目录
PanoSim是新一代智能汽车仿真软件,具有完整的驾驶员模型、高精度车辆模型、传感器模型、天气模型,可方便地进行场景构建和算法MDL搭建,可用于智能驾驶算法的快速开发和验证。
1 研发背景
随着汽车工业的高速发展,汽车的电子化与智能化进程显著加快,智能辅助驾驶、主动安全与自动驾驶等已经成为了汽车技术发展的前沿趋势。然而不同于传统汽车技术的研究,在汽车智能化研发与测试领域将要面临行驶环境不可预测、难以复制、安全无法保障、试验周期和成本控制压力骤增等诸多困难与挑战,基于模拟仿真技术的数字化与虚拟化研发手段已经通过近年来计算机数值模拟方法和数学建模理论的不断发展逐渐成为当今世界汽车智能化技术研发的主流方向。
2 介绍
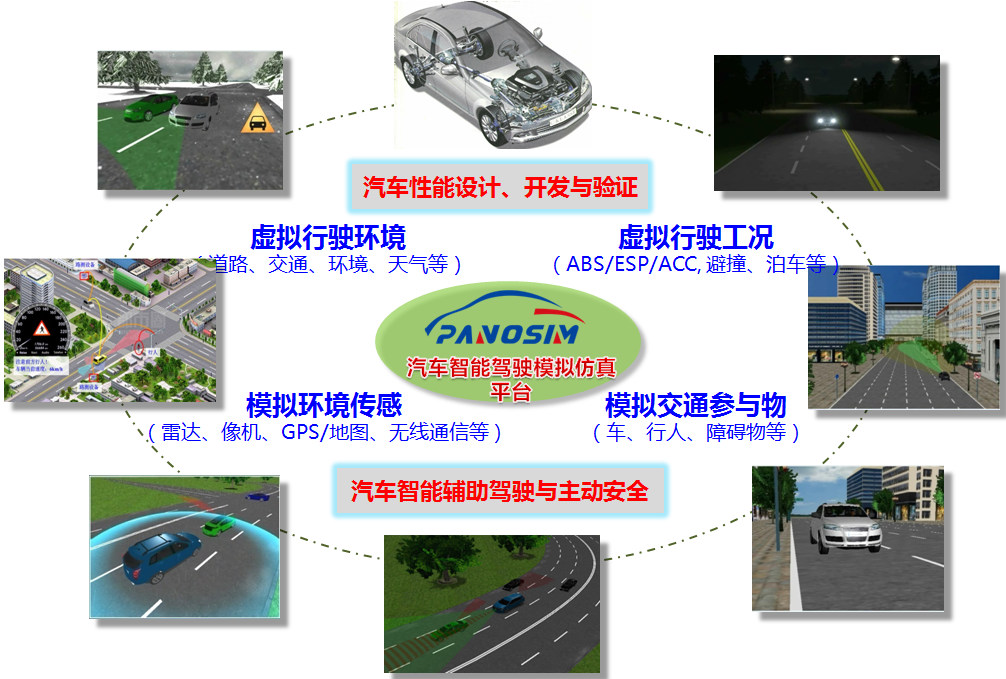
PanoSim—新一代汽车智能驾驶模拟仿真软件正是基于解决当前和未来汽车技术研发领域所面临的各项突出瓶颈问题、且专注于通过模拟仿真技术实现汽车虚拟研发的一体化化工具与平台,提供包括离线仿真(Offline Simulation)、实时-软硬件在环仿真(RT-SIL/HIL Simulation)和驾驶员在环仿真(RT-DIL Simulation)等在内的多平台、全流程和一揽子解决方案,支持覆盖的应用范围既包含传统汽车性能设计、开发和验证(例如汽车底盘和整车性能开发、汽车动力性能开发、汽车电控系统设计与开发等),又包含新兴汽车智能辅助驾驶与主动安全技术与产品研发(例如环境传感与感知、数据融合、ADAS研发测试与验证、V2X与车联网、无人驾驶等),对于汽车技术研发从概念设计、原型样机和系统验证的不同阶段和不同环节均能够通过高效、安全的数字化和虚拟化研发手段显著降低成本、缩短周期、提高质量,特别是保障安全,是现代汽车先进技术和产品开发所必备工具。

3 软件功能和优势
PanoSim集车辆动力学模型、汽车三维行驶环境模型、汽车行驶交通模型、车载环境传感模型、Matlab/Simulink仿真模型自动生成、图形与动画后处理工具等于一体,基于精确与高效兼顾的物理建模和数值仿真原则,利用先进的虚拟现实技术逼真地模拟汽车驾驶的各种环境和工况,并基于几何模型与物理建模相结合的建模理念建立了高精度的环境感知模型,其涉及到的关键技术主要包括以下几个方面:
- 高精度和高效车辆动力学建模技术:汽车和车辆动力学精确建模是汽车模拟仿真的重要基础和关键技术。核心研发团队基于长期基础研究过程中建立的对汽车和车辆动力学的深刻理解,形成了汽车高精度建模和高效数值仿真等关键技术,包括高精度底盘(制动、转向和悬架)和动力总成(发动机和动力传动系统等)建模技术,高精度轮胎建模技术与驾驶员建模技术等,高精度转向力感模拟技术和高精度模拟器动感模拟技术等,以支持对汽车行驶动力性、舒适性和操控稳定性模拟仿真,包括大非线性和极限工况下汽车性能的模拟与仿真。车辆动力学及其相关模型的仿真精度达到或超过了当今国际主流汽车动力学模型。
- 复杂汽车行驶环境及环境传感建模技术:汽车行驶环境十分复杂,涉及包括道路、交通和交通参与物、天气等许多影响因素,它们不仅影响汽车的行驶安全和性能,也是影响车载环境传感器对环境检测和感知的关键因素。准确地模拟汽车行驶环境、模拟汽车行驶环境对车载环境传感和感知的复杂影响机理是研究和开发汽车智能辅助驾驶等系统的关键技术。核心研发团队基于多年对汽车行驶环境的物理建模和对汽车行驶环境车载传感器的模拟理论和方法的研究(研究成果先后多次发表在国际一流专业期刊),形成了对汽车复杂行驶环境和环境传感模拟的关键技术,包括基于模型和图像混合建模的方法,以支持对车载像机、视觉成像和图像处理等的模拟和仿真;包括复杂天气对雷达电磁波传播和图像成像的影响(风、雨、雪、雾、冰雹等),包括对车载雷达及其检测的模拟技术,对雷达电磁波发射、传播、反射和接受机理的模拟,以及对雷达散射面积RCS的估算模型等。此外PanoSim产品的关键技术还包括对汽车行驶道路和道路网络拓扑结构、数字地图、GPS导航、交通标记和信号、汽车行驶场景等的模拟;支持车车通信的车载无线通信信道建模和支持车联网的无线路由及无线通信网络建模等关键技术。
- 完整性和一体化的模拟仿真技术:汽车技术和产品,特别是现代主动安全和智能行驶技术及其相关产品的研发涉及从概念设计和定义、系统设计与分解、软硬件设计与开发、系统集成、测试与验证等诸多技术环节,而不同研发阶段又有着不同的技术需求。传统的模拟仿真工具往往建立在不同的软件平台,仿真不同步、数据不兼容、用户界面不统一、数据处理不一致、以及仿真与测试和验证脱节等问题,不仅严重影响开发效率,而且使得软件维护困难复杂。PanoSim产品的关键技术在于建立一个高效、完整和一体化的模拟仿真平台,打造从离线仿真、实物/硬件在环和驾驶员在环等实时仿真到实车测试的无缝工具链和数据链,形成基于该平台下汽车新产品、新技术开发在不同阶段、不同环节和不同需求下的分析、设计、测试和验证等一体化研发流程,并形成一个支持先进技术和产品开发的高效、完整和一体化的技术产品开发体系。

使用PanoSim工具进行各种汽车模拟仿真实验的流程简洁而清晰,结合如图3所示的系统功能架构现将各主要模块的风格特点说明如下:
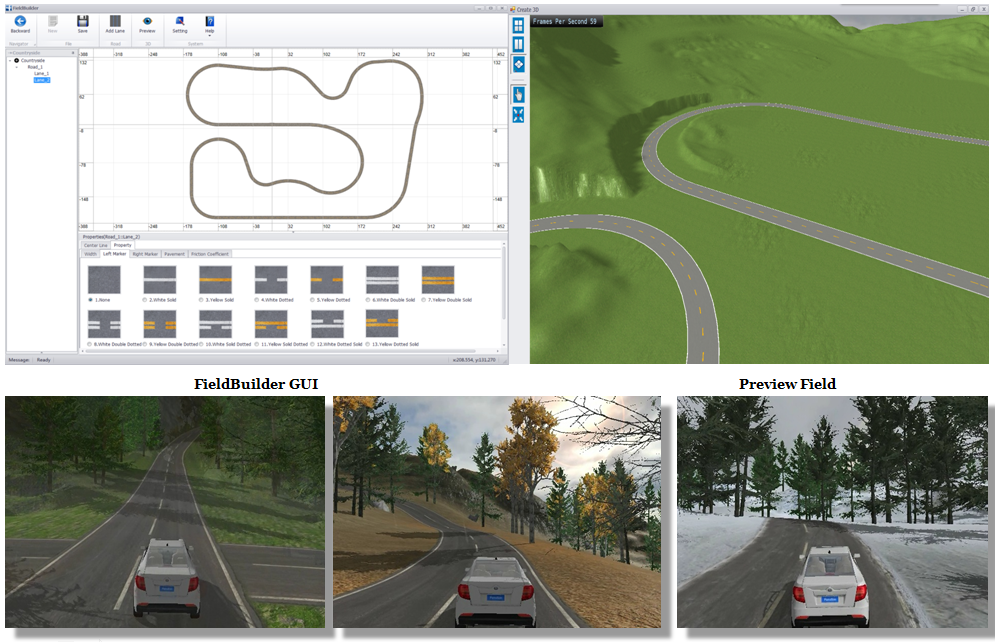
- 场景编辑器(FieldBuilder):主要用于创建或编辑仿真实验所需三维虚拟场景和环境(包括道路和道路网络结构、道路路面和车道信息、地形、周边建筑和交通设施等),其功能特色包括:
- 通过在二维平面任意且友好地绘制道路线或道路网络线,或通过导入道路线或地图数据,系统自动生成包含道路、车道线、地形和周边环境的三维实验场景。
- 支持对车道线、道路路面纹理、附着属性、周边环境、地形高度等信息的灵活定制和同步预览,兼容多种格式复杂的路面特征信息,自动生成所见即所得的逼真三维虚拟实验场景。
- 支持用户分组自定义丰富的场景数据库,最大程度利用已有基础场景元素进行复制组装并快速生成同类新场景,能够为数字化虚拟试验场的构建提供完整的解决方案。
- 车辆编辑器(VehicleBuilder):主要用于创建或编辑仿真实验所用车辆三维外形、车辆动力学和汽车结构参数,其功能特色包括:
- 支持根据不同的实验需要设置多种车辆模型(包括高精度、三维非线性复杂车辆动力学模型、高效交通车模型等,以及兼容包括CarSim等在内的其它商业模型)。
- 支持对用户自行设计的三维车辆外形文件(STP格式)进行转化导入,同时系统提供多种缺省的车辆外形(例如轿车、皮卡等)库文件供用户灵活选用。
- 车辆动力学模型基于参数化的多刚体动力学建模方法,按车体、悬架、转向、发动机、动力传动、制动、车轮和轮胎等进行模块化拆分组装,精度高、实时性好并且配置灵活。
- 实验设置运行(PanoSim MainGUI/Sensor Setup/Field Setup/SensorBuilder)
承担PanoSim核心操作枢纽角色,涵盖实验分组管理、选择实验场景、设置环境条件(例如天气等)、摆放实验车辆、安装车载传感(例如像机、雷达等)、部署交通元素(例如路障、交通标志等)、设置交通模型(例如干扰交通、随机交通等)、设置实验参数、设置驾驶参数、实验运行跟踪(与Matlab/Simulink无缝集成)等多项子模块,其功能特色包括:
- 将实验、场景、车辆、传感、环境、交通和驾驶要素进行高度数据抽象和面向接口的组件化定义,能够灵活、快速的组装出各种复杂的实验工况,具备良好的易用性、开放性和兼容性。
- 提出面向汽车智能化的交通建模方法,为车载环境传感感知、规划与决策、智能驾驶等提供具有较高置信度的、且能与智能汽车形成相互交互的实时交通车辆行驶环境。
- 支持小孔和鱼眼像机建模,并根据像机安装位置、姿态,以及像机本身物理参数(如焦距、视场角、横纵像素数等)模拟像机拍摄和图像质量退化等功能。
- 提出基于几何建模与物理建模相结合的雷达混合建模方法,较为逼真地模拟了雷达及其探测机理,并能反映环境对雷达探测信号传播的影响(噪声、杂波等干扰和衰减)。
- 基于网络层-MAC层-物理层抽象建模机理支持对V2X通信功能的模拟,信道模型考虑不同交通环境对无线信号传输的影响(如交通密度、建筑物、障碍物遮挡等),实现综合仿真效率和效果最优。
- 实验运行过程无缝集成Matlab/Simulink工具并自动生成MDL模型,支持对用户自定义控制算法的联合仿真,能够实现跨平台、并行同步并且高效的实时数值计算。
- 实验数据分析(PanoPlot/PanoAnim/DataManager):主要用于对实验过程数据进行后处理和分析报告(例如多维度图表数据分析、实验动画的回放等)。
其功能特色包括:
- 支持所有实验过程参数运行数据的自定义组合分析(例如车速、油门开度、轮胎力等),自动生成数据图表和分析报告。
- 支持对实验过程3D动画的重复回放和抓图录像,能够模拟输出环境传感装置采集到的原始数据并通过标准通信协议传输给指定的控制器数据接口。
- 能够对用户自定义的实验数据、场景数据和车辆数据进行批量打包备份和导入导出,方便不同设备间的数据迁移以及典型实验记录的标准化归档管理。
最后
以上就是无聊外套最近收集整理的关于无人驾驶仿真软件PanoSim:(1)介绍1 研发背景2 介绍3 软件功能和优势的全部内容,更多相关无人驾驶仿真软件PanoSim:(1)介绍1内容请搜索靠谱客的其他文章。








发表评论 取消回复