相机标定(8.15)
原文链接:https://blog.csdn.net/lixianjun913/article/details/10012885
1:相机标定含义
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。
2:相机标定意义(解决为什么要进行相机标定)
计算机视觉的基本任务之一是从摄像机获取的图像信息出发计算三维空间中物体的几何信息,并由此重建和识别物体,而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。
3:相机标定的方法(解决如何进行相机标定)
相机标定方法有:传统相机标定法、主动视觉相机标定方法、相机自标定法。
摄像机相对于世界坐标系的方位。标定精度的大小,直接影响着计算机视觉(机器视觉)的精度。迄今为止,对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决,对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的标定方法。
4.相机标定后可以得到什么?
相机的内参矩阵A(dx,dy,r,u,v,f),外参矩阵[R|T]、畸变系数[k1,k2,k3,,p1,p2,]。
•内参矩阵各元素意义:一个像素的物理尺寸dx和dy,焦距f,图像物理坐标的扭曲因子r,图像原点相对于光心成像点的的纵横偏移量u和v(像素为单位)。
•外参矩阵:世界坐标系转换到相机坐标系的旋转R和平移T矩阵。
•畸变系数:包括相机的径向畸变系数k1,k2,k3,和相机的切向畸变系数p1,p2,。
5.标定方法
如果没有包的话,可以用
sudo apt install ros-kinetic-usb-cam
1.利用棋盘格进行标定。如下图
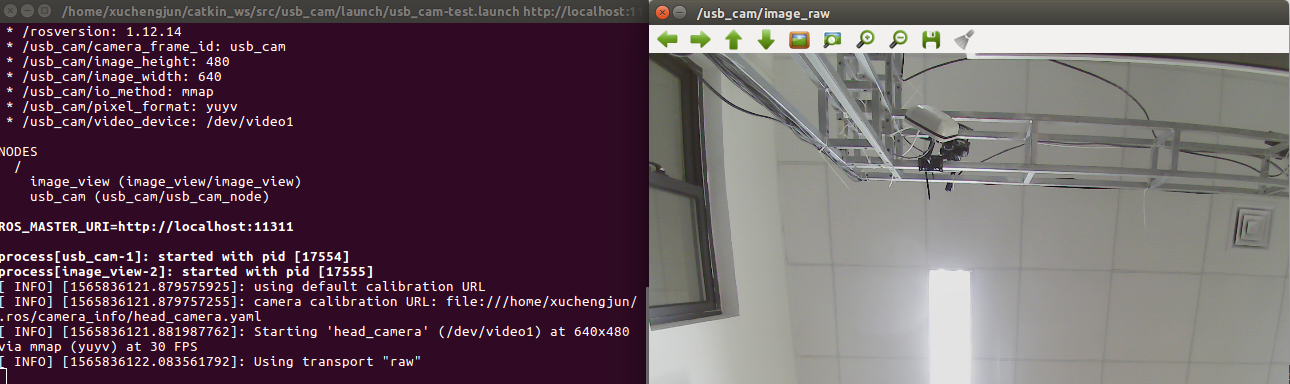
2.启动ROS(在终端输入roscore)
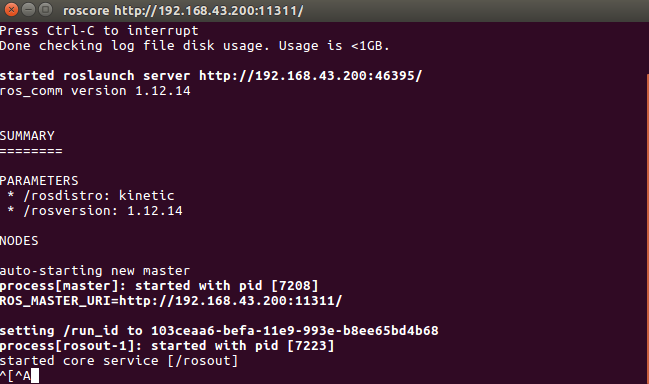 3.启动摄像头
3.启动摄像头
roslaunch usb_cam usb_cam-test.launch
 4.启动display进行标定
4.启动display进行标定
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.0245 image:=/usb_cam/image_raw camera:=/usb_cam
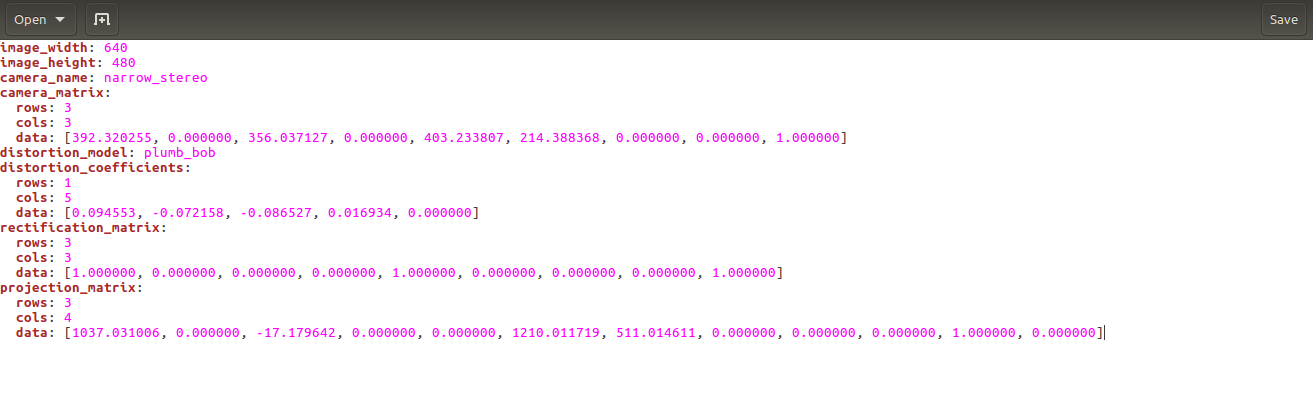
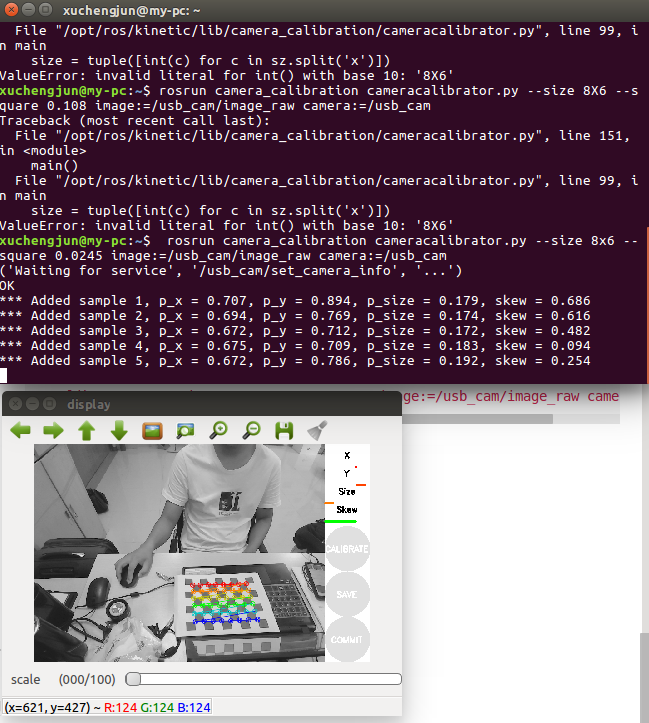 上面是得到的数据,一般40组数据就够了CALIBRATE按钮就会亮起。然后SAVE,就会得到相机的参数。
上面是得到的数据,一般40组数据就够了CALIBRATE按钮就会亮起。然后SAVE,就会得到相机的参数。
camera_matrix即为相机的内参,四个数字分别为fx,cx,fy,cy。
查询设备:
$ls /dev/video*
最后
以上就是任性银耳汤最近收集整理的关于相机内参标定相机标定(8.15)的全部内容,更多相关相机内参标定相机标定(8内容请搜索靠谱客的其他文章。








发表评论 取消回复