PanoSim可以支持停车场搭建,支持平行、垂向、斜向停车位的构建,为AP/AVP仿真测试提供基础。这里以AP为例,选择法规ISO16787-2017中双边界车辆垂直车位泊车场景。
1. 场景描述
⚫ 垂直车位
⚫ 边界车辆横向对齐且相互平行
⚫ 天气:晴天
⚫ 光照:白天
2. 场地构建
同6.1,在WorldBuilder里导入停车场路网文件,在“Scenario Type”选中“Parking”,生成 停车场景,如图6.24。
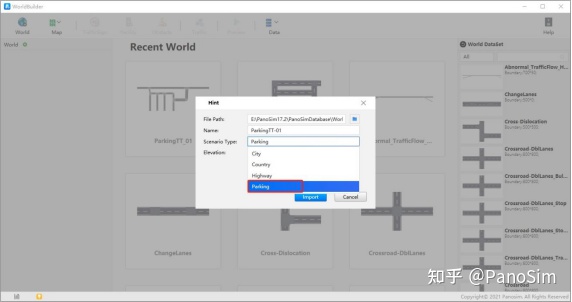
图6.24 停车场路网导入界面
在WorldBuilder中,点击上方工具栏“Facility”,选中右侧栏“RectangleParking”,拖入主 界面,如图6.25。点击左侧树状栏可以设置车位的位置及朝向角,如图6.26。PanoSim支持 一键复制功能(如图6.27),可高效快速构建停车场场景。搭建好的停车场场景如图6.28。 可以在停车场中加入随即交通流,同时可以对天气环境关照进行设置。
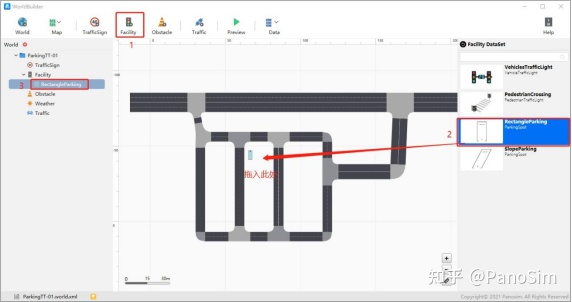
图6.25 停车场路网导入界面
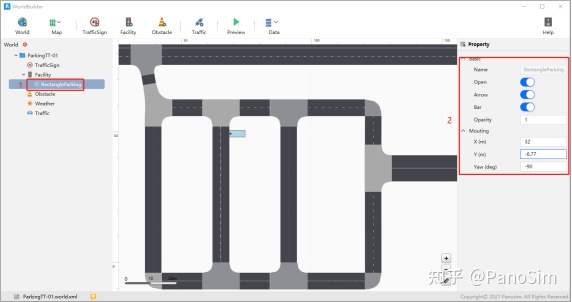
图6.26 停车位参数配置界面
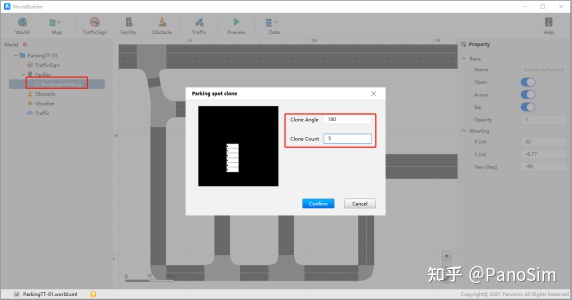
图6.27 停车位复制功能
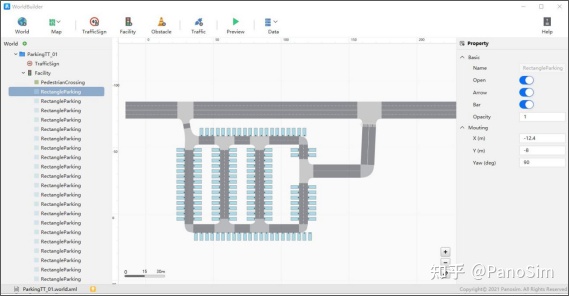
图6.28 停车场构建
3. 车辆构建
测试前需要对测试车辆进行部分数据标定,或者针对测试车辆重新构建车辆模型, VehicleBuilder 模块支持客户车辆导入,支持对导入车辆以及 PanoSim 自带车辆模型进行参 数修改。这里选用 PanoSim 自带车辆模型 C_Class_Hatchback。
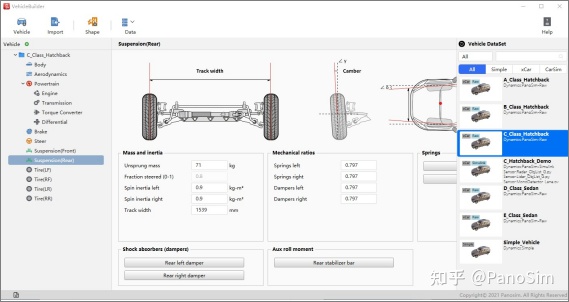
图6.29 VehicleBuilder参数修改界面
4. 传感器构建
实验搭载12个超声波雷达,采用前中后4、4、4的布局方式,有效探测主车周边目标物 位置信息。搭载4个鱼眼摄像头,分别处于车前后保险杠以及左右后视镜的位置,精确识别车位线。分别对传感器安装位置参数X/Y/Z/Yaw/Pitch/Roll,传感器内参Range/Horizontal FoV/Vertical FoV进行设置,形成以下布局,如图6.30。
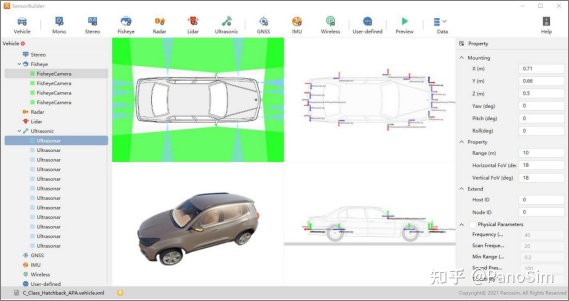
图6.30 传感器加载界面
5. 场景构建
这里对于停车场景的构建,需要链接资源包,用来填充停车场空余车位,留下一个空 车位,目标车位如图6.31。用来根据ISO-16787-2017,主车纵向与目标车位的邻车位相隔 30m,侧向距离1.0±0.3m,由此确定主车位置,速度为15km/h,如图6.32。场景设置完成 后,即可添加自行开发的泊车算法开展泊车实验。
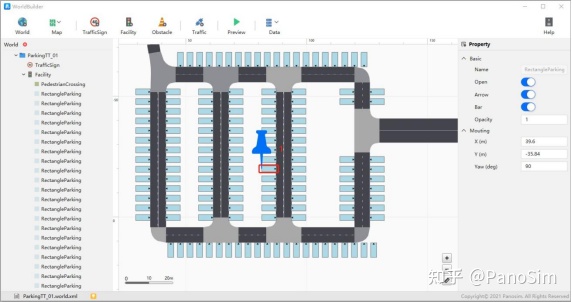
图6.31 目标车位选择
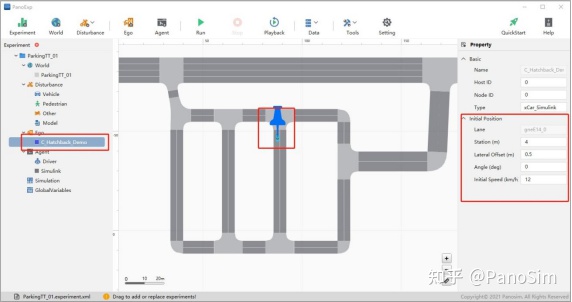
图 6.32 场景构建界面

图 6.33 垂直泊车
6. 数据后分析
PanoSim拥有PlotBuilder模块用于对数据的存储与分析,存储信息包括三大类:主车姿 态信息、主车动力学信息以及全局变量,下面是主车泊车过程中的X/Y曲线图,如图6.34。
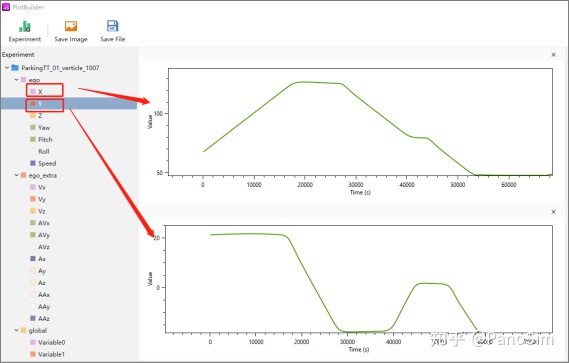
图6.34 PlotBuilder界面
7. 自动化测试评价
根据团标《部分自动泊车系统性能要求与测试规程》、《自主代客泊车系统总体技术要求》,提取泊车时长、停车姿态、泊位间距、揉库次数作为参考数据,建立评价模型, 客户可对每个参数设置不同权重,通过TestBuilder加载评价模型,输出最后得分。
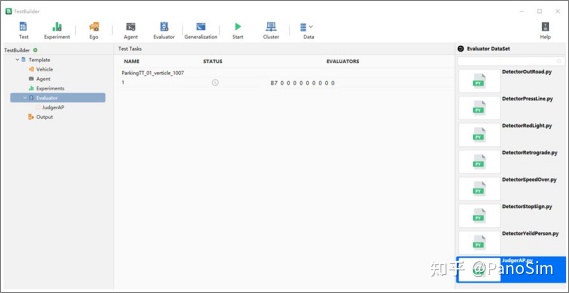
图6.35 评估器加载界面
最后
以上就是靓丽朋友最近收集整理的关于PanoSim--AP 测试解决方案的全部内容,更多相关PanoSim--AP内容请搜索靠谱客的其他文章。








发表评论 取消回复