ROS_PCL学习(2)
文章目录
- ROS_PCL学习(2)
- 前言
- 一、创建新的工程
- 二、程序运行
- 1.启动ros
- 2.读入数据
- 3.启动rviz
- 总结
前言
本文主要关于读取点云数据文件。
一、创建新的工程
在上一节的/chapter10_tutorials/src下继续创建新的cpp文件,
pcl_read.cpp文件内容如下:
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include<pcl/io/pcd_io.h>
int main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_read");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("pcl_output", 1);
pcl::PointCloud<pcl::PointXYZ> cloud;
sensor_msgs::PointCloud2 output;
pcl::io::loadPCDFile ("1.pcd",cloud);//改成自己的pcd文件名
pcl::toROSMsg(cloud,output);
output.header.frame_id = "odom";
//Convert the cloud to ROS message
pcl::toROSMsg(cloud, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok())
{
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
二、程序运行
1.启动ros
roscore
2.读入数据
此步要在pcd的文件目录下完成
rosrun chapter10_tutorials pcl_read
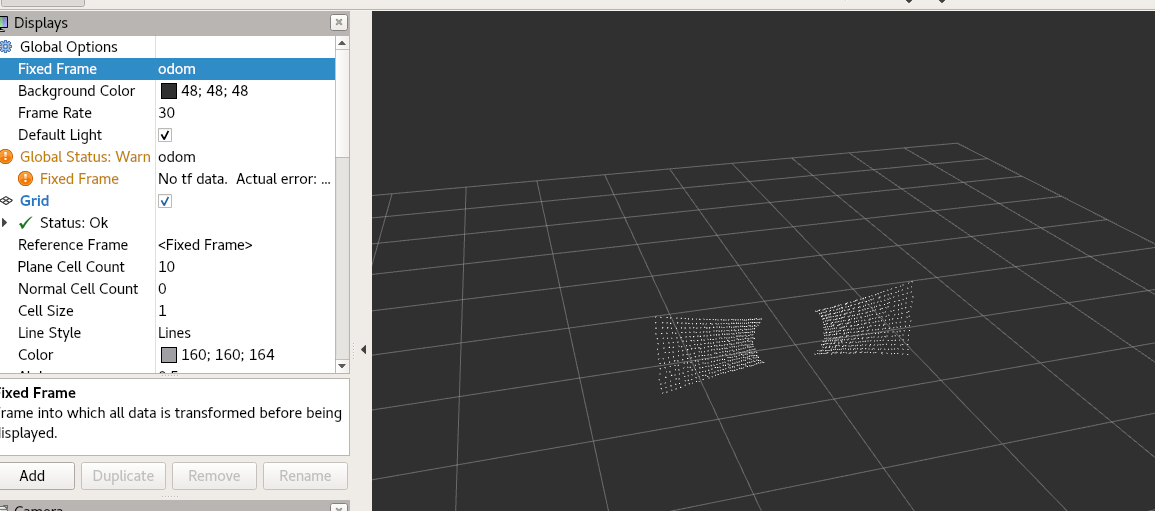
3.启动rviz
配置和上一节基本差不多,调好后就能看到效果了。
总结
下一节尝试创建一个PCD文件。
最后
以上就是清脆皮皮虾最近收集整理的关于机器人开发笔记之ros-pcl学习(2)ROS_PCL学习(2)前言一、创建新的工程二、程序运行总结的全部内容,更多相关机器人开发笔记之ros-pcl学习(2)ROS_PCL学习(2)前言一、创建新内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复