;
Delayms(1);
}
if(count == 0) right = 2;
}
return left + right;
}
//延时的同时检测红外,一旦发生障碍物,就停止并跳出延时
void DelayCheck(int ms)
{
while(ms--)
{
Delayms(1);
if(VOID_NONE != GetVoidStatus())
{
CarStop();
return;
}
}
}
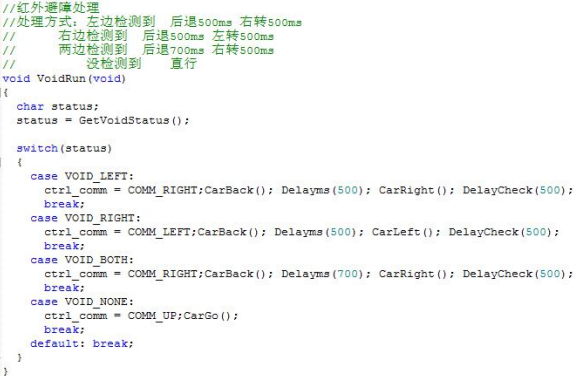
//红外避障处理
//处理方式:左边检测到 后退500ms 右转500ms
// 右边检测到 后退500ms 左转500ms
// 两边检测到 后退700ms 右转500ms
// 没检测到 直行
void VoidRun(void)
{
char status;
status = GetVoidStatus();
switch(status)
{
case VOID_LEFT:
ctrl_comm = COMM_RIGHT;CarBack(); Delayms(500); CarRight(); DelayCheck(500);
break;
case VOID_RIGHT:
ctrl_comm = COMM_LEFT;CarBack(); Delayms(500); CarLeft(); DelayCheck(500);
break;
case VOID_BOTH:
ctrl_comm = COMM_RIGHT;CarBack(); Delayms(700); CarRight(); DelayCheck(500);
break;
case VOID_NONE:
ctrl_comm = COMM_UP;CarGo();
break;
default: break;
}
}
最后
以上就是端庄背包最近收集整理的关于基于STM32红外避障小车的设计(有代码)的全部内容,更多相关基于STM32红外避障小车内容请搜索靠谱客的其他文章。








发表评论 取消回复