基本PID控制
一、控制要求
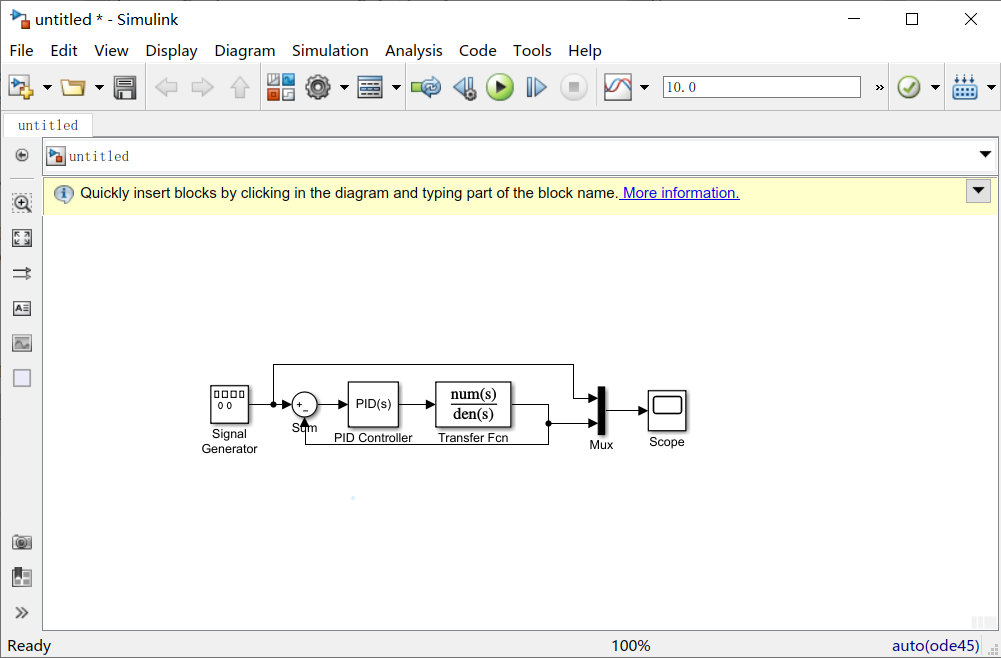
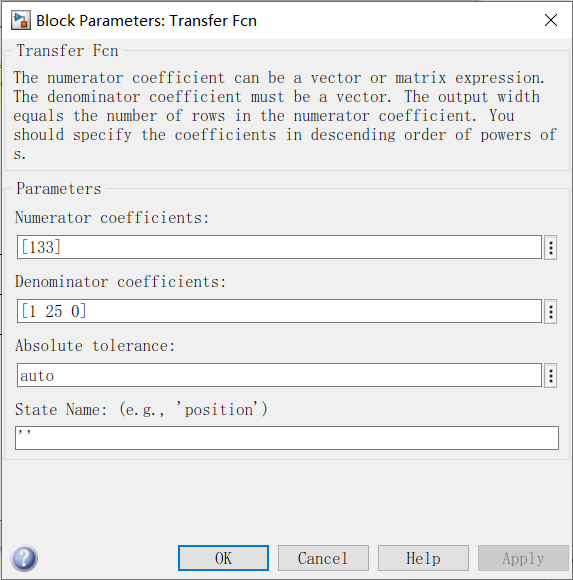
被控对象为二阶线性传递函数为133/(s^2+25s)
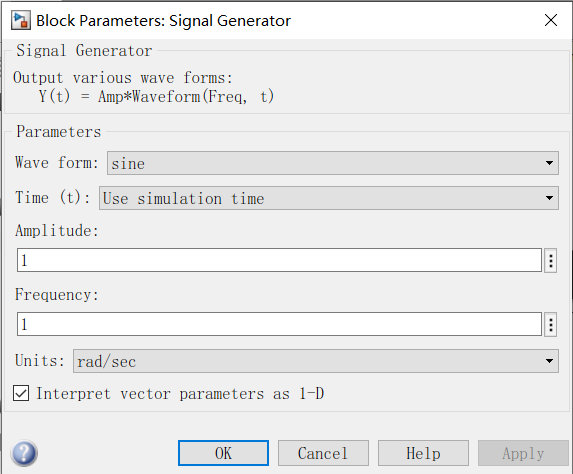
发生信号为正弦信号y=A*sin(2*pi*Ft)
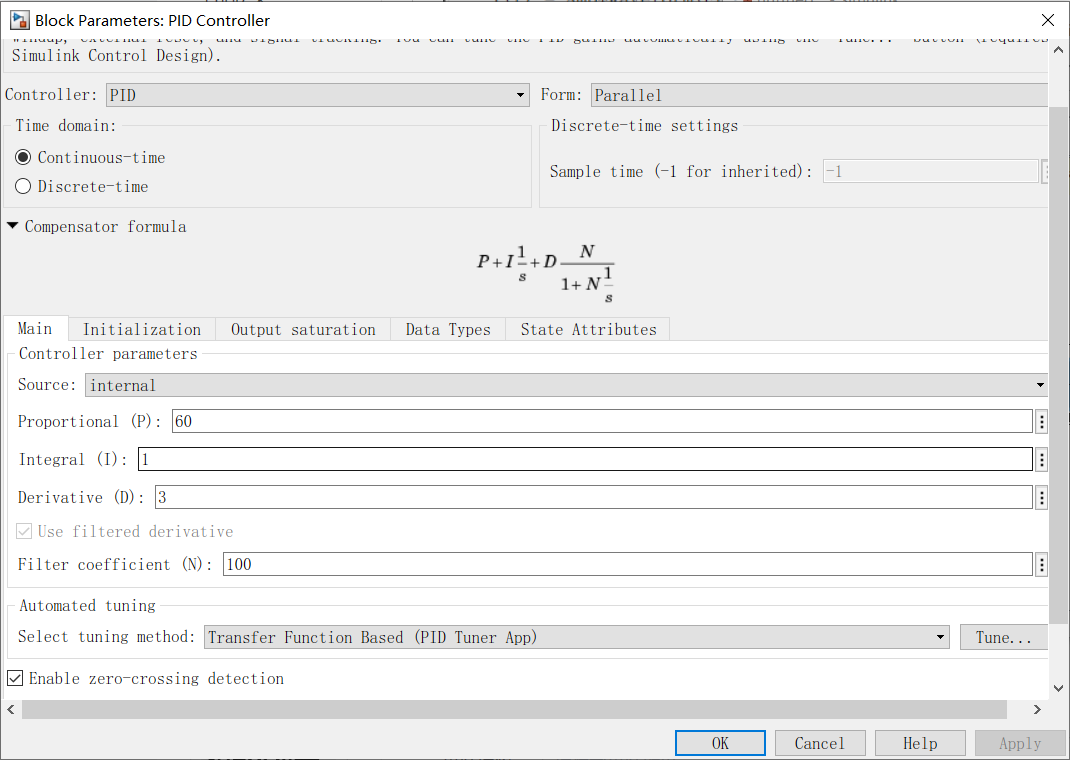
比例环节系数Kp=60,积分环节系数Ki=1,微分环节系数Kd=3
二、操作步骤
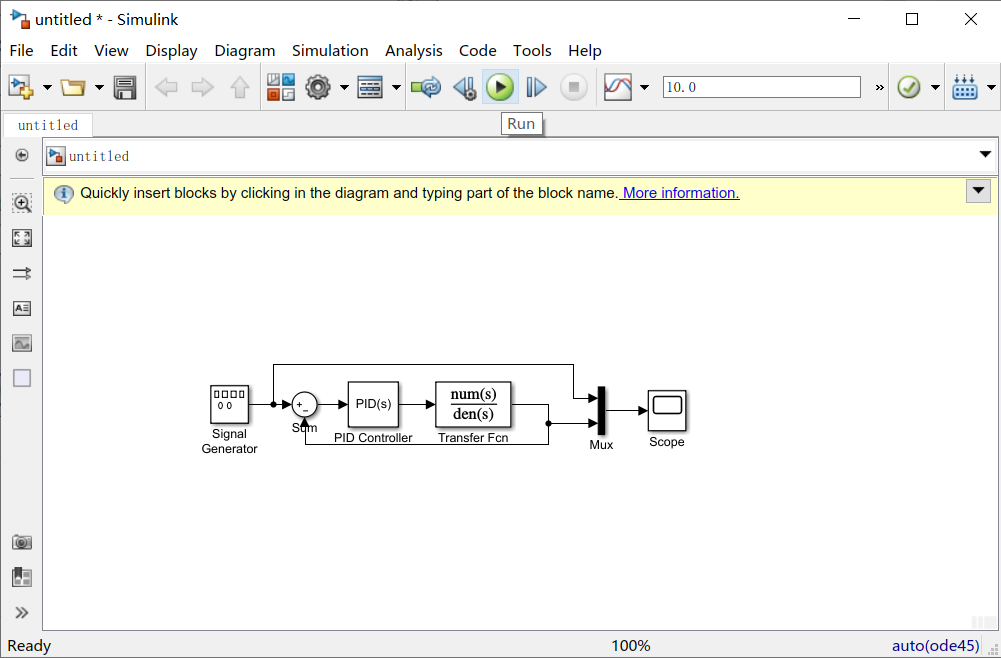
1、打开simulink界面
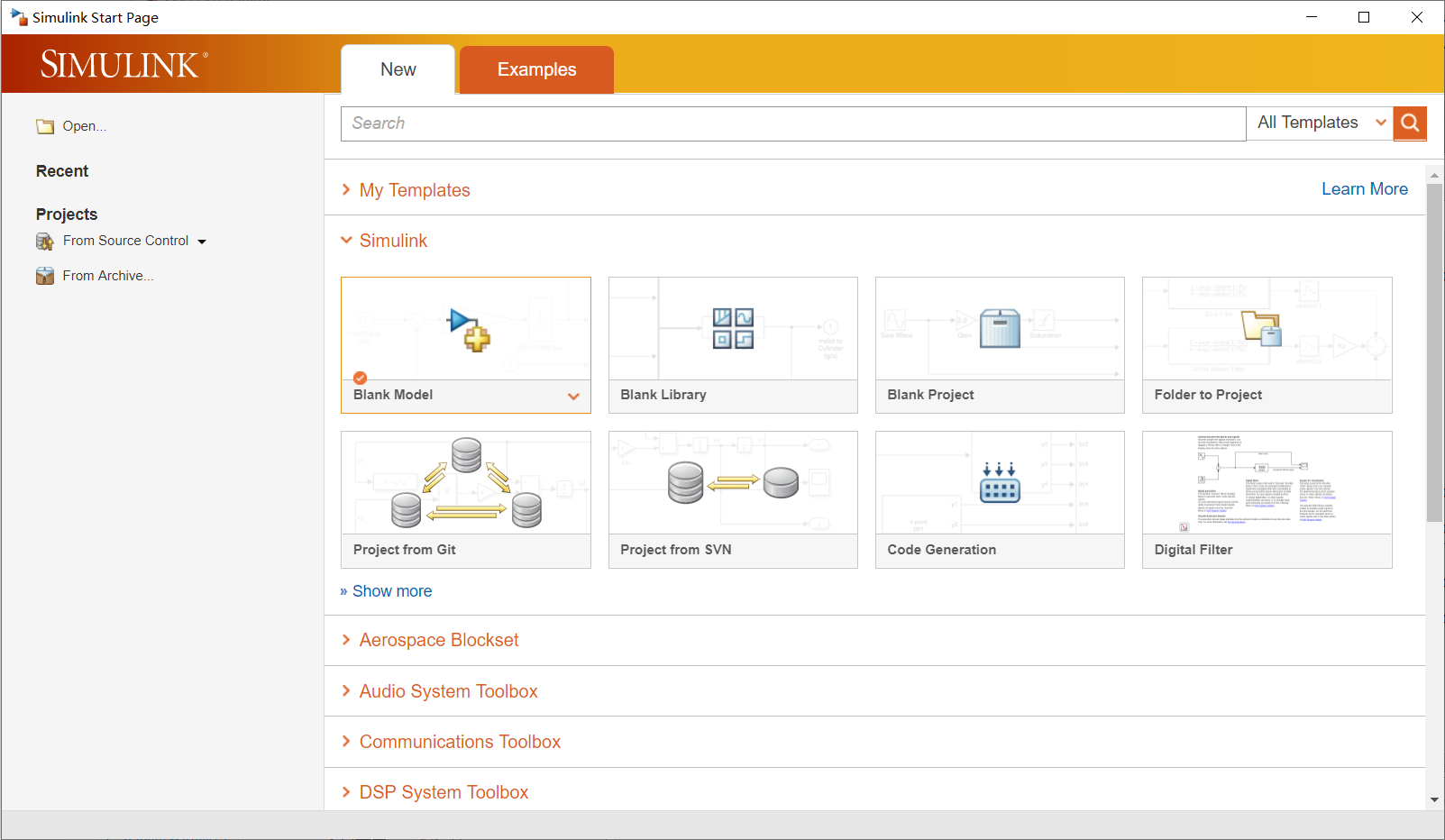
2、选择第一个空模板
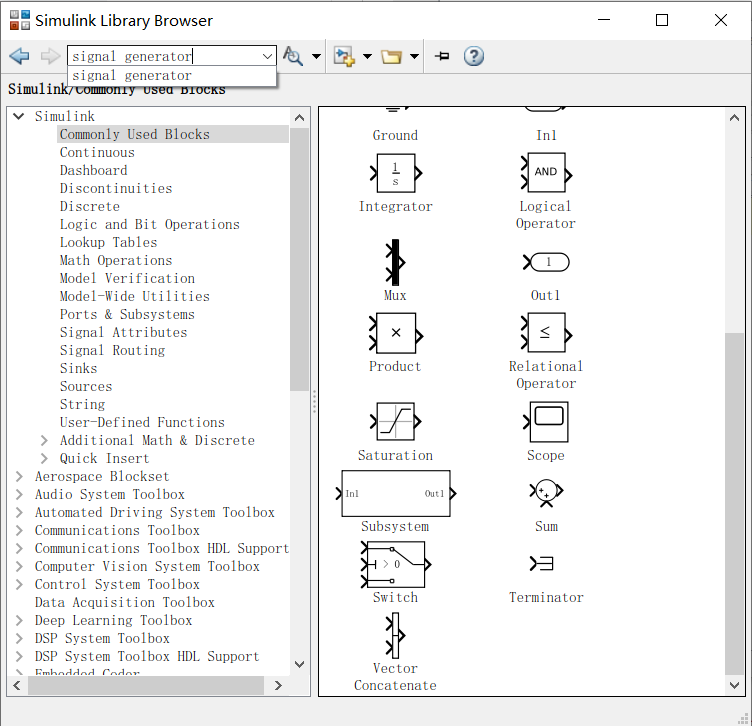
3、进入操作界面,打开工具库
4、搜索需要的工具,选中拖动到空白界面中。
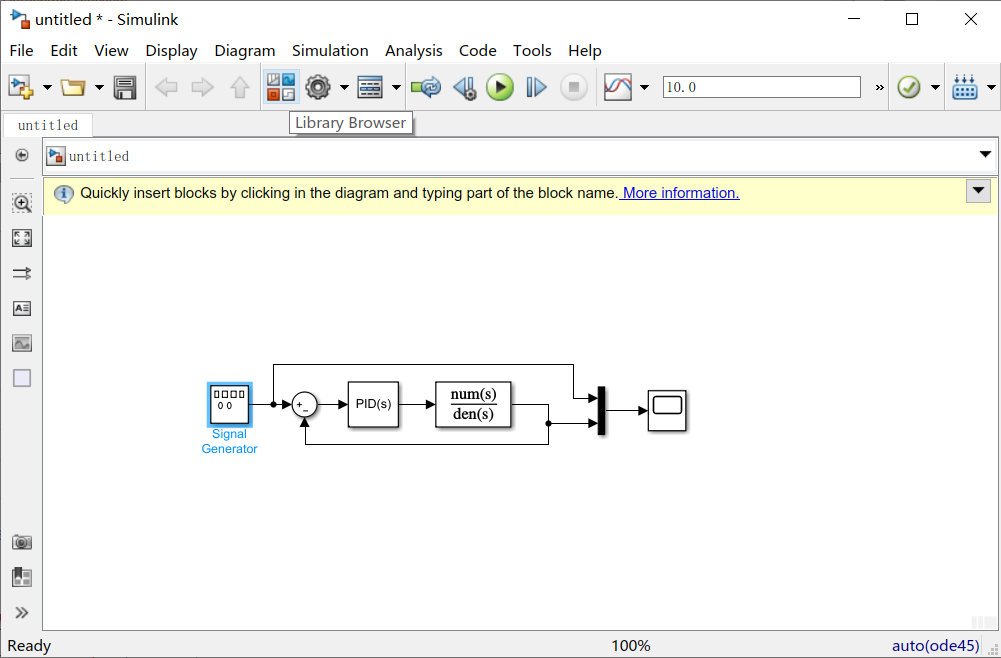
5、根据工具名称,依次选取并连线。
6、双击signal generator进入信号源设置界面,设置参数如图所示。
7、双击PID Controller进入PID控制器属性设置界面,根据题目要求设置参数如图所示。
8、双击Transfer Fcn根据题目要求,设置传递函数参数如图所示。
9、单击RUN,运行
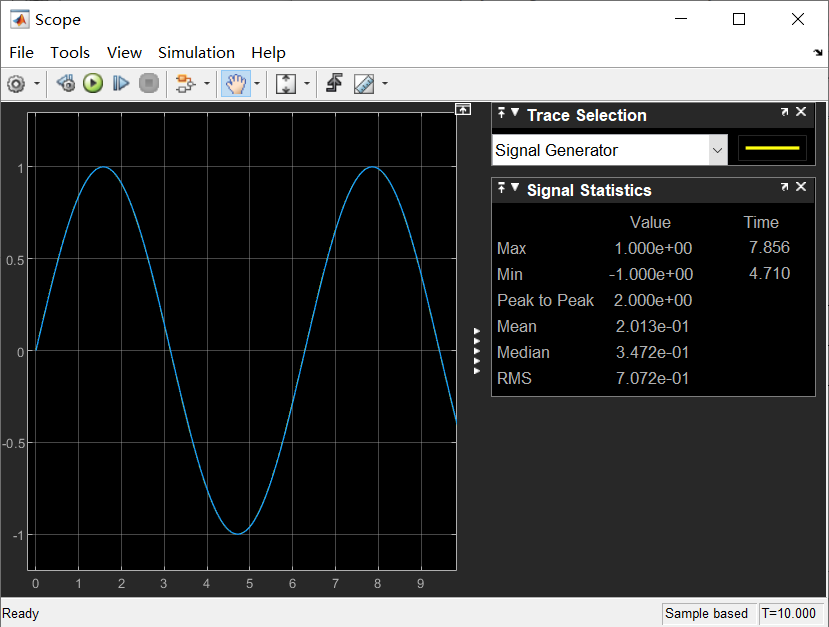
10、双节Scope,查看结果如图所示
最后
以上就是沉默墨镜最近收集整理的关于MATLAB之Simulink仿真——PID控制实例基本PID控制的全部内容,更多相关MATLAB之Simulink仿真——PID控制实例基本PID控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复