今天看扩张观测器,根据文献[1]的模型和控制算法,自己写了一份仿真代码。
% 2021.7.16 基于广义扩张状态观测器的干扰不匹配离散系统状态反馈控制
clc; clear all; close all;
set(0,'defaultfigurecolor','w');
%% 建模
% 连续模型(1)
nx=2; % x的维度
Ac=[0 1; -0.0011 -40;];
buc=[0 39005.6]';
bdc=[0 -55248.6]';
% 离散化(2)
T0=0.001;
[Phi, Gamma_u]=c2d(Ac,buc,T0);
[~, Gamma_d]=c2d(Ac,bdc,T0);
C=[1 0];
% 增广(4)
Theta=[Phi, Gamma_d; zeros(1, nx) 1];
Delta_u=[Gamma_u; 0];
Delta_h=[zeros(2,1); 1];
H=[C, 0];
%% 观测器
% Qo=obsv(Theta, H);
% rank(Qo) % 3
po=[0.1 0.1 0.1];
L=acker(Theta', H',po)';
%% 控制器
% Qcx=ctrb(Theta(1:2,1:2), Delta_u(1:2));
% rank(Qcx) % 2
pcx=[0.2 0.3];
Kx=-acker(Theta(1:2,1:2), Delta_u(1:2),pcx);
Kd=-Gamma_u'*Gamma_d/(norm(Gamma_u,2)^2);
%% 仿真
span=0.2;
N=floor(span/T0)+1;
x=zeros(nx,N); x(:,1)=randn(2,1);
x_hat=zeros(nx,N);
d=zeros(1,N);
d_hat=zeros(1,N);
u=zeros(1,N);
y=zeros(1,N); y(1)=C*x(:,1);
h=0.1*T0^3*ones(1,N);
xi_hat=zeros(nx+1,N);
for k=1:N-1
% 真实系统
x(:,k+1)=Phi*x(:,k)+Gamma_u*u(k)+Gamma_d*d(k);
d(k+1)=d(k)+h(k);
if k==floor(N/2)
d(k+1)=d(k+1)+0.1;
end
y(:,k+1)=C*x(:,k+1);
% 估计器
xi_hat(:,k+1)=Theta*xi_hat(:,k)+Delta_u*u(k)+Delta_h*h(k)+L*(y(k)-H*xi_hat(:,k));
x_hat(:,k+1)=xi_hat(1:nx,k+1);
d_hat(k+1)=xi_hat(end,k+1);
u(k+1)=Kx*x_hat(:,k+1)+Kd*d_hat(:,k+1);
end
ex=x-x_hat;
ed=d-d_hat;
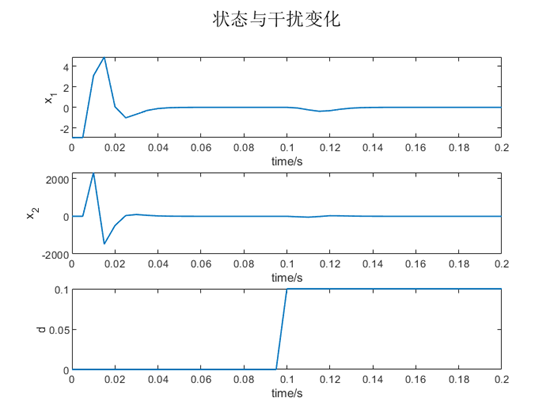
%% 画图
figure(); hold on; grid on;
subplot(3,1,1); plot(0:T0:span, x(1,:), 'LineWidth',1);
xlabel('time/s'),ylabel('x_1');
subplot(3,1,2); plot(0:T0:span, x(2,:), 'LineWidth',1);
xlabel('time/s'),ylabel('x_2');
subplot(3,1,3); plot(0:T0:span, d, 'LineWidth',1);
xlabel('time/s'),ylabel('d');
suptitle('状态与干扰变化');
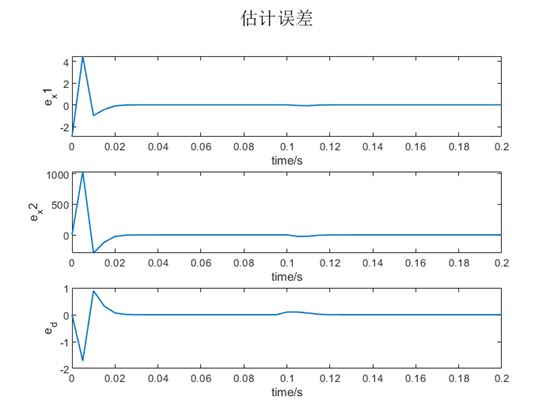
figure(); hold on; grid on;
subplot(3,1,1); plot(0:T0:span, ex(1,:), 'LineWidth',1);
xlabel('time/s'),ylabel('e_{x1}');
subplot(3,1,2); plot(0:T0:span, ex(2,:), 'LineWidth',1);
xlabel('time/s'),ylabel('e_{x2}');
subplot(3,1,3); plot(0:T0:span, ed, 'LineWidth',1);
xlabel('time/s'),ylabel('e_d');
suptitle('估计误差');
figure(); hold on; grid on;
plot(0:T0:span, y, 'LineWidth',1);
xlabel('time/s'),ylabel('y'); title('输出值');
figure(); hold on; grid on;
plot(0:T0:span, u, 'LineWidth',1);
xlabel('time/s'),ylabel('u'); title('控制量');
采样时间设为0.005s时的结果图:
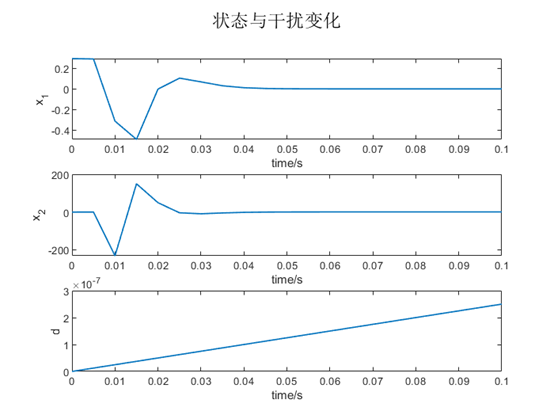
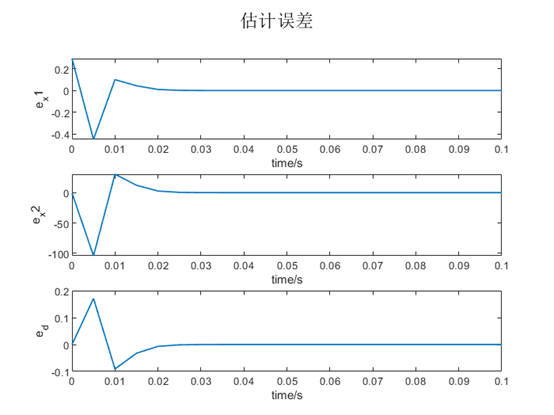
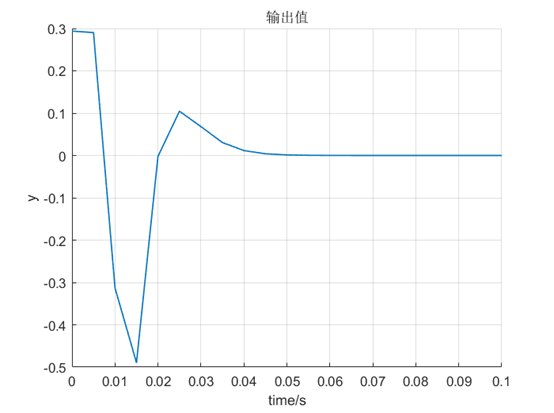
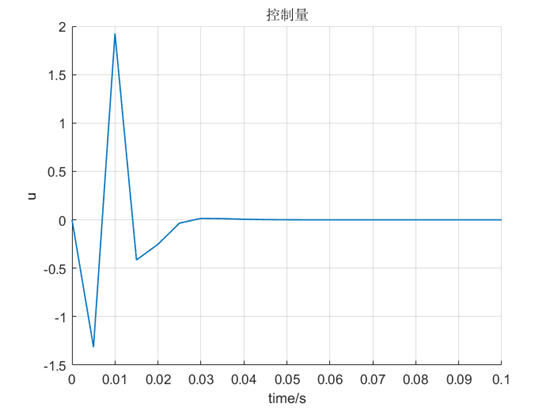
突加幅值为0.1的阶跃扰动后:
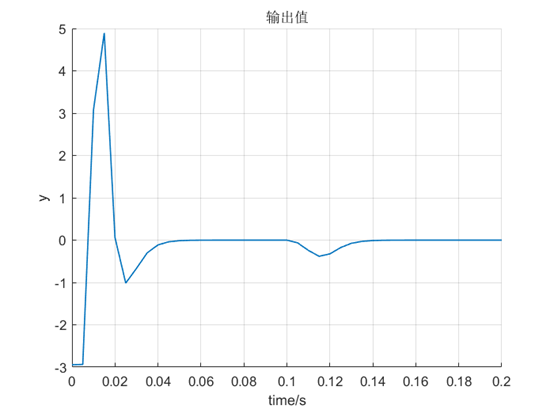
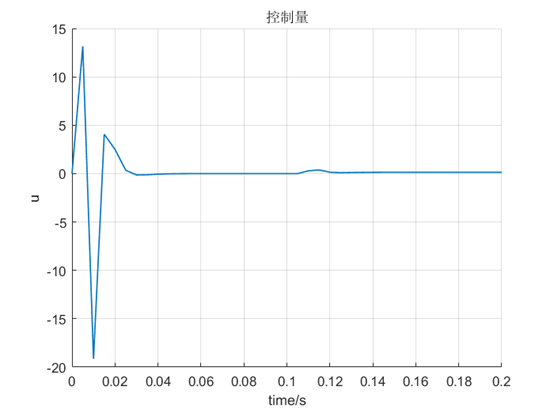
控制效果很好。
参考文献
[1] 张文安,马剑,刑科新.基于广义扩张状态观测器的干扰不匹配离散系统状态反馈控制[J].控制与决策,2016,31(06):1128-1132.
最后
以上就是爱笑乌龟最近收集整理的关于论文仿真:基于广义扩张状态观测器的干扰不匹配离散系统状态反馈控制参考文献的全部内容,更多相关论文仿真:基于广义扩张状态观测器内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复