参考:http://wiki.ros.org/rviz/Troubleshooting
1、运行rviz前,关闭硬件加速(实际上并没有遇到此问题)
export LIBGL_ALWAYS_SOFTWARE=1
rosrun rviz rviz2、信息不显示(Help! My data is not showing up!)
ROS依赖tf数据类型中的 frame_id和 stamp来转换数据,tf数据类型举例如下:
transforms:
-
header:
seq: 0
stamp:
secs: 1516004833
nsecs: 772330552
frame_id: odom
child_frame_id: base_link
transform:
translation:
x: 0.0
y: 0.0
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0rostopic echo /tf
rostopic info /tf
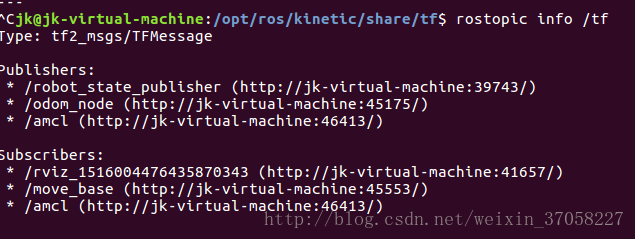
查看发布信息的活动节点信息:
rosnode info robot_state_publisher根据返回信息,打印指定节点信息(例如):
rostopic echo /joint_states
rostopic info joint_states最后
以上就是活力月饼最近收集整理的关于ros—rviz故障排除的全部内容,更多相关ros—rviz故障排除内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复