LaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving
摘要
本文提出了一种基于激光雷达数据的自动驾驶三维目标检测算法LaserNet。效率来自于在传感器的原始范围视图中处理激光雷达数据,在该视图中,输入数据自然紧凑。在范围视图中操作涉及到众所周知的学习挑战,包括遮挡和尺度变化,但它也提供了基于如何捕获传感器数据的上下文信息。我们的方法使用一个完全卷积的网络来预测三维盒子上每个点的多模态分布,然后它有效地融合这些分布来生成每个对象的预测。实验表明,将每个检测建模为一个分布而不是一个确定的盒,可以获得更好的整体检测性能。基准测试结果表明,该方法的运行时间明显低于其他最新的检测器,并且与具有足够数据以克服范围视图训练挑战的大型数据集相比,该方法获得了最新的性能。
贡献
在这项工作中,我们提出了一种有效的方法来学习一个端到端的概率三维目标检测器,当有足够的训练数据时,我们可以在较低的运行时间内获得最新的检测性能。我们的方法是有效的,因为我们使用一个小而密集的范围图像,而不是一个大而稀疏的鸟瞰图像。我们提出的方法不仅为每个检测产生一个类概率,而且在检测边界盒上产生一个概率分布。据我们所知,我们提出的方法是第一个通过模拟包围盒角点的分布来捕捉检测的不确定性。通过估计检测的精度,我们的方法使全自动驾驶系统中的下游部件能够在具有不同不确定性的物体周围表现出不同的行为。
方法
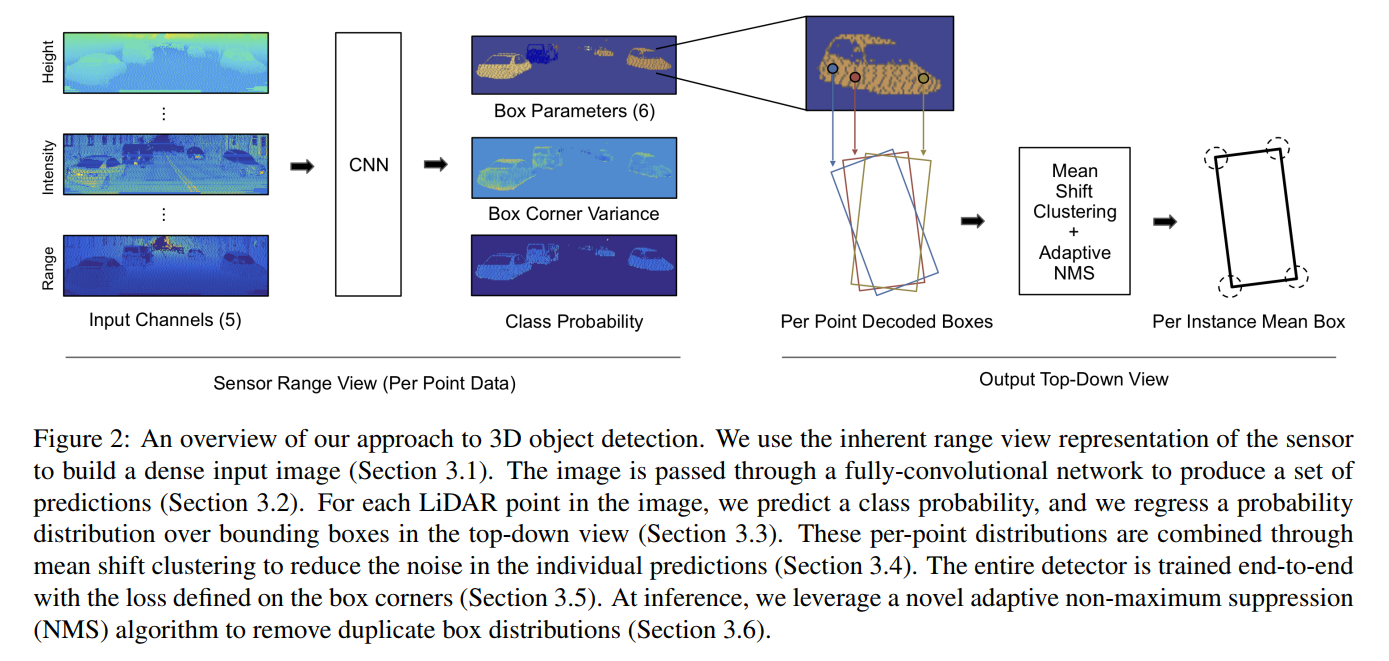
图2:本3D目标检测方法概述。我们使用传感器固有的视场范围表示来构建稠密的输入图像(第3.1节)。图像通过全卷积网络以产生一组预测(第3.2节)。对于图像中的每个LiDAR点,我们预测一个类概率,并在俯视图中对边界框中的概率分布进行回归(第3.3节)。这些每点分布通过均值偏移聚类相结合,以减少各个预测中的噪声(第3.4节)。对整个检测器端到端地进行训练,并在边界框上定义损失(第3.5节)。在推论中,我们利用一种新颖的自适应非最大抑制(NMS)算法来消除重叠的边框中的分布(第3.6节)。
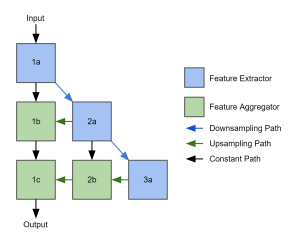
图3:我们的深层聚合网络架构。列表示不同的分辨率级别,行表示聚合阶段。
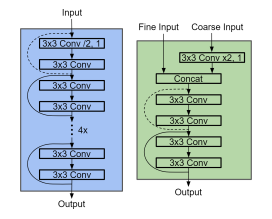
图4:我们的特征提取模块(左)和特征聚合模块(右)。这些模块是残差网络。虚线表示执行卷积以重建特征图。
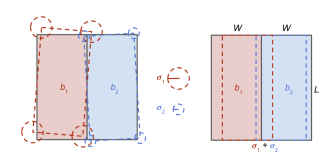
图5:我们的自适应非最大抑制(NMS)技术的图示。考虑一对并排放置的车辆。左侧的虚线轮廓描绘了我们的方法生成的一组可能的预测。为了确定边界框是否包含了唯一对象,我们利用预测的方差(如中心所示)来估计最坏情况下的重叠,如右图所示。在此示例中,将保留两个边界框,因为实际重叠小于估计的最坏情况重叠。
主要结果
![[点击进入看图评论]](https://www.shuijiaxian.com/files_image/20230405/113001571916.png)
图6:显示在训练集和验证集上的边界框上的预测分布的校准的图。完美校准的分布对应于具有单位斜率的线(图中的虚线)。我们观察到该模型无法学习KITTI的概率分布,而它能够学习更大的ATG4D上的分布。
![[点击进入看图评论]](https://www.shuijiaxian.com/files_image/20230405/113001581237.png)
表1:显示了我们在验证集上与其他最先进方法相比的结果;表2:对ATG4D数据集进行模型简化测试结果;表3:比较了我们的方法(在NVIDIA 1080Ti GPU)和KITTI上的现有方法之间的运行时性能;表4:我们的方法在这个小型数据集上与目前最先进的俯视角检测效果比较。
最后
以上就是义气秋天最近收集整理的关于每天一篇论文 320/365 LaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving的全部内容,更多相关每天一篇论文内容请搜索靠谱客的其他文章。








发表评论 取消回复