基于V2X多智能车辆编队协同控制仿真分析入门
在车联网环境下,车辆可以通过V2V通信在-定范围之内获取周围车辆的相关信息(如速度、位置),这能够促使车辆之间实现高效的协作合作方式,有利于实现车辆的编队控制。而车辆编队控制是车联网环境下车辆协调控制中一种重要的行驶行为,是车车间协作与配合基础上的一个车路协同系统的重要研究方向之一。车辆编队控制包括纵向控制盒横向控制。其中纵向控制已经有一定的应用,目前已有不少科研机构和单位进行了现场真车试验,对车辆队列控制系统进行了相关的测试和检验,例如美国的PATH项目,欧洲的SARTRE项目。通过上述工程试验和研究表明,车辆队列控制有以下方面的优势。
●车辆队列行驶能够提高道路通行能力。通过减少车车间距,在不增加额外车道的前提下,提高了道路车辆的密度,减缓交通拥堵压力;
●车辆队列行驶能 够提升道路行车安全。通过实时共享车辆间状态信息,车辆能够更快速、准确的作出决策,避免危险的发生。并且车辆间保持安全间距和速度,避免追尾等事故;
●车辆队列行驶能够 有效减少环境污染。通过车辆的队列行驶的空气动力学及其仿真的分析数据中发现,车辆队列行驶可有效地降低车辆所受到的空气阻力;
●车辆队列行 驶能够发挥车辆协同合作的作用和优势。在一些特殊的领域,需要多个车辆组成车辆队列或其他特定形式的编队,通过相互配合和协作,进而完成探险、救援、巡逻等目的任务。
多自主车辆队列协同控制是1ITS发展过程中的重要研究方向,已成为控制、通信以及汽车等领域的研究热点,它指多自主车辆在合适控制算法的作用下,多辆车通过车辆间通信,以期望的车辆间距和相同的速度互相配合安全到达同一目的地的协调运动回。对多自主车辆进行队列控制,不仅可以有效降低整个多自主车辆队列在行驶过程中受到的空气阻力,实现降低燃油消耗的目标”,而且可以使多自主车辆队列中的车辆控制在较小的安全的车辆间距内,增加道路通行量。
在多自主车辆队列协同控制研究中,需要关注多自主车辆队列的内部稳定性和弦稳定性。内部稳定性是指多自主车辆队列保持队形的能力,要求系统特征多项式的所有特征值均具有负实部。弦稳定性是指当领导车辆速度突然发生变化,相邻车辆之间的速度和位置误差向多自主车辆队列队尾传播时呈衰减趋势,如同水波向四周传播时,波纹越来越小。当多自主车辆队列不满足弦稳定时,不仅会对跟随车辆的安全可靠运行带来风险,而且会在没有明显原因的情况下造成交通堵塞。因而,需要同时研究多自主车辆队列的内部稳定性和弦稳定性。作为控制领域的研究热点之一,多自主车辆队列可以看作是由多个单一车辆节点,通过车辆节点间的相互作用,进而互相耦合构成的动态系统。同时,多自主车辆队列中各个车辆之间进行信息传递时,由于通信带宽限制等原因,车辆之间的通信会存在一定的延时,延时的大小会严重影响多自主车辆队列的内邮稳定性和弦稳定性。多智能体系统和多自主车辆队列有许多相通之处,因此,从多智能体系统的视角出发,研究具有时延约束的多自主车辆队列的内部稳定性和弦稳定性,有重要的研究意义和很大的应用前景。
由于多智能体是非常热门的研究领域,但是基础的理论都是想通的,只要把基础的理论彻底深入研究清楚,复杂的系统不过是在基础理论上考虑的因素更多一些而已。本文将聚焦基础理论的介绍,同时与智能车辆联系起来一起分析。把多智能体系统的理论应用在智能网联汽车上,实现车辆协同控制。
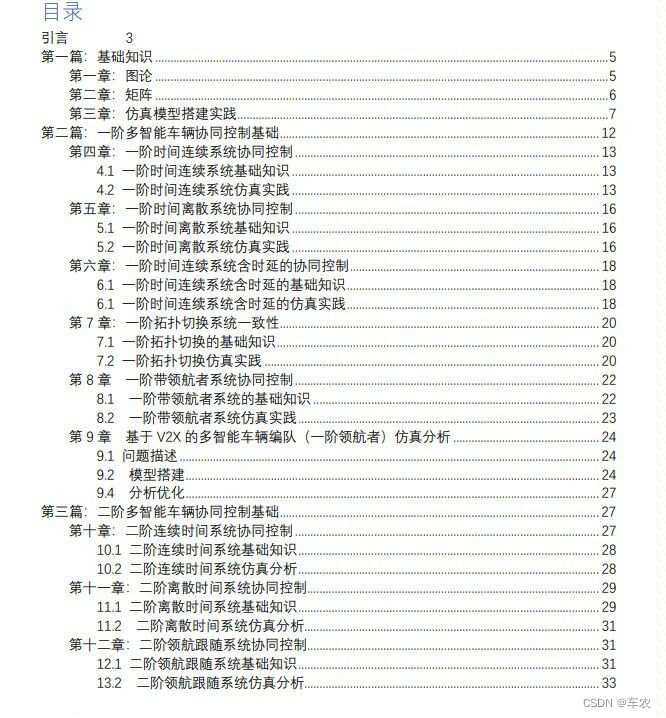
入门的资料采用逐章节介绍,先理论后实践,通过搭建模型来深入了解理论的内涵,这对于了解基础入门和以后做更加复杂的模型有一定的帮助。本入门的资料采用的结构如下;

最后
以上就是文艺嚓茶最近收集整理的关于基于V2X多智能车辆编队协同控制仿真分析入门的全部内容,更多相关基于V2X多智能车辆编队协同控制仿真分析入门内容请搜索靠谱客的其他文章。








发表评论 取消回复