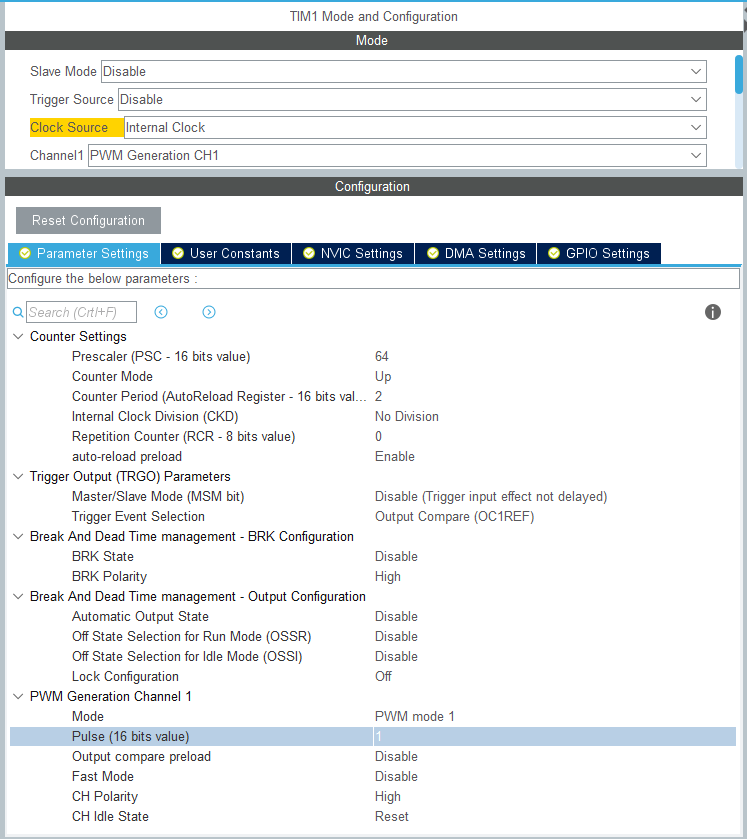
这里我使用的是定时器1发送脉冲,定时器4记录脉冲个数,所以定时器1工作在主模式,定时器4工作在从模式。
定时器1主要是设置输出的触发事件,这里我们选择OC1REF
这里需要注意一下,配置的时候定时器的arr不能设置为0,不然无法输出脉冲。
先上定时器1配置图
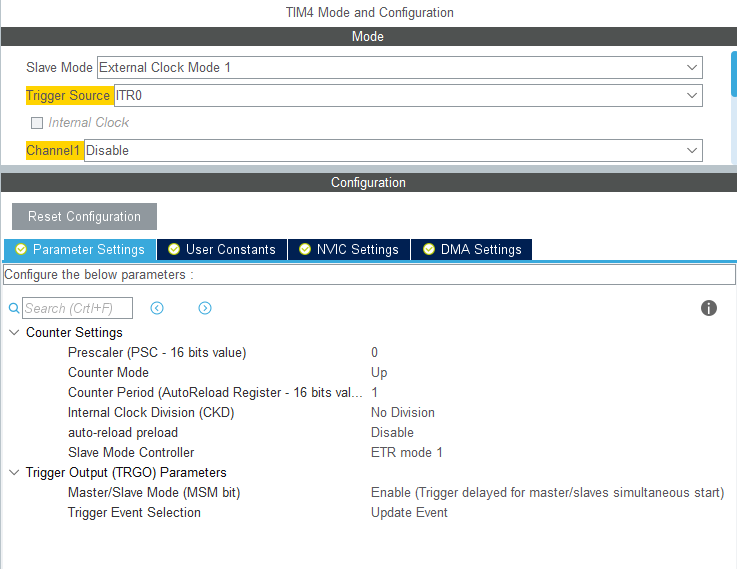
然后就是定时器4了
因为使用的是从模式,所以在这里我们选择“外部时钟模式1”
还要选触发源,这里我们选择“ITR0”,也就是我们设定的定时器1的事件输出。
下面是配置图:
以上就是配置了,下面粘贴一下代码,其实就是配置生成的,但是也需要看一下,有什么不同
定时器1主模式:
void MX_TIM1_Init(void)
{
LL_TIM_InitTypeDef TIM_InitStruct = {0};
LL_TIM_OC_InitTypeDef TIM_OC_InitStruct = {0};
LL_TIM_BDTR_InitTypeDef TIM_BDTRInitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
/* Peripheral clock enable */
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_TIM1);
TIM_InitStruct.Prescaler = 64;
TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
TIM_InitStruct.Autoreload = 2;
TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
TIM_InitStruct.RepetitionCounter = 0;
LL_TIM_Init(TIM1, &TIM_InitStruct);
LL_TIM_EnableARRPreload(TIM1);
LL_TIM_SetClockSource(TIM1, LL_TIM_CLOCKSOURCE_INTERNAL);
LL_TIM_OC_EnablePreload(TIM1, LL_TIM_CHANNEL_CH1);
TIM_OC_InitStruct.OCMode = LL_TIM_OCMODE_PWM1;
TIM_OC_InitStruct.OCState = LL_TIM_OCSTATE_DISABLE;
TIM_OC_InitStruct.OCNState = LL_TIM_OCSTATE_DISABLE;
TIM_OC_InitStruct.CompareValue = 1;
TIM_OC_InitStruct.OCPolarity = LL_TIM_OCPOLARITY_HIGH;
TIM_OC_InitStruct.OCNPolarity = LL_TIM_OCPOLARITY_HIGH;
TIM_OC_InitStruct.OCIdleState = LL_TIM_OCIDLESTATE_LOW;
TIM_OC_InitStruct.OCNIdleState = LL_TIM_OCIDLESTATE_LOW;
LL_TIM_OC_Init(TIM1, LL_TIM_CHANNEL_CH1, &TIM_OC_InitStruct);
LL_TIM_OC_DisableFast(TIM1, LL_TIM_CHANNEL_CH1);
LL_TIM_SetTriggerOutput(TIM1, LL_TIM_TRGO_OC1REF); //注意这一句
LL_TIM_DisableMasterSlaveMode(TIM1);
LL_TIM_OC_DisablePreload(TIM1, LL_TIM_CHANNEL_CH1);
TIM_BDTRInitStruct.OSSRState = LL_TIM_OSSR_DISABLE;
TIM_BDTRInitStruct.OSSIState = LL_TIM_OSSI_DISABLE;
TIM_BDTRInitStruct.LockLevel = LL_TIM_LOCKLEVEL_OFF;
TIM_BDTRInitStruct.DeadTime = 0;
TIM_BDTRInitStruct.BreakState = LL_TIM_BREAK_DISABLE;
TIM_BDTRInitStruct.BreakPolarity = LL_TIM_BREAK_POLARITY_HIGH;
TIM_BDTRInitStruct.AutomaticOutput = LL_TIM_AUTOMATICOUTPUT_DISABLE;
LL_TIM_BDTR_Init(TIM1, &TIM_BDTRInitStruct);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_GPIOA);
/**TIM1 GPIO Configuration
PA8 ------> TIM1_CH1
*/
GPIO_InitStruct.Pin = STEP_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
LL_GPIO_Init(STEP_GPIO_Port, &GPIO_InitStruct);
}定时器4从模式:
void MX_TIM4_Init(void)
{
LL_TIM_InitTypeDef TIM_InitStruct = {0};
/* Peripheral clock enable */
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM4);
/* TIM4 interrupt Init */
NVIC_SetPriority(TIM4_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(),0, 0));
NVIC_EnableIRQ(TIM4_IRQn);
TIM_InitStruct.Prescaler = 0;
TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
TIM_InitStruct.Autoreload = 1;
TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
LL_TIM_Init(TIM4, &TIM_InitStruct);
LL_TIM_DisableARRPreload(TIM4);
LL_TIM_SetTriggerInput(TIM4, LL_TIM_TS_ITR0); //注意这一句
LL_TIM_SetClockSource(TIM4, LL_TIM_CLOCKSOURCE_EXT_MODE1); //注意这一句
LL_TIM_DisableIT_TRIG(TIM4);
LL_TIM_DisableDMAReq_TRIG(TIM4);
LL_TIM_SetTriggerOutput(TIM4, LL_TIM_TRGO_UPDATE);
LL_TIM_DisableMasterSlaveMode(TIM4);
}以上就是初始化代码,在这之后我们还要去检测脉冲,怎么检查呢,在定时器4中,我设置了更新中断,当脉冲发完之后会触发更新中断,在这里面可以关掉定时器。
void TIM4_IRQHandler(void)
{
/* USER CODE BEGIN TIM4_IRQn 0 */
if(LL_TIM_IsActiveFlag_UPDATE(TIM4) != RESET) //TIM_IT_Update
{
LL_TIM_ClearFlag_UPDATE(TIM4); // 清除中断标志位
LL_TIM_DisableCounter(TIM1); //关闭定时器
LL_TIM_DisableCounter(TIM4); //关闭定时器
LL_TIM_DisableIT_UPDATE(TIM4); //关闭TIM4更新中断
}
/* USER CODE END TIM4_IRQn 0 */
/* USER CODE BEGIN TIM4_IRQn 1 */
/* USER CODE END TIM4_IRQn 1 */
}最后就是将这两个定时器的功能封装起来了,代码如下:
void Pulse_output(uint32_t Cycle,uint32_t PulseNum)
{
LL_TIM_SetAutoReload(TIM4,PulseNum); //设置脉冲数量
LL_TIM_ClearFlag_UPDATE(TIM4); //清除中断标志位
LL_TIM_EnableIT_UPDATE(TIM4); //使能更新中断
LL_TIM_EnableCounter(TIM4); //使能TIM4(从定时器)
LL_TIM_SetAutoReload(TIM1,Cycle); //设置频率
LL_TIM_OC_SetCompareCH1(TIM1,Cycle/2); //设置占空比
LL_TIM_EnableCounter(TIM1); //使能定时器1
}需要特别注意的是,高级定时器需要使能主输出,也就是 LL_TIM_EnableAllOutputs(TIM1);
还有一个就是使用的PWM通道使能: LL_TIM_CC_EnableChannel(TIM1, LL_TIM_CHANNEL_CH1);
这两个配置软件没有帮我们配置,需要手动加上。
最后在想要发脉冲的地方调用就好了,程序可以发脉冲驱动步进电机转到指定位置,但是没有用示波器测量,水平有限,如果有错误欢迎指出。
最后
以上就是精明手套最近收集整理的关于LL库实现STM32使用定时器主从模式输出指定数量脉冲的全部内容,更多相关LL库实现STM32使用定时器主从模式输出指定数量脉冲内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。







![[树莓派] 使用pigpio库(3) 如何发送指定数量的脉冲信号如何发送指定数量的脉冲信号](https://www.shuijiaxian.com/files_image/reation/bcimg11.png)
发表评论 取消回复