文章目录
- 一、坐标关系
- 二、坐标变换
-
- 2.1 变换流程
- 2.2 参数计算
- 2.3 外参计算
- 2.4 深度计算
- 三、程序实现
一、坐标关系
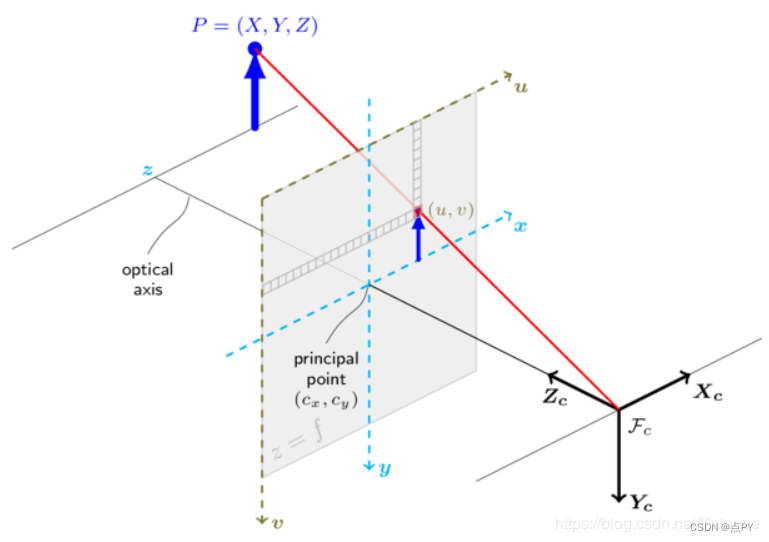
相机中有四个坐标系,分别为world,camera,image,pixel
- world为世界坐标系,可以任意指定xw轴和yw轴,为上图P点所在坐标系。
- camera为相机坐标系,原点位于小孔,z轴与光轴重合,xw轴和yw轴平行投影面,为上图坐标系XcYcZc。
- image为图像坐标系,原点位于光轴和投影面的交点,xw轴和yw轴平行投影面,为上图坐标系XYZ。
- pixel为像素坐标系,从小孔向投影面方向看,投影面的左上角为原点,uv轴和投影面两边重合,该坐标系与图像坐标系处在同一平面,但原点不同。
二、坐标变换
下式为像素坐标pixel与世界坐标world的变换公式,右侧第一个矩阵为相机内参
最后
以上就是任性草丛最近收集整理的关于像素坐标到世界坐标的转换一、坐标关系二、坐标变换的全部内容,更多相关像素坐标到世界坐标内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复