机器人
广义:AGV,无人车、服务机器人、陪护机器人、宠物机器人,各种机器人。
狭义:工业机器人。
工业机器人主要是关节型机器人,有如下几类:
- 直角型机器人
- SCARA机器人
- 串联垂直多关节机器人
- Delta机器人
控制
广义:掌握住对象不使任意活动或者超出范围或使其按控制者的医院活动。
狭义:系统状态或者输出对期望的镇定或跟踪。(镇定控制、跟踪控制、接触控制)
机器人的控制层次大致分为高层控制和关节层控制,高层控制要求更智能,关节层控制要求更准确。
机器人动力学控制强调基于模型的控制。
机器人控制的问题
- 正运动学:从关节角到末端位姿
- 逆运动学:从末端位姿到关节角
- 正动力学:系统输入决定状态变化。
- 给定机器人当前状态,再给他一个扭矩,机器人会怎样运动?
- 逆运动学:根据任务求解输入。
- 给定期望运动轨迹,如何求解关节驱动力矩?
- 速度运动学:关节速度和末端速度的关系。
- 希望机器人以指定速度沿曲面轮廓运动。
- 路径规划与轨迹生成
- 独立关节控制与多变量控制
- 反馈控制
- 前馈控制
- 计算力矩控制
- 力控制
- 阻抗控制
- 回合位置力控制方式
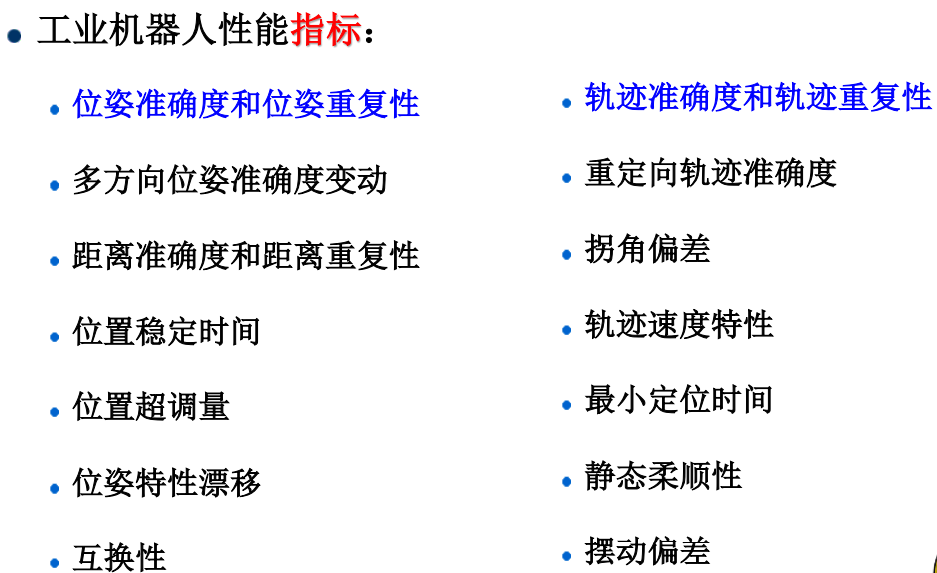
机器人控制的评价方法
最重要:绝对定位精度、重复定位精度
- 位姿准确度和位姿重复性
- 轨迹准确度和轨迹重复性
系统组成
组成为:
- 机械本体
- 控制柜
- 示教盒
核心零部件为:
- 精密减速机
- 伺服电机
- 伺服驱动器
- 控制系统(大脑,最重要的核心部件,不同品牌机器人的本质区别)
本体结构
关节型机器臂
- 串联垂直多关节6周机器人
- SCARA机器人
- 笛卡尔机器人
- Delta并联机器人
- 双平行四边形机器人(码垛机器人专用)
- 圆柱形机械臂
- 球坐标机械臂
传动方式
机械传动方式
- 齿轮传动
- 带传动
- 链传动
- 蜗轮蜗杆传动
- 轮系传动
减速机
- RV减速机
- 谐波减速机
- 行星减速机
- 摆线减速机
伺服电机
驱动装置
- 电动
- 液压驱动
- 气压驱动
电动驱动的类型
- 直流伺服电机驱动(有刷、无刷)
- 交流伺服电机驱动
- 步进电机驱动
- 舵机驱动
电动的特点
- 能源简单
- 速度变换范围大
- 效率高
- 转动惯性小
- 速度和位置精度都很高
- 但多与减速装置相连,直接驱动比较困难。
伺服
按照控制命令的要求,对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制得非常灵活方便。
伺服电机
带有位置反馈装置得直流、交流或者无刷直流电机。
伺服驱动器
伺服驱动器使用来控制伺服电机得一种控制器,一般是通过位置、速度、力矩三种方式idui伺服电机进行控制,实现高精度得传动系统定位。
最后
以上就是活力香烟最近收集整理的关于机器人控制入门知识的全部内容,更多相关机器人控制入门知识内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复