蒙特卡洛法计算机械臂工作空间matlab
- 前言
- 代码分析
- 1、 利用改进DH参数建立Franka的模型
- 2、 蒙特卡洛法求工作空间
前言
以Franka emika七轴机械臂为例,利用蒙特卡洛法在matlab中实现机器人的工作空间可视化,使之动画显示,并将得到末端位置写入excel文件
代码分析
1、 利用改进DH参数建立Franka的模型
%初始化
clear;
clc;
%% 建立机器人模型
% theta d a alpha offset
SL1=Link([0 0.333 0 0 0 ],'modified');
SL2=Link([0 0 0 -pi/2 0 ],'modified');
SL3=Link([0 0.316 0 pi/2 0 ],'modified');
SL4=Link([0 0 0.0825 pi/2 0 ],'modified');
SL5=Link([0 0.384 -0.0825 -pi/2 0 ],'modified');
SL6=Link([0 0 0 pi/2 0 ],'modified');
SL7=Link([0 0 0.088 pi/2 0 ],'modified');
SL8=Link([0 0.107 0 0 0 ],'modified');
%定义关节范围
SL1.qlim=[-2.8973,2.8973];
SL2.qlim=[-1.7628,1.7628];
SL3.qlim=[-2.8973,2.8973];
SL4.qlim=[-3.0718,-0.0698];
SL5.qlim=[-2.8973,2.8973];
SL6.qlim=[-0.0175,3.7525];
SL7.qlim=[-2.8973,2.8973];
% 连接连杆,机器人取名Franka
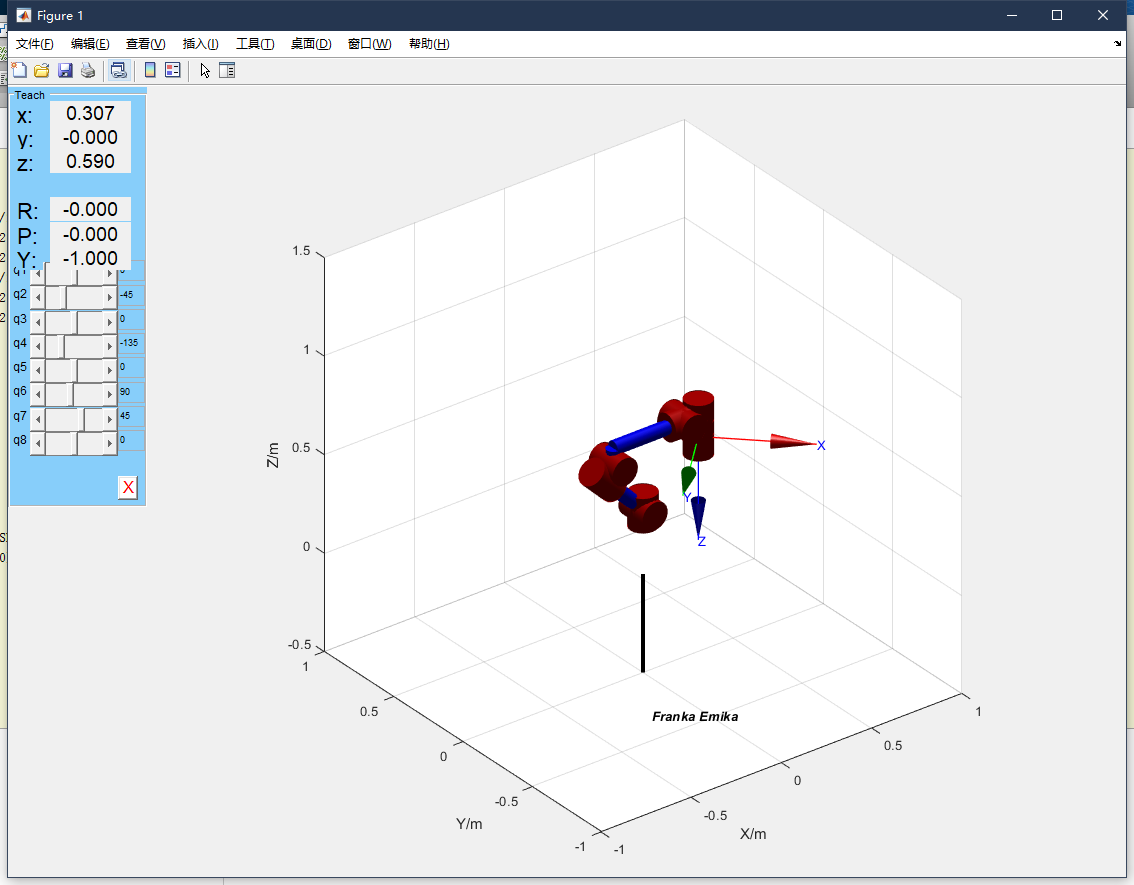
Franka=SerialLink([SL1 SL2 SL3 SL4 SL5 SL6 SL7 SL8],'name','Franka Emika');
Franka.plot([0,-pi/4,0,-3*pi/4,0,pi/2,pi/4,0]);
axis([-1 1 -1 1 -0.5 1.5]);
xlabel('X/m')
ylabel('Y/m')
zlabel('Z/m')
teach(Franka);%可以自由改变角度
hold on;
Franka.display();
效果展示
2、 蒙特卡洛法求工作空间
%% 蒙特卡洛法求工作空间
%随机点数
n=5000;
%每个关节随机生成角度
q1= -2.8973+(2.8973-(-2.8973))*rand(n,1);
q2= -1.7628+(1.7628-(-1.7628))*rand(n,1);
q3= -2.8973+(2.8973-(-2.8973))*rand(n,1);
q4= -3.0718+(-0.0698-(-3.0718))*rand(n,1);
q5= -2.8973+(2.8973-(-2.8973))*rand(n,1);
q6= -0.0175+(3.7525-(-0.0175))*rand(n,1);
q7= -2.8973+(2.8973-(-2.8973))*rand(n,1);
for i=1:1:n
%求末端位姿矩阵
mod07=Franka.fkine([q1(i),q2(i),q3(i),q4(i),q5(i),q6(i),q7(i),0]);
%动画显示
Franka.plot([q1(i),q2(i),q3(i),q4(i),q5(i),q6(i),q7(i),0]);
%绘制落点
plot3(mod07(1,4),mod07(2,4),mod07(3,4),'b.');
if mod07(1,4)>=0.2&&mod07(1,4)<=0.6&&mod07(2,4)>=-0.3&&mod07(2,4)<=0.3&&mod07(3,4)>=0.2&&mod07(3,4)<=0.8
color_Tag=0;
else
color_Tag=1;
end
point(i,:)={mod07(1,4),mod07(2,4),mod07(3,4),color_Tag}; %保存到point中
hold on;
end
xlswrite('point.xls',point,'sheet1','A1'); %写入excel
效果展示
动画效果展示
最后
以上就是光亮小丸子最近收集整理的关于蒙特卡洛法计算机械臂工作空间matlab前言代码分析的全部内容,更多相关蒙特卡洛法计算机械臂工作空间matlab前言代码分析内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复