学习优达学城的Advanced-Lane-Lines课程时,碰到了车道线的曲率半径计算。初见公式略显陌生,直到想起曲率半径的计算公式时才想明白,故记录如下。
def cal_curverature(img_shape, left_fit, right_fit):
ploty=np.linspace(0, img_shape[0]-1, num=img_shape[0])
ym_per_pix = 30/720 # meters per pixel in y dimension
xm_per_pix = 3.7/700 # meters per pixel in x dimension
# Fit new polynomials to x,y in world space
y_eval = np.max(ploty)
leftx=left_fit[0]*ploty**2+left_fit[1]*ploty+left_fit[2]
rightx=right_fit[0]*ploty**2+right_fit[1]*ploty+right_fit[2]
left_fit_cr = np.polyfit(ploty*ym_per_pix, leftx*xm_per_pix, 2)
right_fit_cr = np.polyfit(ploty*ym_per_pix, rightx*xm_per_pix, 2)
# Calculate the new radii of curvature
left_curverad = ((1 + (2*left_fit_cr[0]*y_eval*ym_per_pix + left_fit_cr[1])**2)**1.5) / np.absolute(2*left_fit_cr[0])
right_curverad = ((1 + (2*right_fit_cr[0]*y_eval*ym_per_pix + right_fit_cr[1])**2)**1.5) / np.absolute(2*right_fit_cr[0])
xoffset=(left_fit_cr[2]+right_fit_cr[2])/2-img.shape[1]*xm_per_pix/2
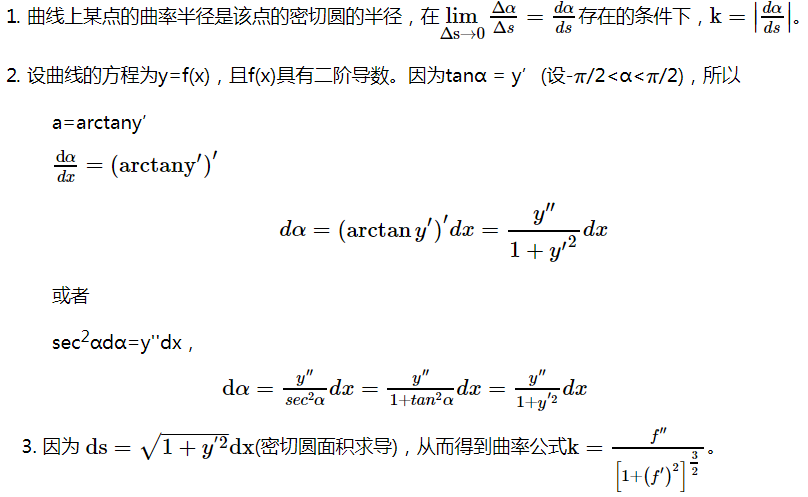
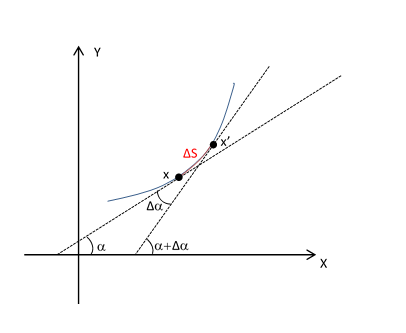
return left_curverad, right_curverad, xoffset一、曲率半径公式及推导
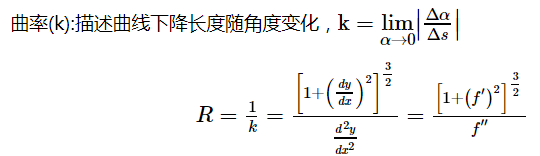
详细推导过程如下:
二、利用公式计算拟合车道线的曲率半径
假设车道线方程为二次拟合曲线:
x = a*y*y + b*y +c
则在y米远处,曲率半径为:
![]()
最后
以上就是潇洒鼠标最近收集整理的关于【Python】车道线拟合曲线的曲率半径计算公式及代码的全部内容,更多相关【Python】车道线拟合曲线内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复