文章目录
- 前言
- 一、转速闭环直流调速系统
- 二、Matlab/Simulink仿真
- 2.1.仿真电路分析
- 2.2.仿真结果分析
- 总结
前言
变压调速是直流调速系统的主要调速方法,因此系统的硬件至少包含:可调直流电源和直流电机两部分。可调直流电源多采用直流PWM变换器,即DC-DC变流电路,将直流电变为另一固定电压或可调电压的直流电。上一章节可调直流电源采用降压斩波电路(Buck Choopper)实现直流无刷电机的转速闭环控制,本章节在不增加硬件电路的基础上实现直流无刷电机的转速闭环控制,即实现直流无刷电机的三相逆变电路即为可调直流电源。
有关增加Buck斩波电路的直流无刷电机转速闭环控制的Matlab/Simulink仿真请阅读:
直流无刷电机(BLDC)转速闭环调速系统及Matlab/Simulink仿真分析
有关直流无刷电机的调速原理请阅读:
直流无刷电机开环调速基于STM32F302R8+X-NUCLEO-IHM07M1(一)
一、转速闭环直流调速系统
有关转速闭环直流调速系统请阅读:
直流有刷电机转速、电流双闭环调速系统及Matlab/Simulink仿真分析
二、Matlab/Simulink仿真
2.1.仿真电路分析
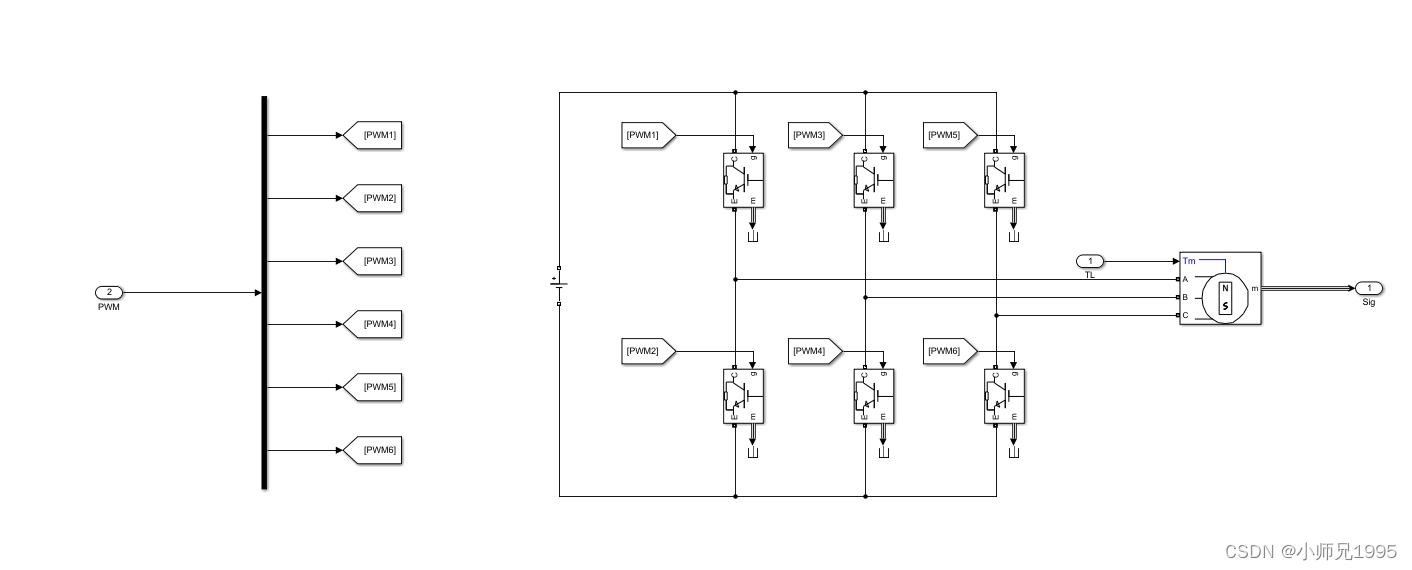
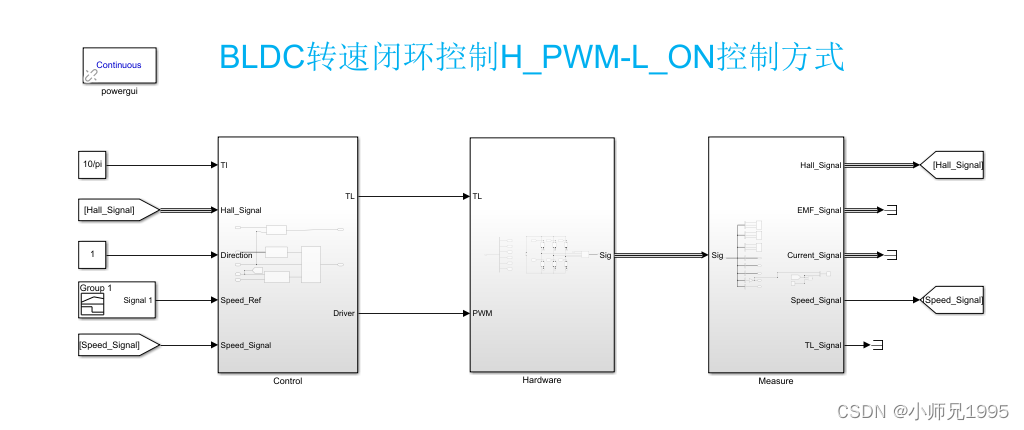
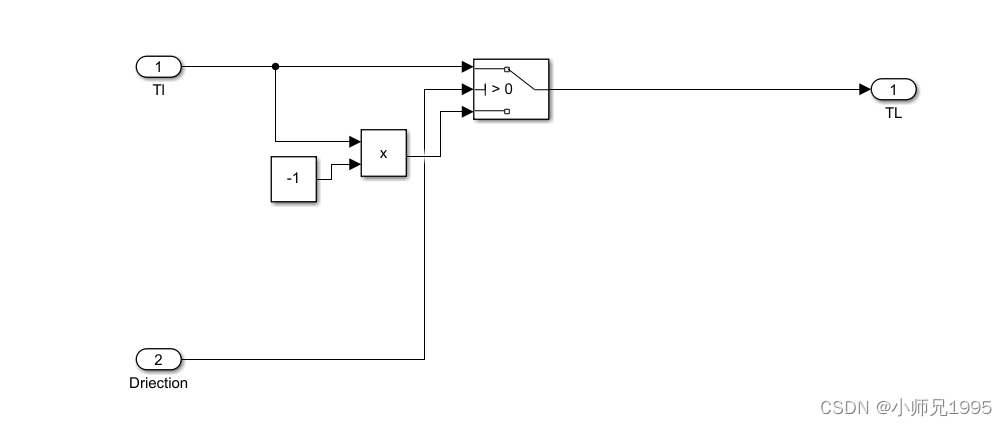
主电路:包括三相逆变电路及BLDC电机,BLDC电机的额定功率设置为1kw,额定电压500V,额定转速3000RMP,采用恒功率负载TL设置为10/π。
**
**
**
**
**
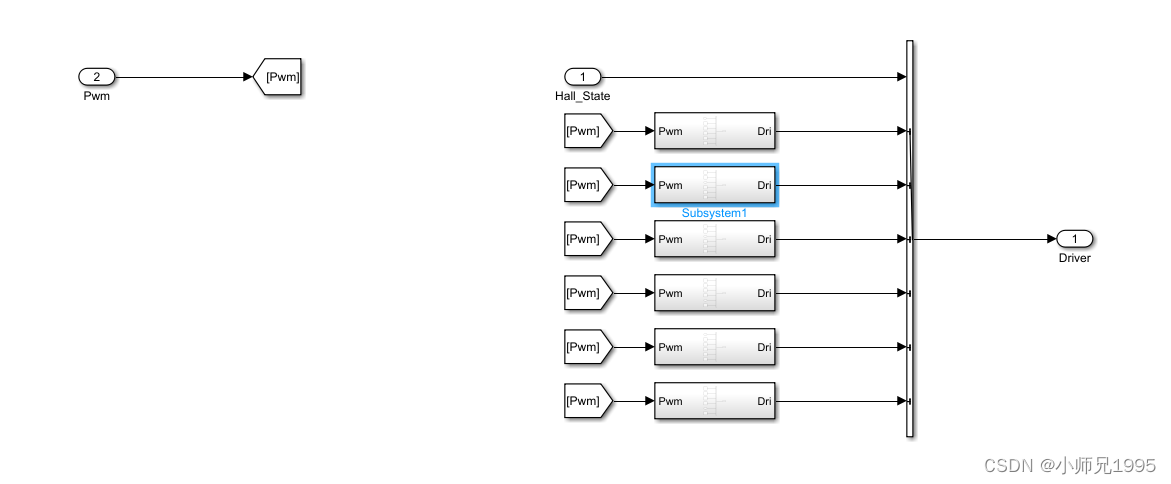
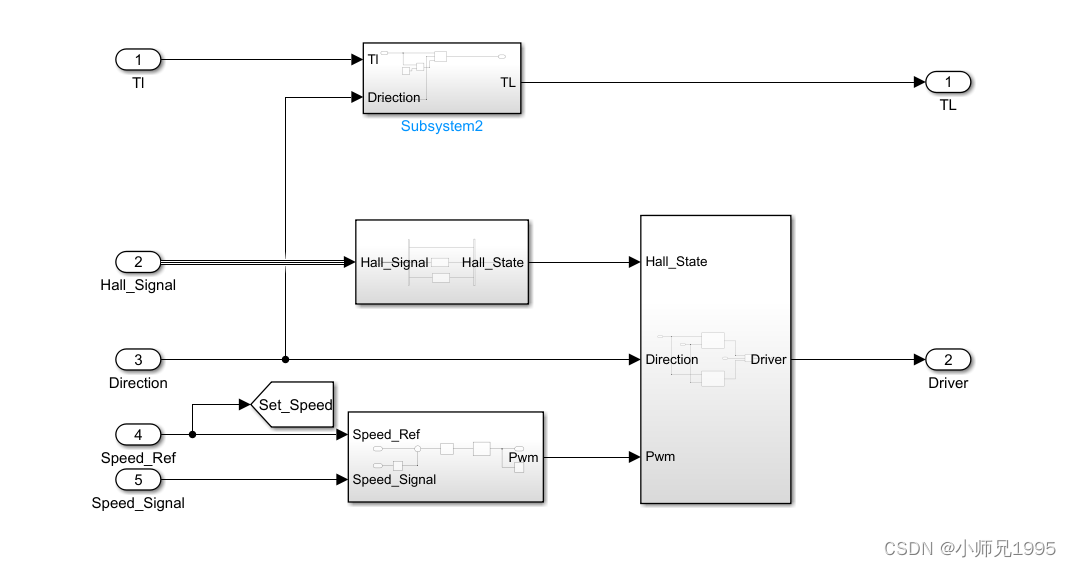
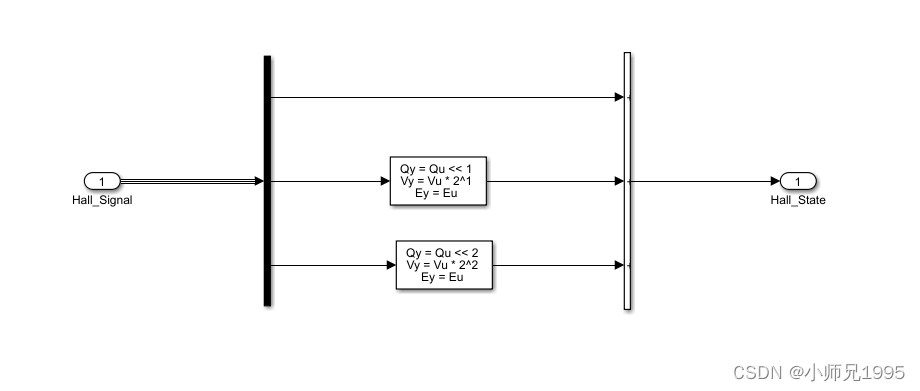
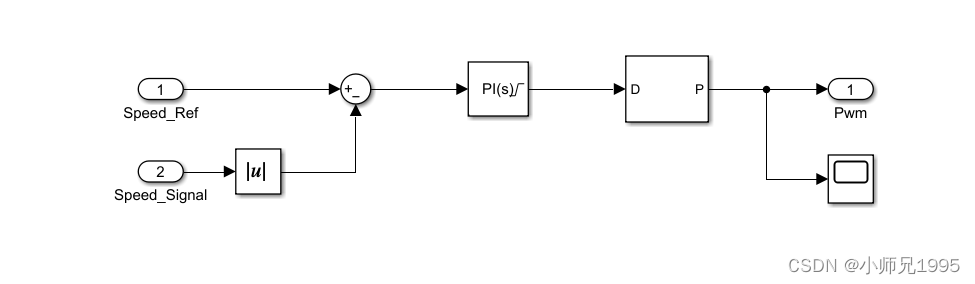
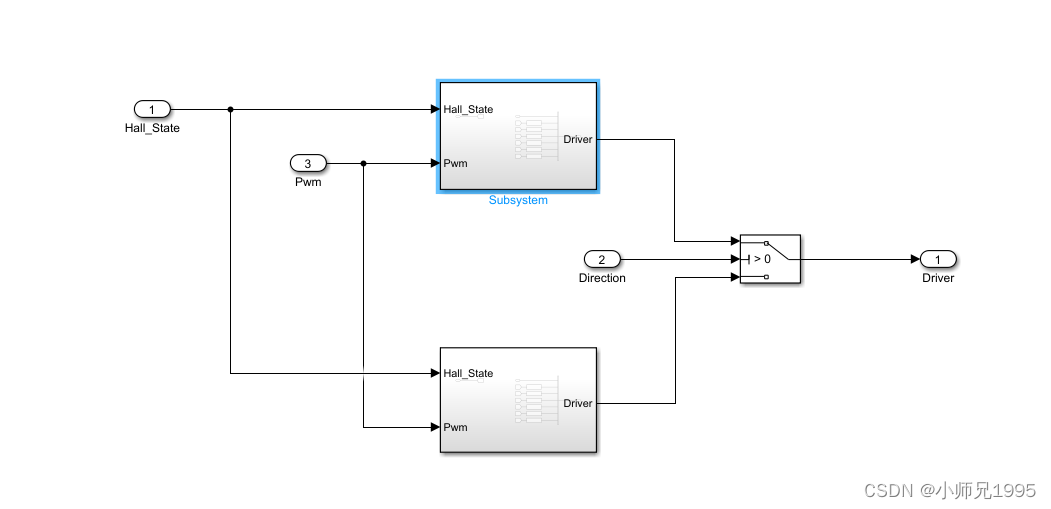
控制算法包括:霍尔信号处理、六步换相控制以及转速反馈的PI控制。根据霍尔信号判断转子当前所在的位置进而控制三相逆变电路的两两导通,根据设定Driection值进行电机正反转驱动;根据转速反馈值与转速设定值的误差调节占空比调节三相逆变电路的输出电压,从而调节电机转速。本次仿真采用H_PWM-L_ON的方式,即每个桥臂上管导通给PWM信号,下管导通直接给高电平信号,通过控制PWM占空比即可控制输出电压。
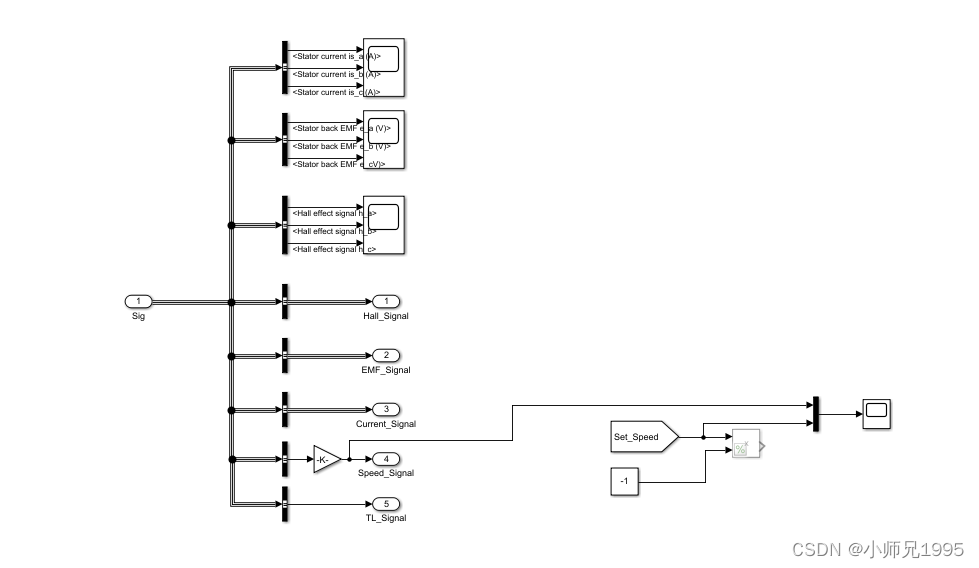
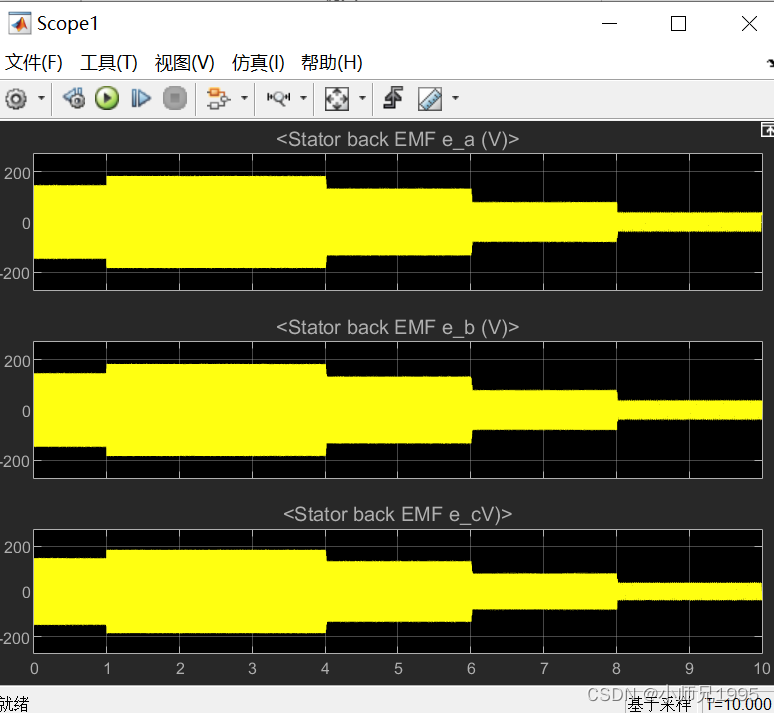
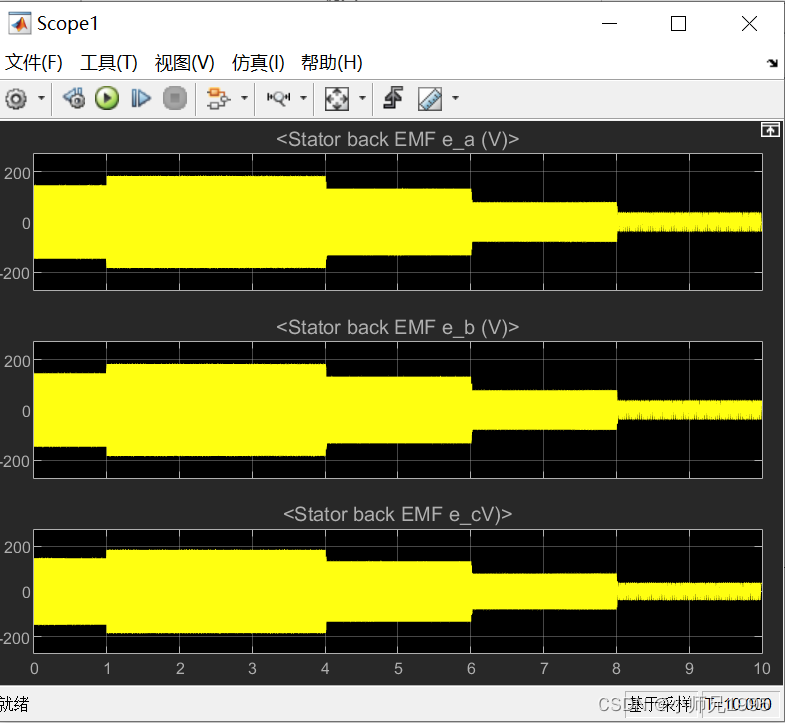
信号检测:检测电路的输出信号
2.2.仿真结果分析
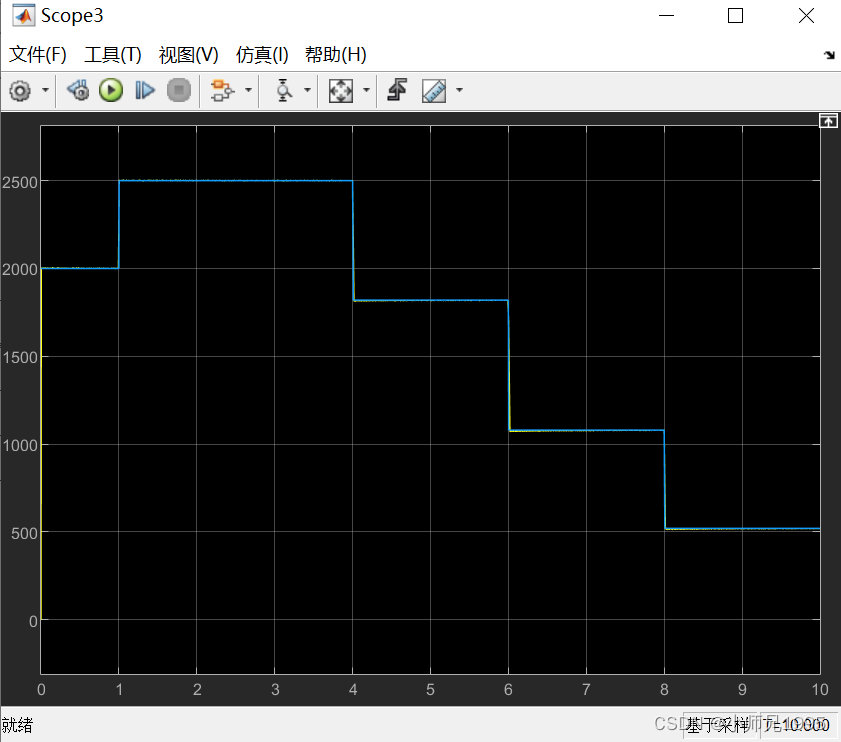
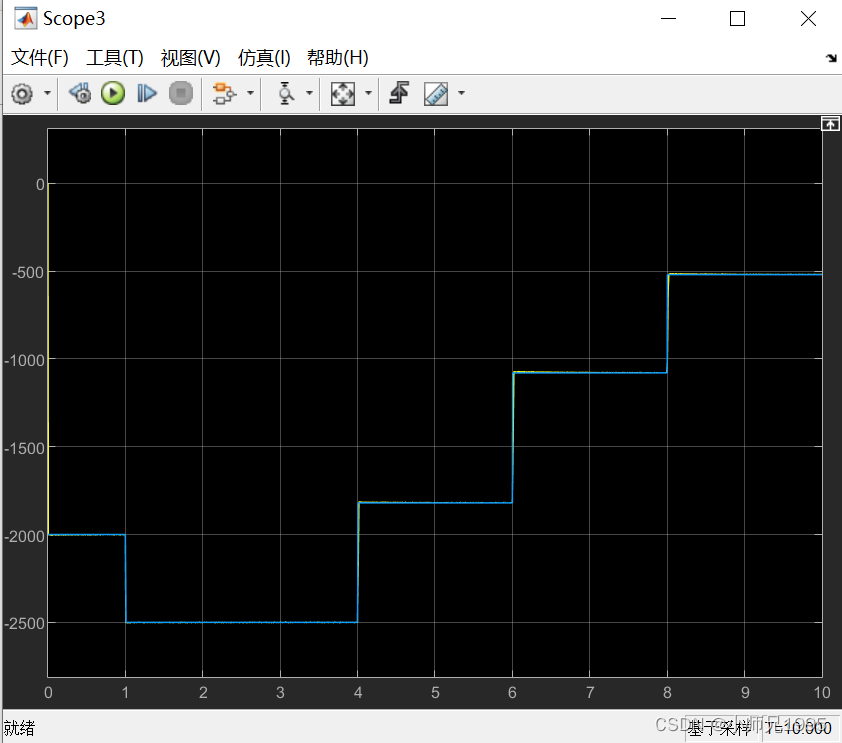
电机转速目标值设定:
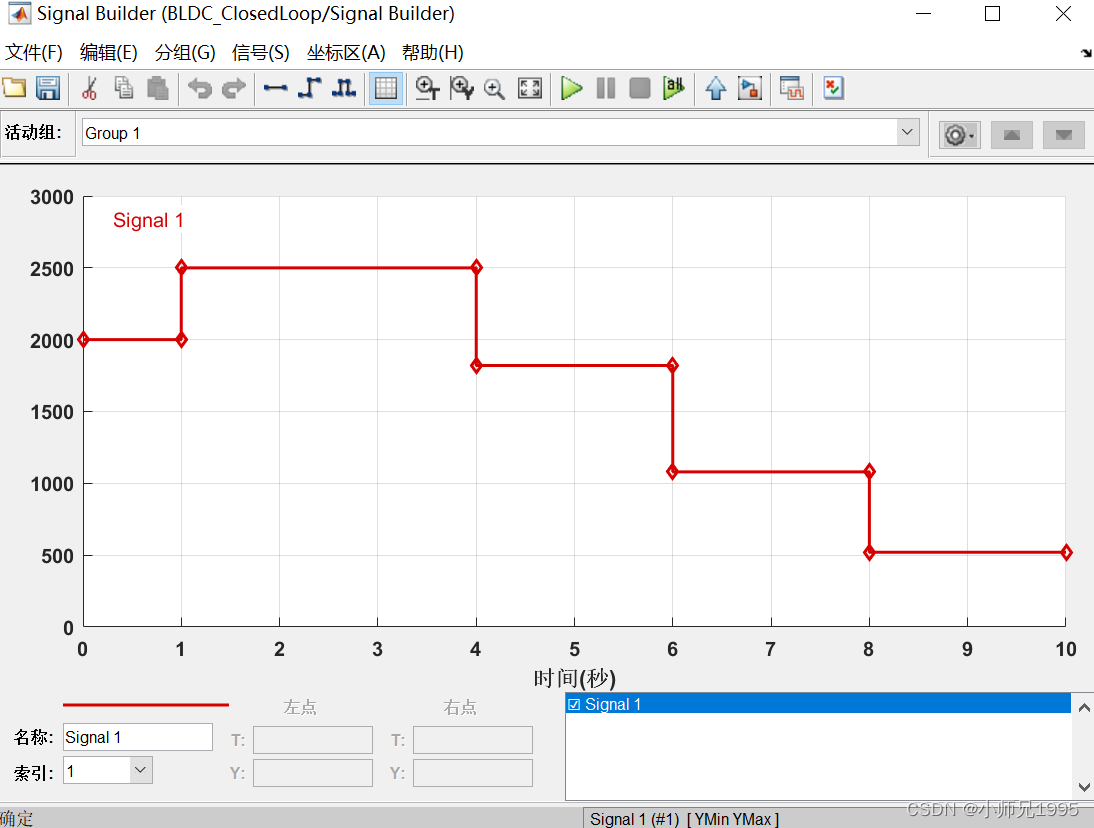
Direction设置为1,实现电机正转。
**
**
Direction设置为0,实现电机反转。
**
**
总结
在不增加额外附加电路的情况下采用H_PWM-L_ON的控制方式实现BLDC转速闭环控制,通过Matlab/Simulink进行仿真验证,为后续章节的分析奠定基础。
最后
以上就是甜蜜衬衫最近收集整理的关于直流无刷电机(BLDC)转速闭环调速系统及Matlab/Simulink仿真分析(二)前言一、转速闭环直流调速系统二、Matlab/Simulink仿真总结的全部内容,更多相关直流无刷电机(BLDC)转速闭环调速系统及Matlab/Simulink仿真分析(二)前言一、转速闭环直流调速系统二、Matlab/Simulink仿真总结内容请搜索靠谱客的其他文章。








发表评论 取消回复