一、基本算法
ξ ˙ i = u i , i = 1 , … , n dot{xi}_{i}=u_{i}, quad i=1, ldots, n ξ˙i=ui,i=1,…,n u i = − ∑ j = 1 n a i j ( t ) ( ξ i − ξ j ) , i = 1 , … , n u_{i}=-sum_{j=1}^{n} a_{i j}(t)left(xi_{i}-xi_{j}right), quad i=1, ldots, n ui=−j=1∑naij(t)(ξi−ξj),i=1,…,n ξ ˙ = − [ L n ( t ) ⊗ I m ] ξ dot{xi}=-left[mathcal{L}_{n}(t) otimes I_{m}right] xi ξ˙=−[Ln(t)⊗Im]ξ
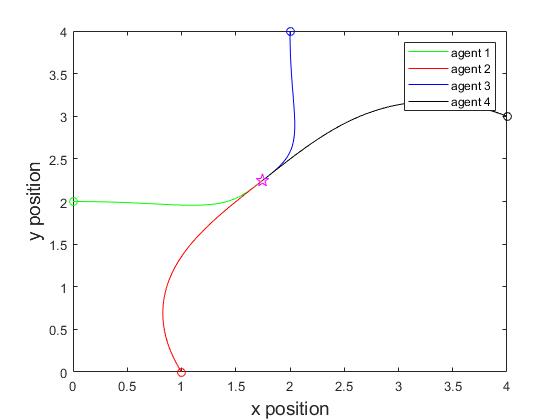
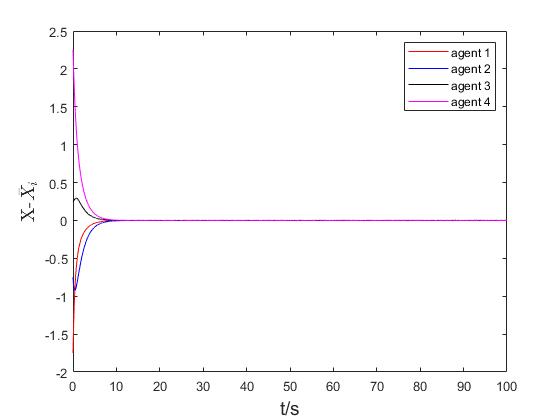
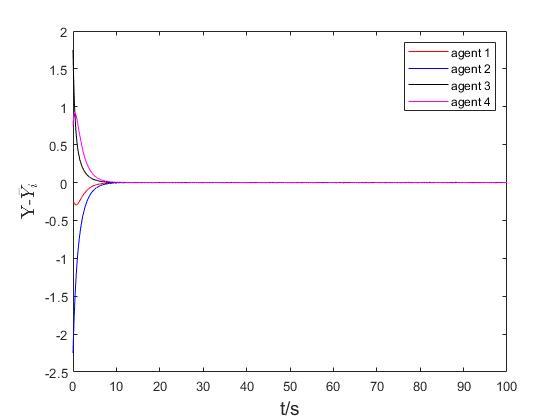
二、位置一致性控制
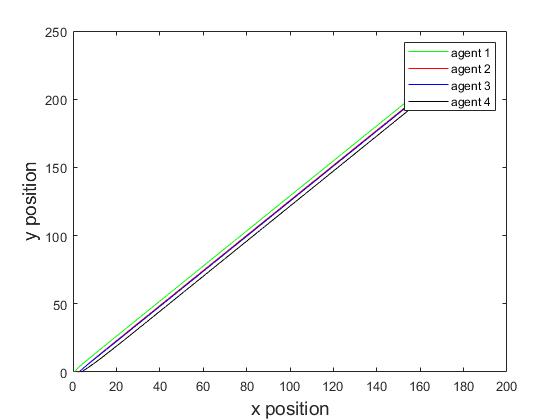
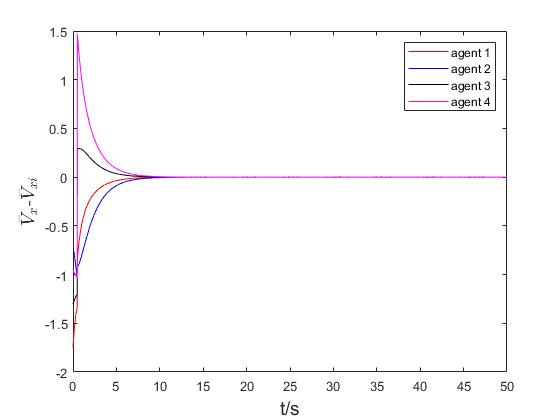
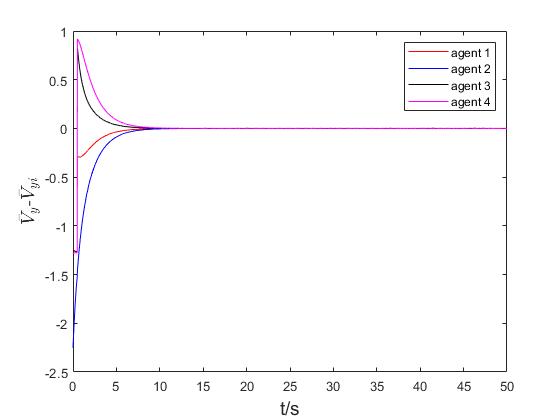
三、速度一致性控制
最后
以上就是失眠服饰最近收集整理的关于多智能体协同(1):一阶多智能固定拓扑下一致性控制的全部内容,更多相关多智能体协同(1)内容请搜索靠谱客的其他文章。








发表评论 取消回复