运动建模
左转辅助模型计算前提
- 通过map匹配得知,hv在左转车道;
- hv开启左转向灯
- hv左前方的对向车道有远车驶入路口(可通过对rv进行地图匹配判断)
模型介绍
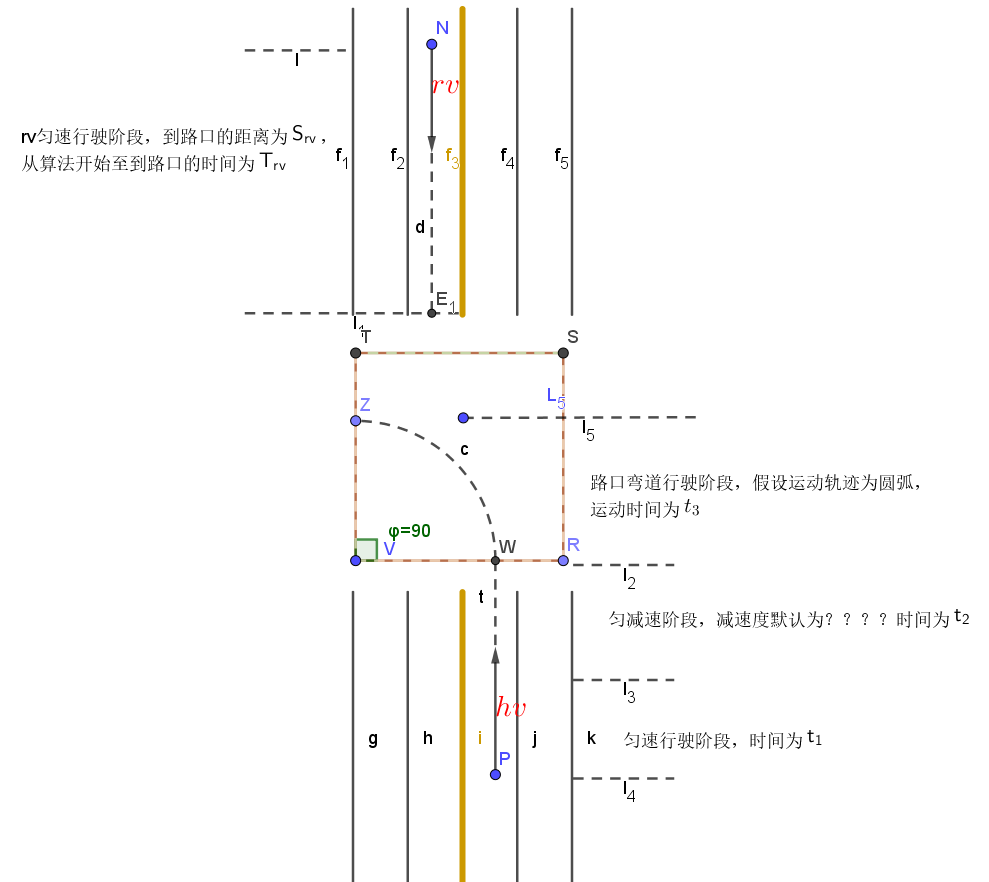
如下图所示,hv、rv简化为一个质点,hv、rv箭头所指方向为hv、rv行驶方向。rv的运动轨迹简化为匀速直线运动,其速度为 v r v v_{rv} vrv,hv的运动轨迹简化为三个阶段:
- 以初速度 v h v v_{hv} vhv匀速运动阶段;
- 左转准备阶段,此阶段简化为匀减速运动,减速度为 a h v _ d e c a_{hv_dec} ahv_dec;
- 到达停止线后,开始转弯动作,此过程的运动轨迹简化为圆弧,圆弧的角度 φ = 90 varphi=90 φ=90度(对应的弧度为 π 2 frac{pi}{2} 2π),半径为车道数乘以车道宽度,且假设转弯时,hv的速度固定为 v t u r n = 23 k m / h v_{turn}=23km/h vturn=23km/h。
设hv三个运动阶段的时间分别为
t
1
、
t
2
、
t
3
t_1、t_2、t_3
t1、t2、t3,三个运动阶段的总时间为
T
t
o
t
a
l
=
t
1
+
t
2
+
t
3
T_{total}=t_1+t_2+t_3
Ttotal=t1+t2+t3,另设rv从算法开始时至运动到rv所在车道的停止线处所用时间为
T
r
v
T_{rv}
Trv,则若满足:
T
t
o
t
a
l
<
T
r
v
(1)
T_{total}<T_{rv}tag{1}
Ttotal<Trv(1)
则hv左转时不会与rv发生碰撞,否则会发生碰撞。
模型运行过程
最后
以上就是忐忑电源最近收集整理的关于左转辅助算法学习笔记的全部内容,更多相关左转辅助算法学习笔记内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复