随着自动驾驶技术发展,自动驾驶仿真测试逐渐成为重要的环节,目前大家熟知的仿真软件有VTD、carla、carsim等等,其中各个软件有各自的应用特点。如:VTD特点为具有高保真度的环境模型,用户可以自定义传感器插件和车辆动力学插件,但其价格昂贵;carla为开源模拟器,支持脚本开发,但其占用硬盘空间较大,影响其广泛使用;carsim可以对车辆动力学参数进行修改,定制不同的动力学模型,但其应用范围较小。
今天拿到了panosim软件的试用权,使用体验很好,分享一下使用过程。
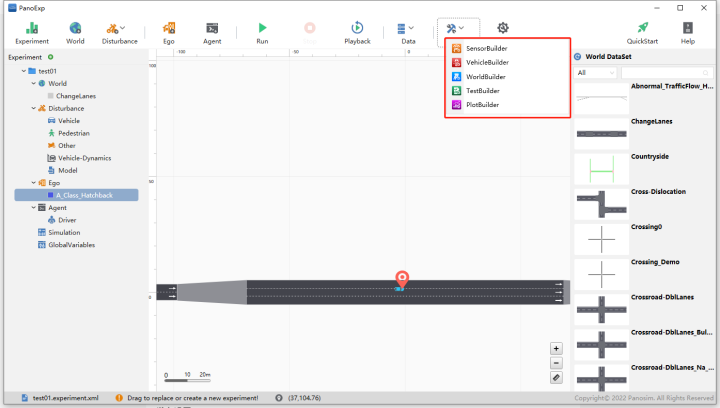
图1为panosim主页面,红框内为自带的tools,可以对路网和车辆属性进行编辑。panosim自带多种路网,包括十字路口、高速公路、匝道、T型路口等,可基本满足测试需求,也可以自己create或import路网,导入支持.osm/.xodr/net.xml格式,兼容性很强。
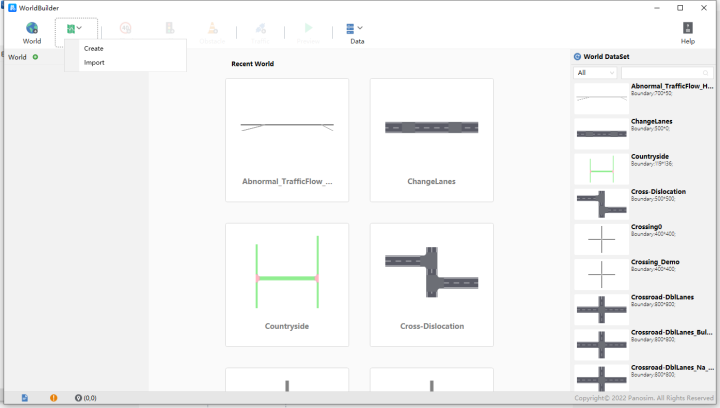
图2 worldbuilder界面
除此之外,可以对被测主车的sensor和dynamics进行自定义,也可以添加行人和非机动车模型,直接拖入即可,非常方便。如果有高级测试需求,可以通过disturbance接口自定义测试环境,导入多种类型的disturbance。
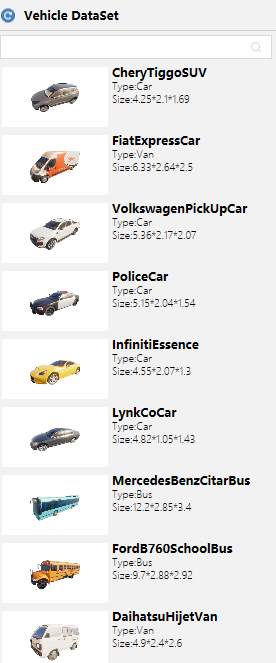
图3 不同类型交通车
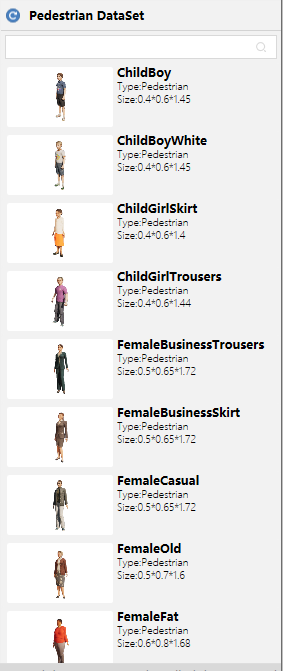
图5 不同类型行人模型
panosim自带多种类型车辆动力学模型,包括car、bus等等。
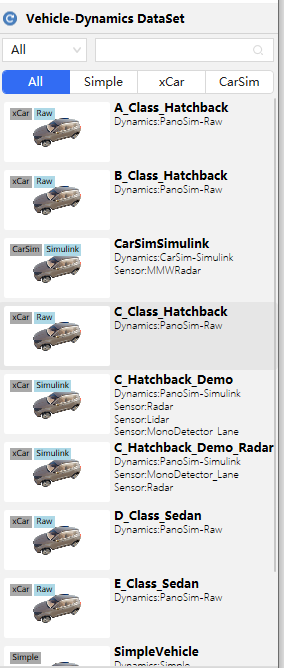
图6 不同类型的车辆动力学模型
以一个简单小demo进行分析,仿真环境设置如图7中所示。

图7 仿真实验设置
左侧任务栏为仿真实验的各项设置,包括路网使用为“highway”,主车采用自带的D_class动力学模型,控制模型采用系统自带的agent模型,这里可以替换为自定义的待检测控制算法;环境交通模型主要加入一些车辆和自行车模型,点击run就可以开始实验。
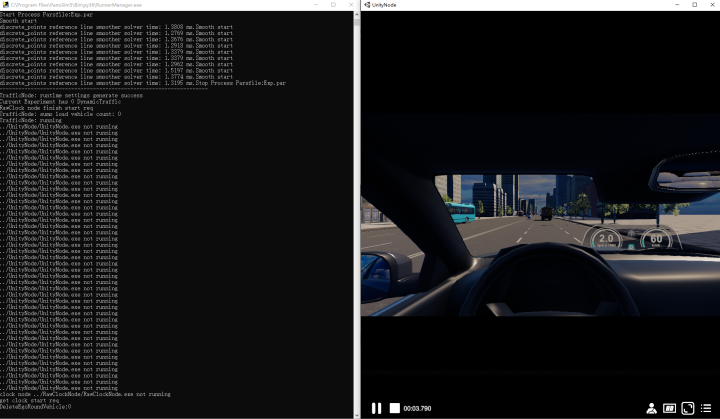
图8 仿真窗口
实验运行之后,启动两个窗口,一个为verbose窗口(可在设置中开启),另一个为仿真场景窗口,实时查看仿真情况,在场景窗口中可以自定义查看视角,图8为驾驶员视角。

图9 场景窗口的tracking视角

图10 场景窗口的bird view视角
不同的仿真视角支持不同情况下的需求,非常实用而方便。panosim还支持V2X的模拟仿真等其它更加丰富的功能,有待后续研究。
未完待续。
最后
以上就是完美哈密瓜最近收集整理的关于汽车自动驾驶技术与产品研发仿真测试软件—panosim(一)的全部内容,更多相关汽车自动驾驶技术与产品研发仿真测试软件—panosim(一)内容请搜索靠谱客的其他文章。








发表评论 取消回复