相机投影矩阵为P,是MTMC任务中每个标定好的摄像机所配备的参数。总是忘记关于它的基本性质,现在写在这里
1. P矩阵的维度是3*4。
2. 相机成像过程可以描述为x=PX,其中X是一个4*1的向量:(X,Y,Z,1)T。
3. 左侧的x是成像后的像素点坐标(x,y,1)。
4. 成像过程:3*1 = 3*4 * 4*1。
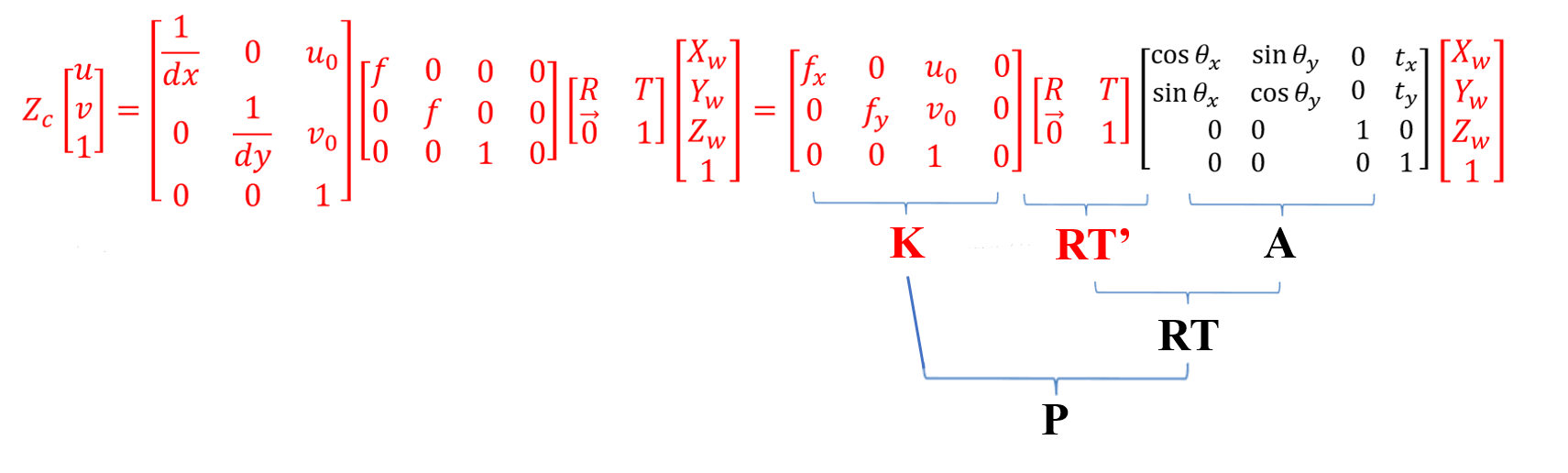
P矩阵的内部目前还没有探究,但是已经了解到P的构成,P中包含旋转、平移矩阵,包含与世界坐标系的关系。(盗的柳桢的图hhh)
最近需要对EPFL的WildTrack数据集进行探究,第一步就是要明确相机标定的参数含义,将其使用起来。此数据集给定了K矩阵(3x3)、R参数(1x3)、T参数(1x3)。明确了这些参数后就可以通过
公式计算投影矩阵。
要注意此处的R是rx、ry、rz(三个弧度值)通过三角函数运算来得到的,这三个弧度值不能直接用。在计算R的过程中有很多的版本,最后试来试去都不行,最后还是通过OpenCV自带的Rodrigus函数来将rx、ry、rz映射为R。
还有一点需要明确:下图公式中,K是3x4,RT是4x4,乘到一起是P(3x4)。实际也可以去掉底部的增广行,K是3x3,RT是3x4,乘到一起依然是P(3x4)。
注意:
当使用x=P*X进行投影时,得到的x是3*1维,此时最后一位不一定是1,一定要进行归一化,即x中的值全部除以最后一位。此时的x和y才能做为图像上的点。
points_8 = Get_3D_rect(x, y, rect) # points_8含有8个3D点,维度是4*8的array
img_points_8 = np.matmul(Ps[cam], points_8) # 3*4的P矩阵和点进行相乘
img_points_8 = img_points_8/img_points_8[2,:] # homogeneous进行归一化,之后可以在image上绘制
最后
以上就是含蓄火龙果最近收集整理的关于相机几何学——相机投影矩阵( Camera Projection Matrix)的全部内容,更多相关相机几何学——相机投影矩阵(内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。







![CVBS-复合视频广播信号[转]](https://www.shuijiaxian.com/files_image/reation/bcimg7.png)
发表评论 取消回复