从零开始做自动驾驶定位(二): 数据集 - 任乾的文章 - 知乎 https://zhuanlan.zhihu.com/p/104875159
浅浅总结实践一下:
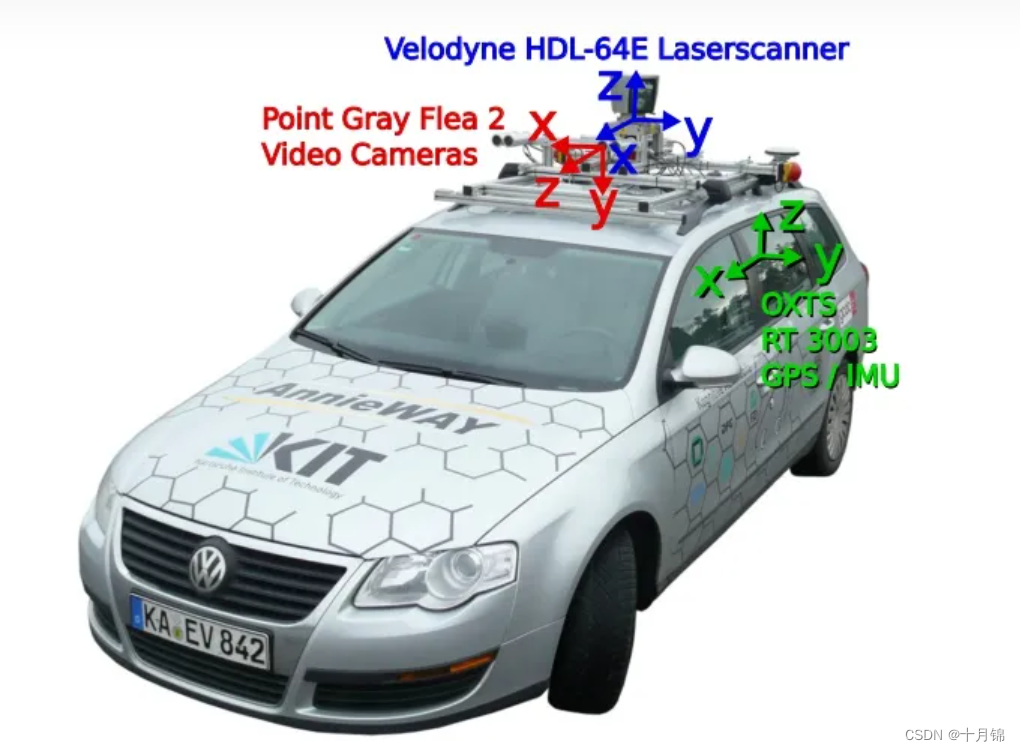
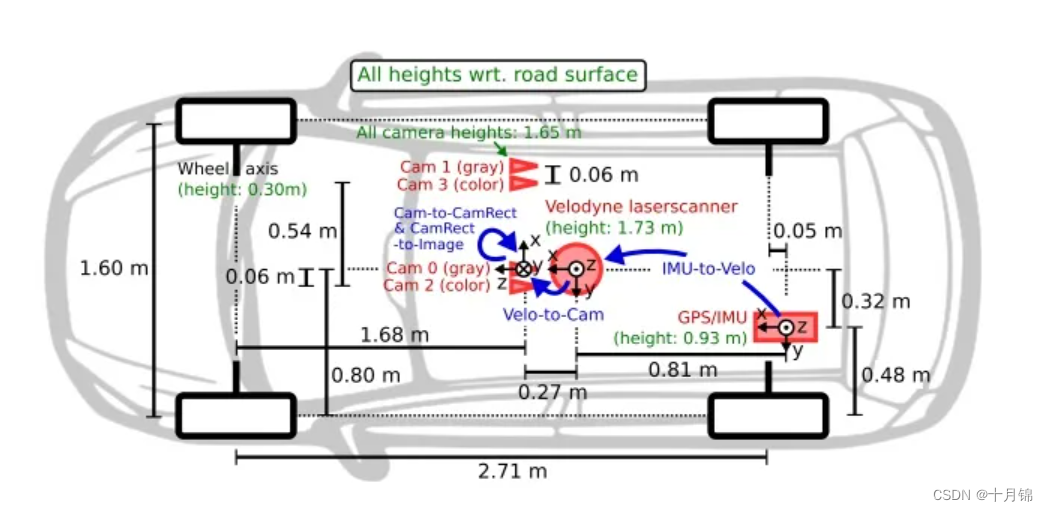
1.采集平台的组成:64线激光雷达(车顶中心)+四个摄像头(激光雷达两侧没测一个彩色一个灰色)+组合导航系统(雷达左后方,输出RTK/IMU组合导航结果。经纬度、姿态、IMU原始数据)。由位置信息可以得到各个传感器之间以及他们和车的相对位移关系。
2. RawDate数据:RTK+IMU+激光雷达+摄像头 的数据和他们之间标定的关系,时间戳以对应好。
3.在ROS环境中需要将KITTI数据集转化成数据包
RawDate原始数据:某sync.zip+某calib.zip,并列放置。
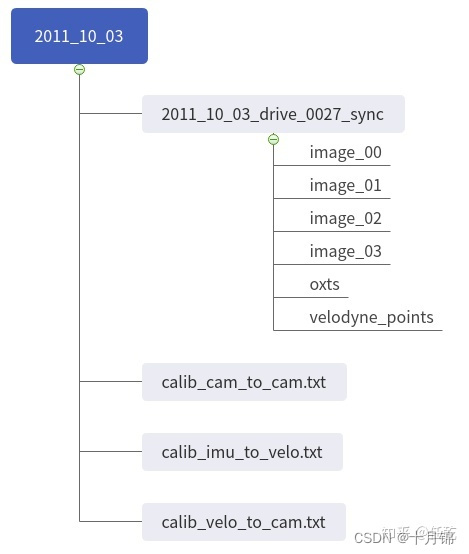
使用kitti2bag转换包指令如下:
kitti2bag -t 2011_10_03 -r 0027 raw_synced可得bag包用于测评。
最后
以上就是愉快鱼最近收集整理的关于一、数据集的全部内容,更多相关一、数据集内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复