先注明所需要的文件与视频链接:
EXUAV教程和工具
http://pan.baidu.com/s/1boUCRjp
PIXHAWK飞控教程
http://download.csdn.net/download/jackey_onlyforyou/9704268
PIXHAWK飞控的介绍
http://download.csdn.net/download/jackey_onlyforyou/9704244
(如果是购买的全套的EXUAV的器件,完全可以按照exuav品牌提供的视频教程,是非常容易入门的。
如果不购买的不是他们提供的全套配件,也没关系,也能按照下面的教程进行入门)
EXUAV航模官网(现在叫黑蚁穿越无人机):http://www.exuav.com/forum.php
注册账号之后在:百科教程-APM/PIXHAWK 分区里面看最基本的教程,这里面有新手从器件的认识,原理的介绍,接线,地面站安装,固件的烧写,校准,然后就是解锁试飞,最后是调整PID参数,就可以稳定的飞行了。
从仅仅实现遥控飞行的角度讲,这样已经算是成功了,至于后面的就是成为一名合格的飞手了,后面我会尝试着去实现在PIXHAWK上的二次开发。
虽然在EXUAV的论坛里面的基础教程对PIX及其配件已经讲的很清楚了,我这里也稍微啰嗦一下,说一下我在学习和装配过程中对于PIX及其配件的了解:
PIXHAWK主控为STM32F427,失效保护控制器为STM32F103,所以如果有STM32基础的话会对在PIX上进行二次开发有较大好处。
PIXHAWK上有箭头→的一方朝前,与GPS安装方向一致。
螺旋桨分正桨和反桨,四旋翼电机分1,2,3,4号
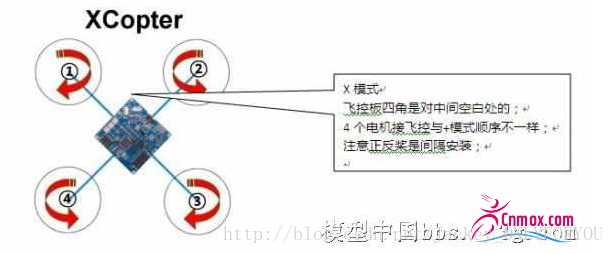
最后只需要满足装上螺旋桨之后全部向下吹风即可。在进行校准调参之前我建议先尝试着装机一下,参考着文档和各类四旋翼的安装视频,熟悉整个安装流程。(因为在烧写固件的时候还需要再把PIX卸下来+_+,装完之后应该会很有成就感吧。)
这是装配完成后的整机。

特别注意线序,因为线序反了之后将会直接导致烧坏各个器件比如接收机。线序的说明在PIXHAWK的教程里有详细说明。
后面会再讲解配置和调参以及试飞的整个过程
——JackeyLiu HUST 2016/12/7
最后
以上就是迷你小熊猫最近收集整理的关于PIX学习路径-2-PIXHAWK及其各配件的认识与装配注意的全部内容,更多相关PIX学习路径-2-PIXHAWK及其各配件内容请搜索靠谱客的其他文章。








发表评论 取消回复