我是靠谱客的博主 勤恳硬币,这篇文章主要介绍【Gazebo】ROS和Gazebo进行自动驾驶传感器仿真Velodyne LIDAR、Laser scanner自动驾驶汽车传感器-ROS仿真一.Velodyne LIDAR仿真二、laser scanner仿真,现在分享给大家,希望可以做个参考。
自动驾驶汽车传感器-ROS仿真
- Velodyne LIDAR
- Laser scanner
- Camera
- Stereo camera
- GPS
- IMU
- Ultrasonic sensor
一.Velodyne LIDAR仿真
激光雷达在自动驾驶汽车中是非常重要的一部分,下面使用ROS和Gazebo进行仿真:
1.创建ROS工作空间
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
2.在ROS Kinetic中安装Velodyne LIDAR功能包
$ sudo apt-get install ros-kinetic-velodyne-simulator
3.克隆功能包到ROS工作空间
$ git clone https://bitbucket.org/DataspeedInc/velodyne_simulator.git
克隆功能包以后直接复制到/catkin_ws/src目录下(当然也可以cp代码实现),
回到workspace根目录下,编译功能包:
$ catkin_make
到这里ROS可视化工具RViz和仿真工具Gazebo就打开了
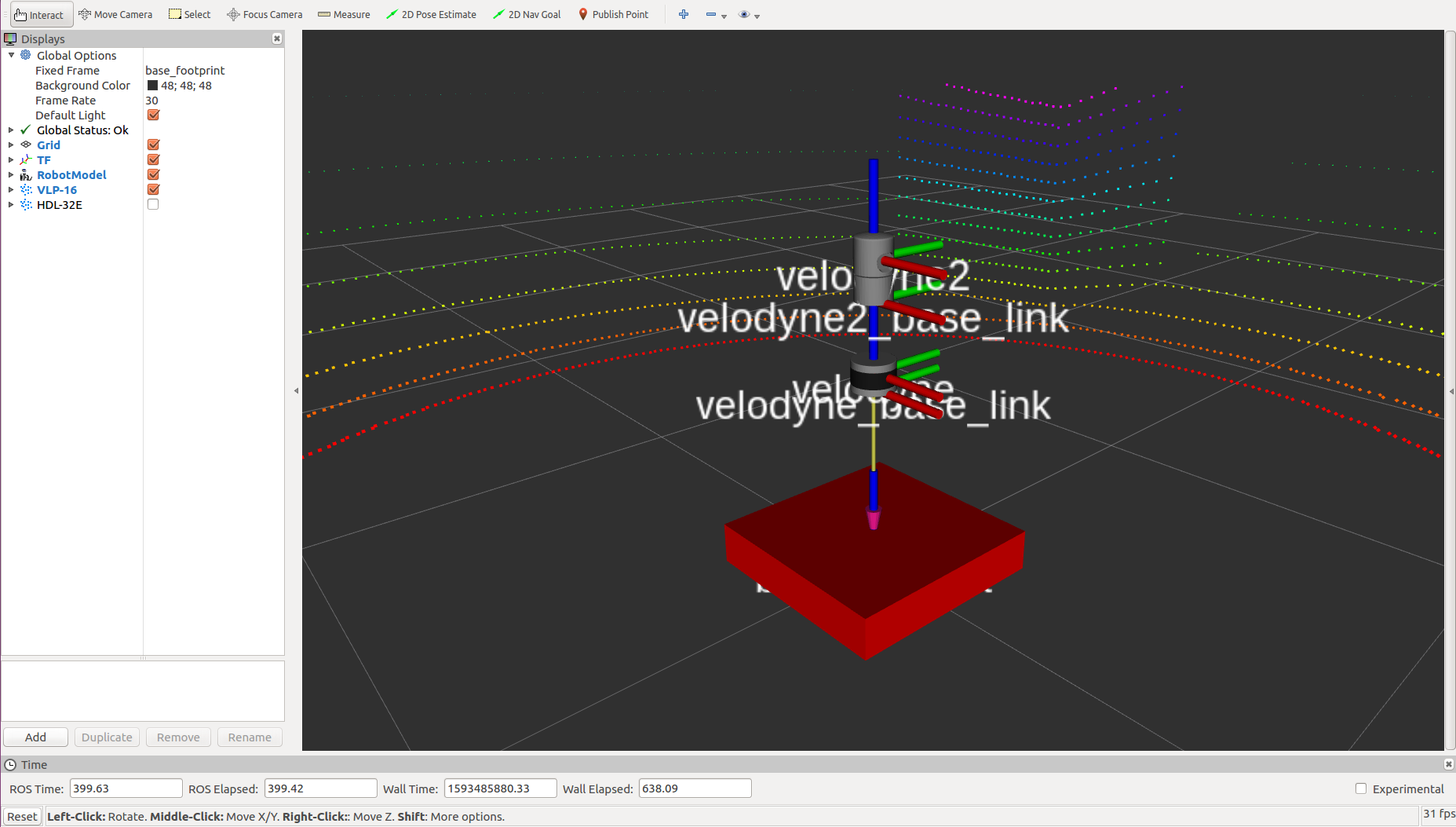
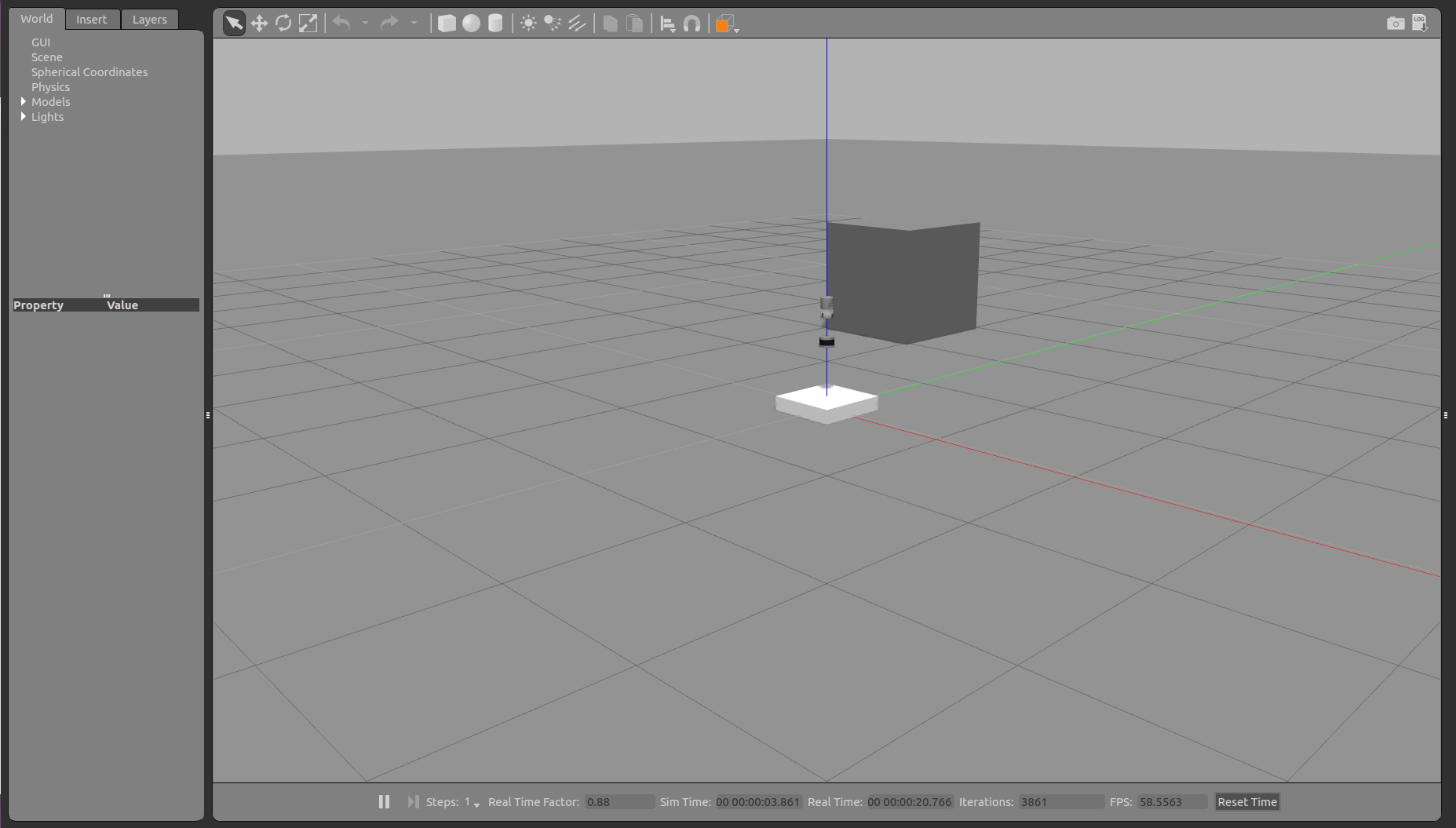
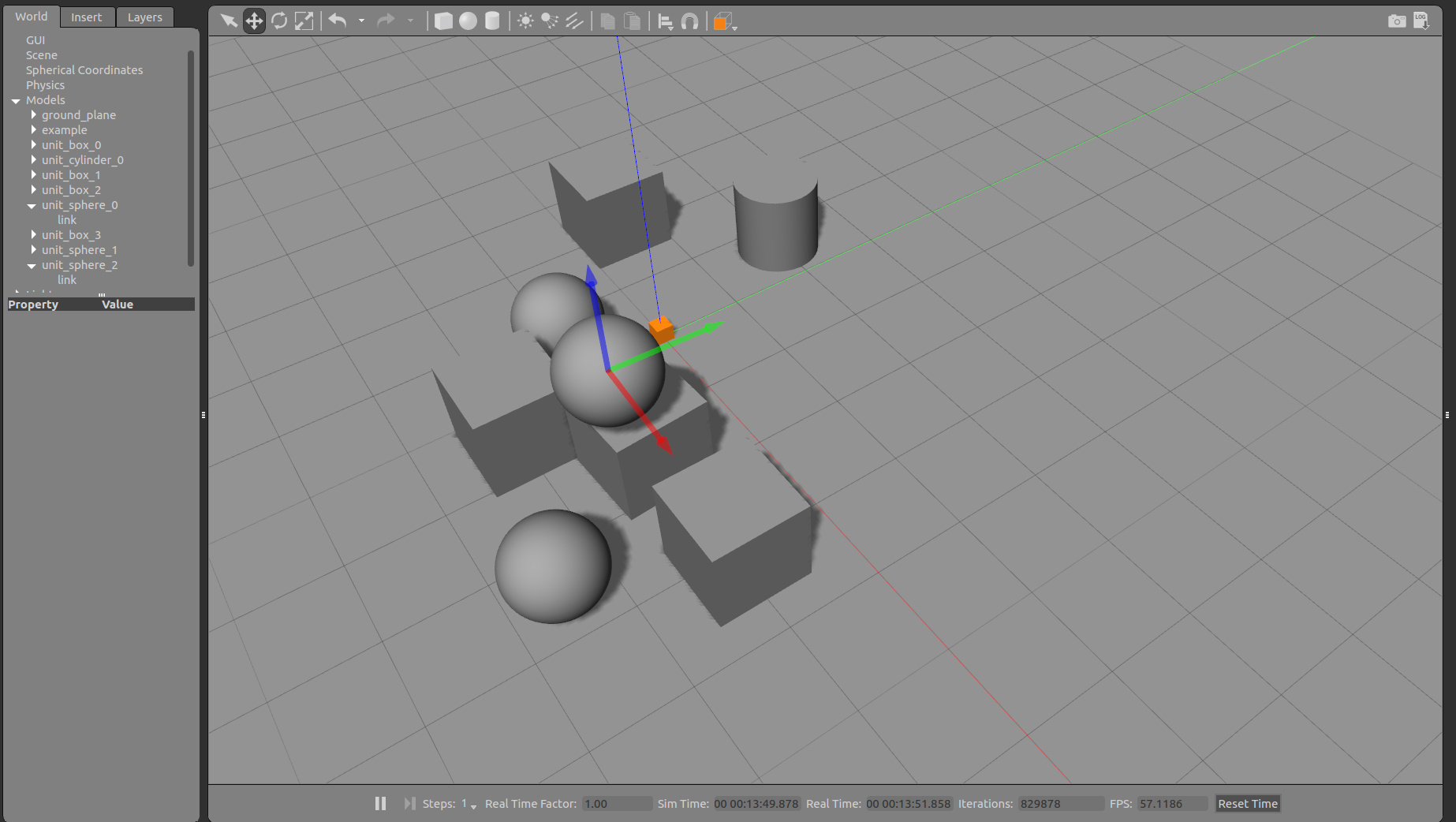
4.现在我们可以在Gazebo中添加一些障碍物
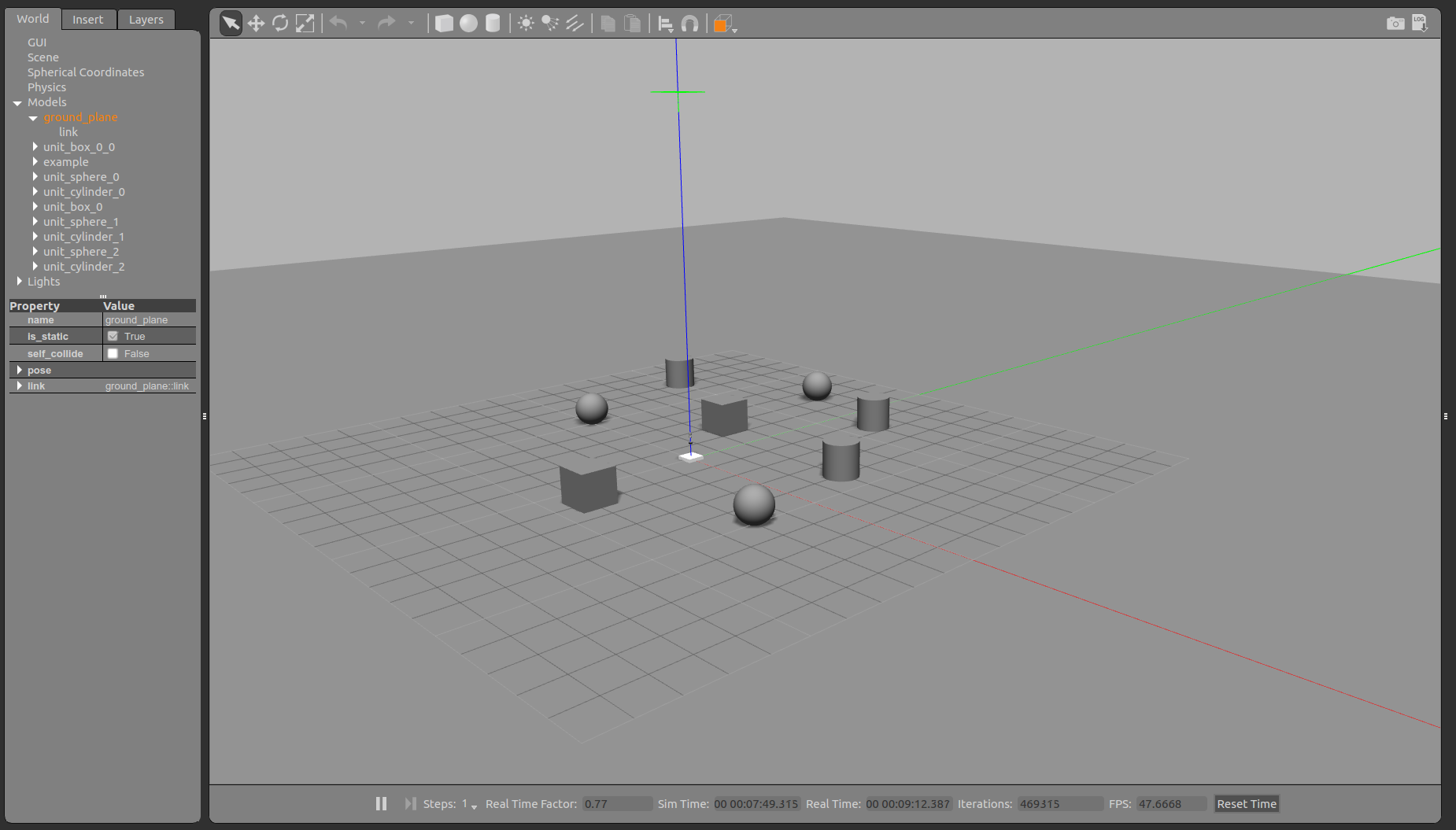
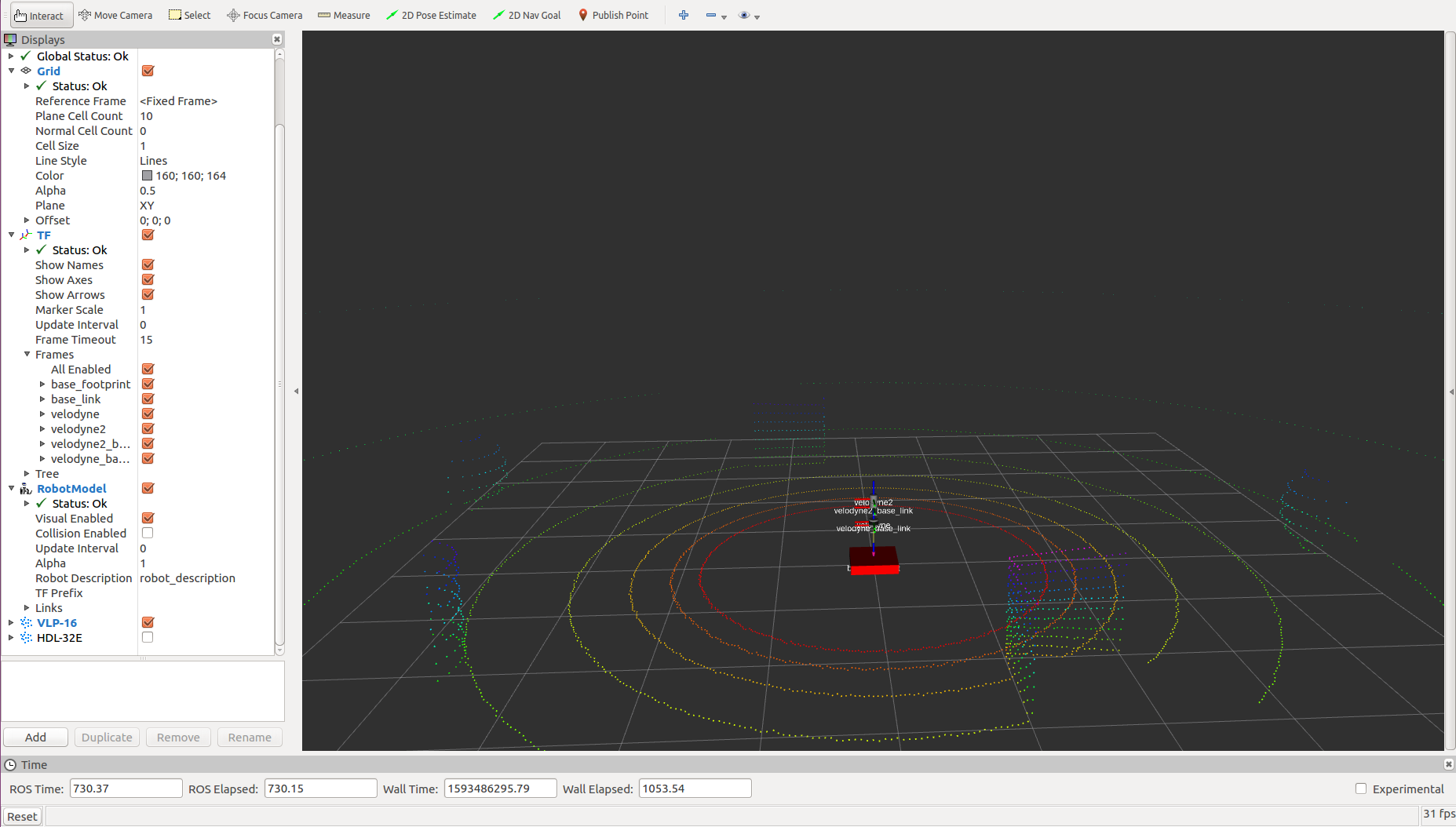
在RViz中可以看到这些障碍物的图像
上面介绍了如何对Velodyne传感器进行仿真,下面介绍接入Velodyne传感器:
5.安装velodyne ROS driver package—将velodyne数据转换为point cloud数据
$ sudo apt-get install ros-kinetic-velodyne
$ roslaunch velodyne_driver nodelet_manager.launch model:=32E
$ roslaunch velodyne_pointcloud cloud_nodelet.launch calibration:=~/calibration_file.yaml
二、laser scanner仿真
1.安装hector-gazebo-plugins
sudo apt-get install ros-kinetic-hector-gazebo-plugins
2.克隆教程包
git clone https://gitee.com/willardwey/ROS-Robotics-Projects.git
3.创建工作空间
mkdir -p ~/laserscanner_ws/src
cd ~/laserscanner_ws/src/
catkin_init_workspace
cd ..
4.将克隆的功能包chapter_10中的sensor_sim_gazebo复制到工作空间/laserscanner_ws/src中
5.编译启动
catkin_make
source devel/setup.bash
roslaunch sensor_sim_gazebo laser.launch
可以利用上方的工具栏,添加一些障碍物
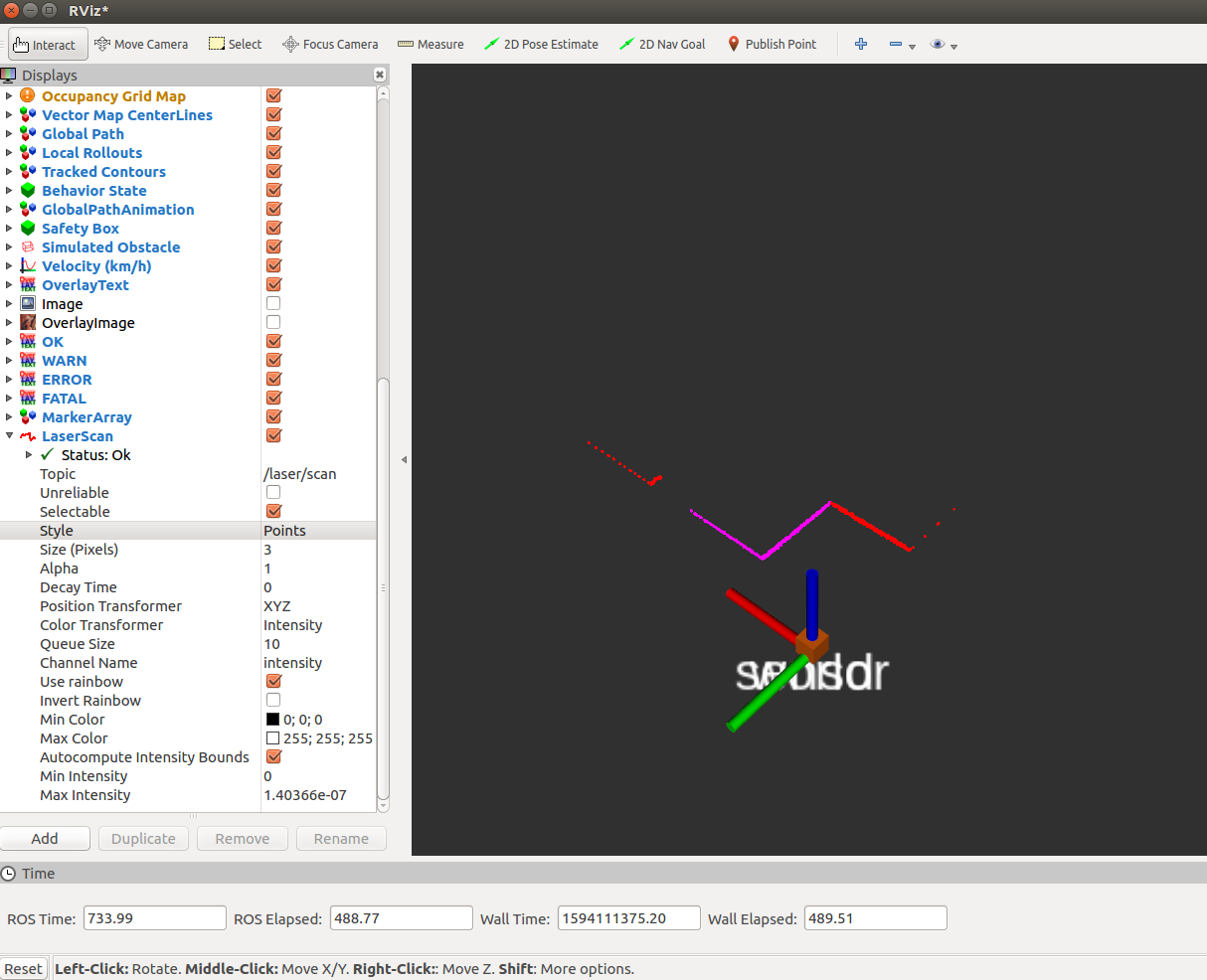
6.在rviz中可视化数据
另打开一个终端,输入rviz命令,启动可视化工具
点击左下角Add–选择LaserScan
Topic选择/laser/scan
style选择points
最后
以上就是勤恳硬币最近收集整理的关于【Gazebo】ROS和Gazebo进行自动驾驶传感器仿真Velodyne LIDAR、Laser scanner自动驾驶汽车传感器-ROS仿真一.Velodyne LIDAR仿真二、laser scanner仿真的全部内容,更多相关【Gazebo】ROS和Gazebo进行自动驾驶传感器仿真Velodyne内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复