IMU模型和运动积分
$R_{tiny{WB}} left( t +Delta{t} right) = R_{tiny{WB}} left( t right) Expleft( int_{t} ^{t+Delta{t}} {}_{tiny{B}} omega_{tiny{WB}} left( tau right) dtau right)$
${}_{tiny{W}}V left(t+Delta{t} right) = {}_{tiny{W}}Vleft( t right) + int _{t} ^{t+Delta{t}} {}_{tiny{W}}a left( tau right)dtau $
${}_{tiny{W}}P left(t+Delta{t} right) = {}_{tiny{W}}Pleft( t right) + int _{t} ^{t+Delta{t}} {}_{tiny{W}}V left( tau right)dtau ,+int int _{t} ^{t+Delta{t}}{}_{tiny{W}}a left( tau right)dtau^2$
其中IMU读数,即测量值(理论值在偏置和噪声的影响下得到的读数)为
${}_{tiny{B}} tilde{ omega }_{tiny{WB}} left( t right) = {}_{tiny{B}} omega_{tiny{WB}} left( t right) + b^{g} left( t right) +eta^{g}left( t right) $
${}_{tiny{B}} tilde{ a } left( t right) = R_{tiny{WB}}^{T} left( t right) left( {}_{tiny{W}}aleft( t right) - {}_{tiny{W}}gright) + b^aleft( t right) + eta^a left( t right) $
假设在时间间隔$left[ t,t+Delta{t} right]$中,${}_{tiny{W}}a$和${}_{tiny{B}} omega_{tiny{WB}}$为常数
$R_{tiny{WB}} left( t +Delta{t} right) = R_{tiny{WB}} left( t right) Expleft( {}_{tiny{B}} omega_{tiny{WB}} left( t right) Delta{t} right)$
${}_{tiny{W}}Vleft( t + Delta{t} right) ={}_{tiny{W}}Vleft( t right) + {}_{tiny{W}}a left( t right)Delta{t} $
${}_{tiny{W}}P left(t+Delta{t} right) = {}_{tiny{W}}Pleft( t right)+{}_{tiny{W}}V left( t right) Delta{t} + frac{1}{2}{}_{tiny{W}}a left( t right)Delta{t}^2$
以上的公式用IMU测量值表示:
$R left( t +Delta{t} right) = R left( t right) Expleft( left( tilde{ omega } left( t right) - b^gleft( t right) - eta^{gd} left( t right) right) Delta{t}right)$
$V left( t +Delta{t} right) = V left( t right) +gDelta{t}+Rleft( t right) left( tilde{ a } left( t right) - b^{a}left( t right) - eta^{ad}left( t right) right) Delta {t}$
$P left(t+Delta{t} right) = Pleft( t right) + V left( t right)Delta{t} + frac{1}{2} gDelta{t}^2 +frac{1}{2}Rleft( t right) left( tilde{ a } left( t right) - b^{a}left( t right) - eta^{ad}left( t right) right) Delta {t}^2$
IMU预积分
给定初值,在i和j时刻对IMU的角速度和加速度进行积分,可以计算j时刻相对于i时刻的姿态:
$R_{j} = R_{i}prodlimits_{k=i}limits^{j-1}Expleft( left( tilde{ omega }_{k} - b^g_{k}- eta^{gd}_{k} right) Delta{t} right)$
$V_{j} = V_{i}+ gDelta{t_{ij}}+ sumlimits_{k=i}limits^{j-1}R_kleft( tilde{ a }_{k} - b^a_{k}- eta^{ad}_{k} right) Delta{t}$
$P_{j} = P_{i}+ sumlimits_{k=i}limits^{j-1}left[V_kDelta{t} + frac{1}{2}gDelta{t}^2 + frac{1}{2}R_kleft( tilde{ a }_{k} - b^a_{k}- eta^{ad}_{k} right) Delta{t}^2 right]$
在preintegration理论中需要初值($R_i$,$V_i$,$P_i$)和常数项(包含重力g的项)分离出来。
(1)
$Delta{R_{ij}} = R_{i}^{T}R_j=prodlimits_{k=i}limits^{j-1}Expleft( left( tilde{ omega }_{k} - b^g_{k}- eta^{gd}_{k} right) Delta{t} right)$
$Delta{V_{ij}} = R_{i}^{T}left( V_j - V_i - gDelta{t_{ij}} right)= sumlimits_{k=i}limits^{j-1}Delta{R_{ik}}left( tilde{ a }_{k} - b^a_{k}- eta^{ad}_{k} right) Delta{t}$
$Delta{P_{ij}} = R_{i}^{T}left( P_j - P_i -V_iDelta{t_{ij}}-frac{1}{2} gDelta{t_{ij}^2} right)=sumlimits_{k=i}limits^{j-1}left[Delta{V_{ik}}Delta{t}+frac{1}{2}Delta{R_{ik}}left( tilde{ a }_{k} - b^a_{k}- eta^{ad}_{k} right) Delta{t}^2right]$
其中$Delta{R_{ij}}$,$Delta{V_{ij}}$,$Delta{P_{ij}}$即为preintegration measurement,即不考虑初值以及重力加速度项的相对测量。注意到这项项包含有噪声$eta$,我们也需要将它们分离出来,在分离的过程中发现preintegration measurement是近似服从高斯分布的,即
(2)
$Deltatilde{R}_{ij} approx Delta{R_{ij}}Expleft( delta phi_{ij} right) =prodlimits_{k=i}limits^{j-1}Expleft( left( tilde{ omega }_{k} - b^g_{k} right) Delta{t} right)$
$Deltatilde{V}_{ij} approx Delta{V_{ij}}+delta{V_{ij}} = sumlimits_{k=i}limits^{j-1}Delta{tilde{R}_{ik}}left( tilde{ a }_{k} - b^a_{k} right) Delta{t}$
$Deltatilde{P}_{ij} approx Delta{P_{ij}}+delta{P_{ij}}=sumlimits_{k=i}limits^{j-1}left[Delta{tilde{V}_{ik}}Delta{t}+frac{1}{2}Delta{tilde{R}_{ik}}left( tilde{ a }_{k} - b^a_{k} right) Delta{t}^2right]$
最终可得预积分测量模型(其中$Expleft(-deltaphi_{ij}right)^T = Expleft(deltaphi_{ij}right)$)
(3)
$Deltatilde{R}_{ij} = R_{i}^{T}R_jExpleft( delta phi_{ij} right)$
$Deltatilde{V}_{ij} = R_{i}^{T}left( V_j - V_i - gDelta{t_{ij}} right)+delta{V_{ij}}$
$Deltatilde{P}_{ij} = R_{i}^{T}left( P_j - P_i -V_iDelta{t_{ij}}-frac{1}{2} gDelta{t_{ij}^2} right)+delta{P_{ij}}$
偏差更新
(4)
$Deltatilde{R}_{ij}left( b_i^gright) =prodlimits_{k=i}limits^{j-1}Expleft( left( tilde{ omega }_{k} -bar{b}^g_{i} -delta{b_i^g}right) Delta{t} right) simeq Deltatilde{R}_{ij}left( bar{b}_i^gright) Expleft(frac{partialDeltabar{R}_{ij}} {partial{b^g}} delta{b^g_i} right)$
$Deltatilde{V}_{ij}left( b_i^g,b_i^a right) =sumlimits_{k=i}limits^{j-1}Delta{tilde{R}_{ik}}left(b_i^gright)left( tilde{ a }_{k} - bar{b}^a_{i} -delta{b}_i^a right) Delta{t} simeq Deltatilde{V}_{ij}left( bar{b}_i^g,bar{b}_i^aright) +frac{partialDeltabar{V}_{ij}} {partial{b^g}} delta{b^g_i} + frac{partialDeltabar{V}_{ij}} {partial{b^a}} delta{b^a_i}$
$Deltatilde{P}_{ij}left( b_i^g,b_i^a right)= sumlimits_{k=i}limits^{j-1}left[Delta{tilde{V}_{ik}}left( b_i^g,b_i^a right)Delta{t}+frac{1}{2}Delta{tilde{R}_{ik}}left( b_i^gright)left( tilde{ a }_{k} - bar{b}^a_{i} -delta{b}_i^a right) Delta{t}^2right] simeq Deltatilde{P}_{ij}left( bar{b}_i^g,bar{b}_i^aright) +frac{partialDeltabar{P}_{ij}} {partial{b^g}} delta{b^g_i} + frac{partialDeltabar{P}_{ij}} {partial{b^a}} delta{b^a_i}$
$Deltatilde{R}_{ij}left( bar{b}_i^gright)$,$Deltatilde{V}_{ij}left( bar{b}_i^g,bar{b}_i^aright)$,$Deltatilde{P}_{ij}left( bar{b}_i^g,bar{b}_i^aright)$为偏置未更新的时的值,后半部分为偏置更新后的影响。
在之前的预积分推导中我们假设i和j之间的偏置是不变的(即偏置的下标为i而不是会变化的k),但是在优化过程中偏置的估计会被一个小增量$delta{b}$更新,将$bgetsbar{b}+delta{b}$代入(2)中得(4)的左半部分,对i和j之间的测量进行积分,但是这不是最高效的,所以我们采取用一阶泰勒展开的方式得(4)的右半部分,其中右半部分中的雅可比(在$bar{b_i}$处计算所得)描述了由于估计的偏置的变化而引起的变化。
残差
$r_{Delta{R_{ij}}} = Logleft( left( Deltatilde{R}_{ij}left( bar{b}_i^gright) Expleft(frac{partialDeltabar{R}_{ij}} {partial{b^g}} delta{b^g} right) right) ^T R_i^T{R_j}right)$
$r_{Delta{V_{ij}}} = R_{i}^{T}left( V_j - V_i - gDelta{t_{ij}} right) - left[Deltatilde{V}_{ij}left( bar{b}_i^g,bar{b}_i^aright) +frac{partialDeltabar{V}_{ij}} {partial{b^g}} delta{b^g} + frac{partialDeltabar{V}_{ij}} {partial{b^a}} delta{b^a} right]$
$r_{Delta{P_{ij}}} = R_{i}^{T}left( P_j - P_i -V_iDelta{t_{ij}}-frac{1}{2} gDelta{t_{ij}^2} right) - left[ Deltatilde{P}_{ij}left( bar{b}_i^g,bar{b}_i^aright) +frac{partialDeltabar{P}_{ij}} {partial{b^g}} delta{b^g} + frac{partialDeltabar{P}_{ij}} {partial{b^a}} delta{b^a} right]$
其中被减数为(1)的左半部分,减数为(4)的右半部分。
迭代噪声传播
噪声向量$eta_{ij}^Delta = left[ deltaphi^T_{ij}, delta{V}^T_{ij},delta{P}^T_{ij} right]^T sim mathcal{N} left( 0_{9X1},sum_{ij} right)$
给出递推结果:
$deltaphi_{i,j} backsimeq Delta tilde{R}_{j-1,j}^Tdeltaphi_{i,j-1}+J_r^{j-1}eta_{j-1}^{gd}Delta{t}$
$delta{V_{i,j}} backsimeq delta{V_{i,j-1}} - Delta{tilde{R}_{i,j-1}} left( tilde{a}_{j-1}-b^a_i right)^{wedge}deltaphi_{i,j-1}Delta{t}+Deltatilde{R}_{i,j-1}eta_{j-1}^{ad}Delta{t}$
$delta{P_{i,j}} backsimeq delta{P_{i,j-1}} + delta{V_{i,j-1}}Delta{t} - frac{1}{2}Delta{tilde{R}_{i,j-1}} left( tilde{a}_{j-1}-b^a_i right)^{wedge}deltaphi_{i,j-1}Delta{t}^2 + frac{1}{2}Deltatilde{R}_{i,j-1}eta_{j-1}^{ad}Delta{t}^2$
写成矩阵形式:
$begin{bmatrix}deltaphi_{i,j} \delta{V}_{i,j} \delta{P}_{i,j}end{bmatrix}= A_{j-1}begin{bmatrix}deltaphi_{i,j-1} \delta{V}_{i,j-1} \delta{P}_{i,j-1}end{bmatrix}+B_{j-1}eta_{j-1}^{gd}+C_{j-1}eta_{j-1}^{ad}$这是线性模型
其中
$A_{j-1}=begin{bmatrix} Delta tilde{R}_{j-1,j}^T & 0_{3X3} & 0_{3X3} \ -Delta{tilde{R}_{i,j-1}} left( tilde{a}_{j-1}-b^a_i right)^{wedge}Delta{t} & 0_{3X3} & I_{3X3} \ - frac{1}{2}Delta{tilde{R}_{i,j-1}} left( tilde{a}_{j-1}-b^a_i right)^{wedge}Delta{t}^2 & I_{3X3} & I_{3X3}Delta{t} end{bmatrix}_{9X9}$
$B_{j-1} = begin{bmatrix}J_r^{j-1}Delta{t} \ 0_{3X3} \ 0_{3X3}end{bmatrix}_{9X3}$
$C_{j-1}=begin{bmatrix}0_{3X3} \ Deltatilde{R}_{i,j-1}Delta{t} \ frac{1}{2}Deltatilde{R}_{i,j-1} Delta{t}^2end{bmatrix}_{9X3}$
而写成协方差形式为:
$sum_{ij}= A_{j-1}sum_{i,j-1}A_{j-1}^T + B_{j-1}eta_{j-1}^{gd}B_{j-1}^T + C_{j-1}eta_{j-1}^{ad}C_{j-1}^T$
(4)的偏差更新中雅可比递推形式如下:
$frac{partialDeltabar{R}_{ij}}{partial{b^g}} = -sum^{j-1}_{k=i}left[ Deltatilde{R}_{k+1,j}left(bar{b}_iright)^T{J_r^k}Delta{t}right] $
$= -sum^{j-1}_{k=i}left[ Deltatilde{R}_{j,k+1}{J_r^k}Delta{t}right] $
推导:$frac{partialDeltabar{R}_{i,j+1}}{partial{b^g}} = -sum^{j}_{k=i}left[ Deltatilde{R}_{j+1,k+1}{J_r^k}Delta{t}right]$
$=- Delta{tilde{R}_{j+1,j}}left[ sum_{k=i}^j Delta{tilde{R}_{j,k+1}}J_r^k Delta{t}right]$
$=- Delta{tilde{R}_{j+1,j}}left[ sum_{k=i}^{j-1} Delta{tilde{R}_{j,k+1}}J_r^k Delta{t} + Delta{tilde{R}_{j,j+1}}J^j_rDelta{t}right]$
$= Delta{tilde{R}_{j+1,j}}left[- sum_{k=i}^{j-1} Delta{tilde{R}_{k+1,j}^T}J_r^k Delta{t}right]-J_r^jDelta{t}$
$= Deltatilde{R}^T_{j,j+1}frac{partialDeltabar{R}_{ij}}{partial{b^g}}-J_r^jDelta{t}$
$frac{partialDeltabar{V}_{ij}}{partial{b^a}} = -sum^{j-1}_{k=i} Deltabar{R}_{ik}Delta{t}$
推导:$frac{partialDeltabar{V}_{i,j+1}}{partial{b^a}} = -sum^{j}_{k=i} Deltabar{R}_{ik}Delta{t}$
$=-left(Deltabar{R}_{ij}Delta{t} + sum^{j-1}_{k=i} Deltabar{R}_{ik}Delta{t}right)$
$= frac{partialDeltabar{V}_{ij}}{partial{b^a}}-Deltabar{R}_{ij}Delta{t}$
$frac{partialDeltabar{V}_{ij}}{partial{b^g}} = -sum^{j-1}_{k=i} Deltabar{R}_{ik} left(tilde{a}_k - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ik}}{partial{b^g}}Delta{t}$
推导:$frac{partialDeltabar{V}_{i,j+1}}{partial{b^g}} = -sum^{j}_{k=i} Deltabar{R}_{ik} left(tilde{a}_k - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ik}}{partial{b^g}}Delta{t}$
$=-Deltabar{R}_{ij} left(tilde{a}_j - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ij}}{partial{b^g}}Delta{t}-sum^{j-1}_{k=i} Deltabar{R}_{ik} left(tilde{a}_k - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ik}}{partial{b^g}}Delta{t}$
$= frac{partialDeltabar{V}_{ij}}{partial{b^g}}-Deltabar{R}_{ij} left(tilde{a}_j - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ij}}{partial{b^g}}Delta{t}$
$frac{partialDeltabar{P}_{ij}}{partial{b^a}} = sum^{j-1}_{k=i} frac{partialDeltabar{V}_{ik}}{partial{b^a}}Delta{t}-frac{1}{2}Deltabar{R}_{ik}Delta{t^2} $
推导:$frac{partialDeltabar{P}_{i,j+1}}{partial{b^a}} = sum^{j}_{k=i} frac{partialDeltabar{V}_{ik}}{partial{b^a}}Delta{t}-frac{1}{2}Deltabar{R}_{ik}Delta{t^2}$
$=frac{partialDeltabar{V}_{ij}}{partial{b^a}}Delta{t}-frac{1}{2}Deltabar{R}_{ij}Delta{t^2}+sum^{j-1}_{k=i} left(frac{partialDeltabar{V}_{ik}}{partial{b^a}}Delta{t}-frac{1}{2}Deltabar{R}_{ik}Delta{t^2}right)$
$= frac{partialDeltabar{P}_{ij}}{partial{b^a}}+left( frac{partialDeltabar{V}_{ij}}{partial{b^a}}Delta{t}-frac{1}{2}Deltabar{R}_{ij}Delta{t^2} right)$
$frac{partialDeltabar{P}_{ij}}{partial{b^g}} = sum^{j-1}_{k=i} frac{partialDeltabar{V}_{ik}}{partial{b^g}}Delta{t}-frac{1}{2}Deltabar{R}_{ik}left(tilde{a}_k - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ik}}{partial{b^g}}Delta{t}^2$
推导:$frac{partialDeltabar{P}_{i,j+1}}{partial{b^g}} = sum^{j}_{k=i} left( frac{partialDeltabar{V}_{ik}}{partial{b^g}}Delta{t}-frac{1}{2}Deltabar{R}_{ik}left(tilde{a}_k - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ik}}{partial{b^g}}Delta{t}^2right)$
$=left(frac{partialDeltabar{V}_{ij}}{partial{b^g}}Delta{t}-frac{1}{2}Deltabar{R}_{ij}left(tilde{a}_j - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ij}}{partial{b^g}}Delta{t}^2right) + sum^{j-1}_{k=i} left( frac{partialDeltabar{V}_{ik}}{partial{b^g}}Delta{t}-frac{1}{2}Deltabar{R}_{ik}left(tilde{a}_k - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ik}}{partial{b^g}}Delta{t}^2 right)$
$=frac{partialDeltabar{P}_{ij}}{partial{b^g}}+ left( frac{partialDeltabar{V}_{ij}}{partial{b^g}}Delta{t}-frac{1}{2}Deltabar{R}_{ij}left(tilde{a}_j - bar{b}_i^aright)^{wedge} frac{partialDeltabar{R}_{ij}}{partial{b^g}}Delta{t}^2 right)$
不含噪声的递推公式
$Deltatilde{P}_{i,j+1} = Deltatilde{P}_{i,j} + Deltatilde{V}_{i,j}Delta{t}+frac{1}{2}Deltatilde{R}_{i,j}left( tilde{a}_j - bar{b}^a_iright)^{wedge}Delta{t^2}$
$Deltatilde{V}_{i,j+1} = Deltatilde{V}_{i,j}+Deltatilde{R}_{i,j}left( tilde{a}_j - bar{b}^a_iright)^{wedge}Delta{t} $
$Deltatilde{R}_{i,j+1} = Deltatilde{R}_{i,j}Expleft[ left( tilde{omega_j} - bar{b_i^g}right)^{wedge}Delta{t}right]$
到此已经知道了delta measurements,jacobians,covariance matrix这三个部分的更新了。
// incrementally update 1)delta measurements, 2)jacobians, 3)covariance matrix // acc: acc_measurement - bias_a, last measurement!! not current measurement // omega: gyro_measurement - bias_g, last measurement!! not current measurement
{ void IMUPreintegrator::update(const Vector3d &omega, const Vector3d &acc, const double &dt) { double dt2 = dt * dt; Matrix3d dR = Expmap(omega * dt);//上一次的测试 Matrix3d Jr = JacobianR(omega * dt); // noise covariance propagation of delta measurements // err_k+1 = A*err_k + B*err_gyro + C*err_acc Matrix3d I3x3 = Matrix3d::Identity(); Matrix<double, 9, 9> A = Matrix<double, 9, 9>::Identity(); A.block<3, 3>(6, 6) = dR.transpose(); A.block<3, 3>(3, 6) = -_delta_R * skew(acc) * dt; A.block<3, 3>(0, 6) = -0.5 * _delta_R * skew(acc) * dt2; A.block<3, 3>(0, 3) = I3x3 * dt; Matrix<double, 9, 3> Bg = Matrix<double, 9, 3>::Zero(); Bg.block<3, 3>(6, 0) = Jr * dt; Matrix<double, 9, 3> Ca = Matrix<double, 9, 3>::Zero(); Ca.block<3, 3>(3, 0) = _delta_R * dt; Ca.block<3, 3>(0, 0) = 0.5 * _delta_R * dt2; //协方差 _cov_P_V_Phi = A * _cov_P_V_Phi * A.transpose() + Bg * IMUData::getGyrMeasCov() * Bg.transpose() + Ca * IMUData::getAccMeasCov() * Ca.transpose(); // jacobian of delta measurements w.r.t bias of gyro/acc // update P first, then V, then R _J_P_Biasa += _J_V_Biasa * dt - 0.5 * _delta_R * dt2; _J_P_Biasg += _J_V_Biasg * dt - 0.5 * _delta_R * skew(acc) * _J_R_Biasg * dt2; _J_V_Biasa += -_delta_R * dt; _J_V_Biasg += -_delta_R * skew(acc) * _J_R_Biasg * dt; _J_R_Biasg = dR.transpose() * _J_R_Biasg - Jr * dt; // delta measurements, position/velocity/rotation(matrix) // update P first, then V, then R. because P's update need V&R's previous state _delta_P += _delta_V * dt + 0.5 * _delta_R * acc * dt2; // P_k+1 = P_k + V_k*dt + R_k*a_k*dt*dt/2 _delta_V += _delta_R * acc * dt; _delta_R = normalizeRotationM(_delta_R * dR); // normalize rotation, in case of numerical error accumulation // // noise covariance propagation of delta measurements // // err_k+1 = A*err_k + B*err_gyro + C*err_acc // Matrix3d I3x3 = Matrix3d::Identity(); // MatrixXd A = MatrixXd::Identity(9,9); // A.block<3,3>(6,6) = dR.transpose(); // A.block<3,3>(3,6) = -_delta_R*skew(acc)*dt; // A.block<3,3>(0,6) = -0.5*_delta_R*skew(acc)*dt2; // A.block<3,3>(0,3) = I3x3*dt; // MatrixXd Bg = MatrixXd::Zero(9,3); // Bg.block<3,3>(6,0) = Jr*dt; // MatrixXd Ca = MatrixXd::Zero(9,3); // Ca.block<3,3>(3,0) = _delta_R*dt; // Ca.block<3,3>(0,0) = 0.5*_delta_R*dt2; // _cov_P_V_Phi = A*_cov_P_V_Phi*A.transpose() + // Bg*IMUData::getGyrMeasCov*Bg.transpose() + // Ca*IMUData::getAccMeasCov()*Ca.transpose(); // delta time _delta_time += dt; }
}
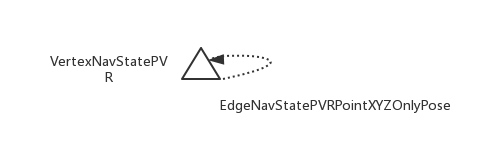
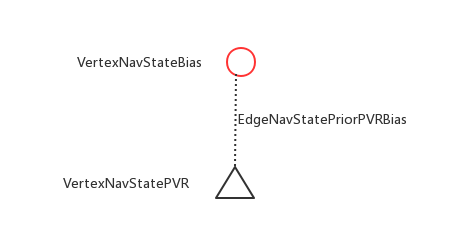
下面按照图优化的思路,建立VIO的图模型
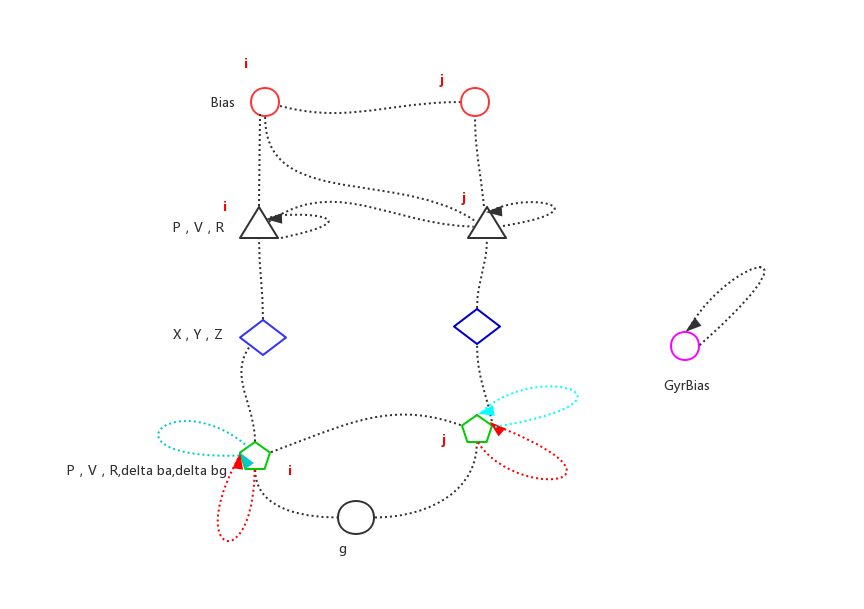
图优化的模型如上图所示。
红色圆形节点中的量为$delta{b^a}$,$delta{b^g}$,因为$bgetsbar{b}+delta{b}$,所以$delta{b}$被优化后相当于偏置也被更新了。
三角形黑色节点的量为IMU的状态,(R,P,V)。
四边形蓝色节点的量为世界坐标下的三维点坐标,(X,Y,Z)。
青色的五边形节点的量为(R,P,V,$delta{b^a}$,$delta{b^g}$)
黑色的圆形节点的量为世界坐标系下的重力加速度g。
紫色的圆形节点的量为陀螺仪的偏置$b^g$
各边的误差,及雅可比计算
参考ORB-YGZ-SLAM中设置节点与边的方式
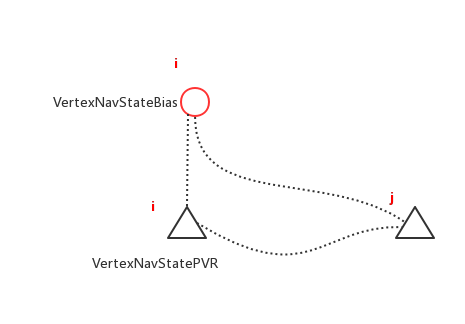
误差函数为论文【1】中公式45
$r_{Delta{R_{ij}}} = Logleft( left( Deltatilde{R}_{ij}left( bar{b}_i^gright) Expleft(frac{partialDeltabar{R}_{ij}} {partial{b^g}} delta{b^g} right) right) ^T R_i^T{R_j}right)$
$r_{Delta{V_{ij}}} = R_{i}^{T}left( V_j - V_i - gDelta{t_{ij}} right) - left[Deltatilde{V}_{ij}left( bar{b}_i^g,bar{b}_i^aright) +frac{partialDeltabar{V}_{ij}} {partial{b^g}} delta{b^g} + frac{partialDeltabar{V}_{ij}} {partial{b^a}} delta{b^a} right]$
$r_{Delta{P_{ij}}} = R_{i}^{T}left( P_j - P_i -V_iDelta{t_{ij}}-frac{1}{2} gDelta{t_{ij}^2} right) - left[ Deltatilde{P}_{ij}left( bar{b}_i^g,bar{b}_i^aright) +frac{partialDeltabar{P}_{ij}} {partial{b^g}} delta{b^g} + frac{partialDeltabar{P}_{ij}} {partial{b^a}} delta{b^a} right]$
误差程序实现
void EdgeNavStatePVR::computeError() { // const VertexNavStatePVR *vPVRi = static_cast<const VertexNavStatePVR *>(_vertices[0]); const VertexNavStatePVR *vPVRj = static_cast<const VertexNavStatePVR *>(_vertices[1]); const VertexNavStateBias *vBiasi = static_cast<const VertexNavStateBias *>(_vertices[2]); // terms need to computer error in vertex i, except for bias error const NavState &NSPVRi = vPVRi->estimate(); Vector3d Pi = NSPVRi.Get_P(); Vector3d Vi = NSPVRi.Get_V(); SO3d Ri = NSPVRi.Get_R(); // Bias from the bias vertex const NavState &NSBiasi = vBiasi->estimate(); Vector3d dBgi = NSBiasi.Get_dBias_Gyr(); Vector3d dBai = NSBiasi.Get_dBias_Acc(); // terms need to computer error in vertex j, except for bias error const NavState &NSPVRj = vPVRj->estimate(); Vector3d Pj = NSPVRj.Get_P(); Vector3d Vj = NSPVRj.Get_V(); SO3d Rj = NSPVRj.Get_R(); // IMU Preintegration measurement const IMUPreintegrator &M = _measurement; //预积分类,实际值 double dTij = M.getDeltaTime(); // Delta Time double dT2 = dTij * dTij; Vector3d dPij = M.getDeltaP(); // Delta Position pre-integration measurement //测量出来的实际deltaP Vector3d dVij = M.getDeltaV(); // Delta Velocity pre-integration measurement Sophus::SO3d dRij = Sophus::SO3(M.getDeltaR()); // Delta Rotation pre-integration measurement // tmp variable, transpose of Ri Sophus::SO3d RiT = Ri.inverse(); // residual error of Delta Position measurement Vector3d rPij = RiT * (Pj - Pi - Vi * dTij - 0.5 * GravityVec * dT2) - (dPij + M.getJPBiasg() * dBgi + M.getJPBiasa() * dBai); // this line includes correction term of bias change. // residual error of Delta Velocity measurement Vector3d rVij = RiT * (Vj - Vi - GravityVec * dTij) - (dVij + M.getJVBiasg() * dBgi + M.getJVBiasa() * dBai); //this line includes correction term of bias change // residual error of Delta Rotation measurement Sophus::SO3d dR_dbg = Sophus::SO3d::exp(M.getJRBiasg() * dBgi); Sophus::SO3d rRij = (dRij * dR_dbg).inverse() * RiT * Rj; Vector3d rPhiij = rRij.log(); Vector9d err; // typedef Matrix<double, D, 1> ErrorVector; ErrorVector _error; D=9 err.setZero(); // 9-Dim error vector order: // position-velocity-rotation // rPij - rVij - rPhiij err.segment<3>(0) = rPij; // position error err.segment<3>(3) = rVij; // velocity error err.segment<3>(6) = rPhiij; // rotation phi error _error = err; }
雅克比
对3个部分的误差$left[r_{Delta{P_{ij}}},r_{Delta{V_{ij}}} , r_{Delta{R_{ij}}}right]$求8个部分的被优化项$left[{P_i}, {V_i},{phi_i},{P_j}, {V_j},{phi_j},tilde{delta}b_i^g,tilde{delta}b_i^aright]$的雅克比,总共24个部分。
i:
$frac{partial{r}_{Delta{P_{ij}}}}{partialdelta{P_i}} = -I_{3X1} $ , $ frac{partial{r}_{Delta{V_{ij}}}}{partialdelta{P_i}} = 0$, $ frac{partial{r}_{Delta{R_{ij}}}}{partialdelta{P_i}} = 0$
$frac{partial{r}_{Delta{P_{ij}}}}{partialdelta{V_i}} = -R_i^TDelta{t}_{ij}$, $frac{partial{r}{_Delta{V_{ij}}}}{partialdelta{V_i}} = -R_i^T$, $frac{partial{r}_{Delta{R_{ij}}}}{partialdelta{V_i}} = 0$
$frac{partial{r}_{Delta{P_{ij}}}}{partialdelta{phi_i}} = left( R_i^T left( P_j-P_i-V_iDelta{t_{ij}}-frac{1}{2}gDelta{t_{ij}^2}right)right)^{wedge}$, $frac{partial{r}_{Delta{V_{ij}}}}{partialdelta{phi_i}}=left(R_i^Tleft( V_j- V_i-gDelta{t_{ij}}right)right)^{wedge}$, $frac{partial{r}_{Delta{R_{ij}}}}{partialdelta{phi_i}} = -J_r^{-1}left(r{}_{Delta{R}}left(R_iright)right)R^T_j{R_i}$
j:
$frac{partial{r}_{Delta{P_{ij}}}}{partialdelta{P_j}} = R_i^T{R_j}$, $frac{partial{r}_{Delta{V_{ij}}}}{partialdelta{P_j}} = 0$, $frac{partial{r}_{Delta{R_{ij}}}}{partialdelta{P_j}} = 0$
$frac{partial{r}_{Delta{P_{ij}}}}{partialdelta{V_j}} = 0$, $frac{partial{r}_{Delta{V_{ij}}}}{partialdelta{V_j}} = R_i^T$, $frac{partial{r}_{Delta{R_{ij}}}}{partialdelta{V_j}} = 0$
$frac{partial{r}_{Delta{P_{ij}}}}{partialdelta{phi_j}} = 0$, $frac{partial{r}_{Delta{V_{ij}}}}{partialdelta{phi_j}} = 0$, $frac{partial{r}_{Delta{R_{ij}}}}{partialdelta{phi_j}} = J_r^{-1}left(r{}_{Delta{R}}left(R_jright)right)$
$tilde{delta}{b^g_i}$,$tilde{delta}{b^a_i}$:
$frac{partial{r_{Delta{P_{ij}}}}}{partialtilde{delta}{b^g_i}}=-frac{partialDeltabar{P}_{ij}}{partial{b_i^g}}$, $frac{partial{r_{Delta{V_{ij}}}}}{partialtilde{delta}{b^g_i}}=-frac{partialDeltabar{V}_{ij}}{partial{b_i^g}}$,$frac{partial{r_{Delta{R_{ij}}}}}{partialtilde{delta}{b^g_i}}=alpha$
$frac{partial{r_{Delta{P_{ij}}}}}{partialtilde{delta}{b^a_i}}=-frac{partialDeltabar{P}_{ij}}{partial{b_i^a}}$, $frac{partial{r_{Delta{V_{ij}}}}}{partialtilde{delta}{b^a_i}}=-frac{partialDeltabar{V}_{ij}}{partial{b_i^a}}$,$frac{partial{r_{Delta{R_{ij}}}}}{partialtilde{delta}{b^a_i}}=0$
其中$alpha = -J_r^{-1}left( r_{Delta{R_{ij}}} left( delta{b}_i^gright)right) Expleft( r_{Delta{R}_{ij}}left(delta{b}_i^gright)right)^T {J}^b_rfrac{partialDeltabar{R}_{ij}}{partial{b^g}}$
雅克比程序实现
void EdgeNavStatePVR::linearizeOplus() { // const VertexNavStatePVR *vPVRi = static_cast<const VertexNavStatePVR *>(_vertices[0]); const VertexNavStatePVR *vPVRj = static_cast<const VertexNavStatePVR *>(_vertices[1]); const VertexNavStateBias *vBiasi = static_cast<const VertexNavStateBias *>(_vertices[2]); // terms need to computer error in vertex i, except for bias error const NavState &NSPVRi = vPVRi->estimate(); Vector3d Pi = NSPVRi.Get_P(); Vector3d Vi = NSPVRi.Get_V(); Matrix3d Ri = NSPVRi.Get_RotMatrix(); // bias const NavState &NSBiasi = vBiasi->estimate(); Vector3d dBgi = NSBiasi.Get_dBias_Gyr();//陀螺仪 // Vector3d dBai = NSBiasi.Get_dBias_Acc(); // terms need to computer error in vertex j, except for bias error const NavState &NSPVRj = vPVRj->estimate(); Vector3d Pj = NSPVRj.Get_P(); Vector3d Vj = NSPVRj.Get_V(); Matrix3d Rj = NSPVRj.Get_RotMatrix(); // IMU Preintegration measurement const IMUPreintegrator &M = _measurement; double dTij = M.getDeltaTime(); // Delta Time double dT2 = dTij * dTij; // some temp variable Matrix3d I3x3 = Matrix3d::Identity(); // I_3x3 Matrix3d O3x3 = Matrix3d::Zero(); // 0_3x3 Matrix3d RiT = Ri.transpose(); // Ri^T Matrix3d RjT = Rj.transpose(); // Rj^T Vector3d rPhiij = _error.segment<3>(6); // residual of rotation, rPhiij Matrix3d JrInv_rPhi = Sophus::SO3::JacobianRInv(rPhiij); // inverse right jacobian of so3 term #rPhiij# Matrix3d J_rPhi_dbg = M.getJRBiasg(); // jacobian of preintegrated rotation-angle to gyro bias i // 1. // increment is the same as Forster 15'RSS // pi = pi + Ri*dpi, pj = pj + Rj*dpj // vi = vi + dvi, vj = vj + dvj // Ri = Ri*Exp(dphi_i), Rj = Rj*Exp(dphi_j) // Note: the optimized bias term is the 'delta bias' // dBgi = dBgi + dbgi_update, dBgj = dBgj + dbgj_update // dBai = dBai + dbai_update, dBaj = dBaj + dbaj_update // 2. // 9-Dim error vector order in PVR: // position-velocity-rotation // rPij - rVij - rPhiij // Jacobian row order: // J_rPij_xxx // J_rVij_xxx // J_rPhiij_xxx // 3. // order in 'update_' in PVR // Vertex_i : dPi, dVi, dPhi_i // Vertex_j : dPj, dVj, dPhi_j // 6-Dim error vector order in Bias: // dBiasg_i - dBiasa_i // 4. // For Vertex_PVR_i Matrix<double, 9, 9> JPVRi; JPVRi.setZero(); // 4.1 // J_rPij_xxx_i for Vertex_PVR_i JPVRi.block<3, 3>(0, 0) = -I3x3; //J_rP_dpi JPVRi.block<3, 3>(0, 3) = -RiT * dTij; //J_rP_dvi JPVRi.block<3, 3>(0, 6) = Sophus::SO3::hat( RiT * (Pj - Pi - Vi * dTij - 0.5 * GravityVec * dT2)); //J_rP_dPhi_i // 4.2 // J_rVij_xxx_i for Vertex_PVR_i JPVRi.block<3, 3>(3, 0) = O3x3; //dpi JPVRi.block<3, 3>(3, 3) = -RiT; //dvi JPVRi.block<3, 3>(3, 6) = Sophus::SO3::hat(RiT * (Vj - Vi - GravityVec * dTij)); //dphi_i // 4.3 // J_rPhiij_xxx_i for Vertex_PVR_i Matrix3d ExprPhiijTrans = Sophus::SO3::exp(rPhiij).inverse().matrix(); Matrix3d JrBiasGCorr = Sophus::SO3::JacobianR(J_rPhi_dbg * dBgi); JPVRi.block<3, 3>(6, 0) = O3x3; //dpi JPVRi.block<3, 3>(6, 3) = O3x3; //dvi JPVRi.block<3, 3>(6, 6) = -JrInv_rPhi * RjT * Ri; //dphi_i // 5. // For Vertex_PVR_j Matrix<double, 9, 9> JPVRj; JPVRj.setZero(); // 5.1 // J_rPij_xxx_j for Vertex_PVR_j JPVRj.block<3, 3>(0, 0) = RiT * Rj; //dpj JPVRj.block<3, 3>(0, 3) = O3x3; //dvj JPVRj.block<3, 3>(0, 6) = O3x3; //dphi_j // 5.2 // J_rVij_xxx_j for Vertex_PVR_j JPVRj.block<3, 3>(3, 0) = O3x3; //dpj JPVRj.block<3, 3>(3, 3) = RiT; //dvj JPVRj.block<3, 3>(3, 6) = O3x3; //dphi_j // 5.3 // J_rPhiij_xxx_j for Vertex_PVR_j JPVRj.block<3, 3>(6, 0) = O3x3; //dpj JPVRj.block<3, 3>(6, 3) = O3x3; //dvj JPVRj.block<3, 3>(6, 6) = JrInv_rPhi; //dphi_j // 6. // For Vertex_Bias_i Matrix<double, 9, 6> JBiasi; JBiasi.setZero(); // 5.1 // J_rPij_xxx_j for Vertex_Bias_i JBiasi.block<3, 3>(0, 0) = -M.getJPBiasg(); //J_rP_dbgi JBiasi.block<3, 3>(0, 3) = -M.getJPBiasa(); //J_rP_dbai // J_rVij_xxx_j for Vertex_Bias_i JBiasi.block<3, 3>(3, 0) = -M.getJVBiasg(); //dbg_i JBiasi.block<3, 3>(3, 3) = -M.getJVBiasa(); //dba_i // J_rPhiij_xxx_j for Vertex_Bias_i JBiasi.block<3, 3>(6, 0) = -JrInv_rPhi * ExprPhiijTrans * JrBiasGCorr * J_rPhi_dbg; //dbg_i JBiasi.block<3, 3>(6, 3) = O3x3; //dba_i // Evaluate _jacobianOplus _jacobianOplus[0] = JPVRi; _jacobianOplus[1] = JPVRj; _jacobianOplus[2] = JBiasi; }
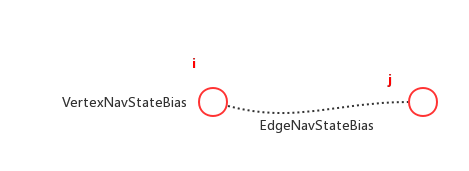
偏置误差
$r = begin{bmatrix} left(b_j^g+delta b_j^gright) - left( b_i^g+delta b_i^gright) \ left(b_j^a+delta b_j^aright) - left( b_i^a+delta b_i^aright) end{bmatrix}$
误差程序实现
void EdgeNavStateBias::computeError() { const VertexNavStateBias *vBiasi = static_cast<const VertexNavStateBias *>(_vertices[0]); const VertexNavStateBias *vBiasj = static_cast<const VertexNavStateBias *>(_vertices[1]); const NavState &NSi = vBiasi->estimate(); const NavState &NSj = vBiasj->estimate(); // residual error of Gyroscope's bias, Forster 15'RSS Vector3d rBiasG = (NSj.Get_BiasGyr() + NSj.Get_dBias_Gyr()) - (NSi.Get_BiasGyr() + NSi.Get_dBias_Gyr()); // residual error of Accelerometer's bias, Forster 15'RSS Vector3d rBiasA = (NSj.Get_BiasAcc() + NSj.Get_dBias_Acc()) //不是估计值与实际值之差,而是前后之差 - (NSi.Get_BiasAcc() + NSi.Get_dBias_Acc()); Vector6d err; // typedef Matrix<double, D, 1> ErrorVector; ErrorVector _error; D=6 err.setZero(); // 6-Dim error vector order: //error是六维的 // deltabiasGyr_i-deltabiasAcc_i // rBiasGi - rBiasAi err.segment<3>(0) = rBiasG; // bias gyro error err.segment<3>(3) = rBiasA; // bias acc error _error = err; }
被优化项
节点i: $left[ delta b_i^g,delta b_i^aright]$,节点j: $left[ delta b_j^g, delta b_j^a right]$
偏置雅克比
$frac{partial r}{partial left[ delta b_i^g,delta b_i^aright] } = begin{bmatrix} -I_3 & 0 \ 0 & -I_3 end{bmatrix}$,$frac{partial r}{partial left[ delta b_j^g,delta b_j^aright] } = begin{bmatrix} I_3 & 0 \ 0 & I_3 end{bmatrix}$
雅克比代码实现
void EdgeNavStateBias::linearizeOplus() { // 6-Dim error vector order: // deltabiasGyr_i-deltabiasAcc_i // rBiasGi - rBiasAi _jacobianOplusXi = -Matrix<double, 6, 6>::Identity(); _jacobianOplusXj = Matrix<double, 6, 6>::Identity(); }
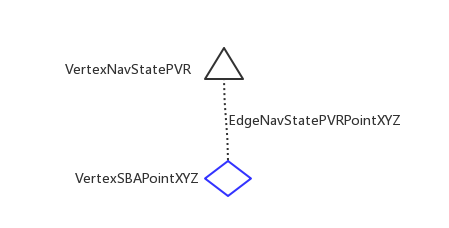
世界坐标系中空间点三维坐标经IMU坐标系转为像素二维坐标:
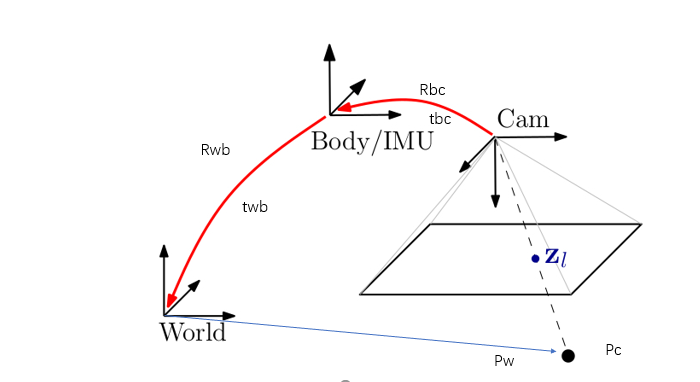
$P_b = left(R_{bc}P_c + t_{bc}right), P_w = left( R_{wb}P_b + t_{wb}right)$
$P_w = R_{wb}left( R_{bc}P_c + t_{bc}right) + t_{wb}$
$P_c = R_{cb}left[ R_{wb}^T left( P_w - t_{wb}right) - t_{bc}right]$
投影误差
_error = _measurement(测量值) - p(像素坐标估计值)
设$P_w = left[ X, Y, Zright]$,$P_c = left[X^{'},Y^{'},Z^{'}right]$
$p = begin{bmatrix} u \ v end{bmatrix} = begin{bmatrix} f_xleft( frac{X^{'}}{Z^{'}}right)+c_x \ f_yleft( frac{Y^{'}}{Z^{'}}right)+c_y end{bmatrix} $
投影误差代码实现
void computeError() { Vector3d Pc = computePc(); Vector2d obs(_measurement);//像素坐标,实际 _error = obs - cam_project(Pc);//Pc为在相机坐标系下三维点,cam_project()将Pc转为像素坐标,误差为二维 } bool isDepthPositive() { Vector3d Pc = computePc(); return Pc(2) > 0.0; } Vector3d computePc() { const VertexSBAPointXYZ *vPoint = static_cast<const VertexSBAPointXYZ *>(_vertices[0]);//三维点 const VertexNavStatePVR *vNavState = static_cast<const VertexNavStatePVR *>(_vertices[1]);//imu,p,v,r const NavState &ns = vNavState->estimate(); Matrix3d Rwb = ns.Get_RotMatrix(); //矩阵形式 Vector3d Pwb = ns.Get_P(); const Vector3d &Pw = vPoint->estimate(); Matrix3d Rcb = Rbc.transpose();//相机与imu之间的关系 Vector3d Pc = Rcb * Rwb.transpose() * (Pw - Pwb) - Rcb * Pbc; return Pc; } inline Vector2d project2d(const Vector3d &v) const {//相机坐标系下三维点转为均一化坐标 Vector2d res; res(0) = v(0) / v(2); res(1) = v(1) / v(2); return res; }
雅克比
优化项:$P_w$
$frac{partial{error}}{partial{P_w}}=-frac{partial{p}}{partial{P_w}} =-frac{partial{p}}{partial{P_c}}frac{partial P_c}{partial P_w} $
$frac{partial p}{partial P_c} = begin{bmatrix} f_xfrac{1}{Z^{'}} & 0 & -f_xfrac{X^{'}}{Z^{'2}} \ 0 & f_yfrac{1}{Z^{'}} & -f_yfrac{Y^{'}}{Z^{'2}} end{bmatrix} $, $frac{partial P_c}{partial P_w} = R_{cb}R_{wb}^T$
优化项:$left[ delta P , delta V , delta R right] = left[ delta P_{wb}, delta V_{wb} , delta R_{wb} right] $
$ frac{partial{error}}{partial{ left[ delta P_{wb}, delta V_{wb} , delta R_{wb} right] }}=-frac{partial{p}}{partial{ left[ delta P_{wb}, delta V_{wb} , delta R_{wb} right] }} = -frac{partial{p}}{partial{P_c}}frac{partial P_c}{partial left[ delta P_{wb}, delta V_{wb} , delta R_{wb} right] }$
$frac{partial P_c}{partial delta P_{wb}} = lim_limits{delta P_{wb}to 0}frac{ R_{cb}left[ R_{wb}^T left( P_w - left( P_{wb} + R_{wb}delta P_{wb} right) right) - P_{bc}right] -R_{cb}left[ R_{wb}^T left( P_w - P_{wb} right) - P_{bc}right] } {delta P_{wb}} = -R_{cb}$, $ P_w$为世界坐标系下三维点坐标。
$frac{partial P_c}{partial delta V_{wb}} = 0$
$frac{partial P_c}{partial delta phi_{wb}} = lim_limits{delta phi_{wb}to 0}frac{ R_{cb}left[ left( R_{wb}Expleft( delta phi_{wb}^{wedge} right) right)^T left( P_w - P_{wb} right) - P_{bc}right] -R_{cb}left[ R_{wb}^T left( P_w - P_{wb} right) - P_{bc}right] } {delta phi_{wb}} = lim_limits{delta phi_{wb}to 0}frac{ R_{cb}left[ left( Expleft( delta phi _{wb}^{wedge} right)right)^T R_{wb}^T left( P_w - P_{wb} right) - P_{bc}right] -R_{cb}left[ R_{wb}^T left( P_w - P_{wb} right) - P_{bc}right] } {delta phi_{wb}} $
$ = lim_limits{delta phi_{wb}to 0}frac{ R_{cb}left[ left( I - delta phi_{wb} ^{wedge} right) R_{wb}^T left( P_w - P_{wb} right) - P_{bc}right] -R_{cb}left[ R_{wb}^T left( P_w - P_{wb} right) - P_{bc}right] } {delta phi_{wb}} = lim_limits{delta phi_{wb}to 0}frac{ -R_{cb}left[ delta phi_{wb} ^{wedge} R_{wb}^T left( P_w - P_{wb} right) right] } {delta phi_{wb}}=lim_limits{delta phi_{wb}to 0}frac{ -R_{cb} R_{wb}^T left( R_{wb} delta phi_{wb} right)^{wedge} left( P_w - P_{wb} right) } {delta phi_{wb}}$
$= lim_limits{delta phi_{wb}to 0}frac{ R_{cb} R_{wb}^T left( P_w - P_{wb} right) ^{wedge} left( R_{wb} delta phi_{wb} right) } {delta phi_{wb}} = lim_limits{delta phi_{wb}to 0}frac{ left[ R_{cb} R_{wb}^T left( P_w - P_{wb} right) right] ^{wedge} R_{cb} R_{wb}^Tleft( R_{wb} delta phi_{wb} right) } {delta phi_{wb}}$
$= left[ R_{cb}R_{wb}^T left(P_w-P_{wb}right)right]^{wedge}R_{cb}$ 推导用到伴随矩阵的性质,和论文公式(2)
雅克比程序实现:
void EdgeNavStatePVRPointXYZ::linearizeOplus() {
const VertexSBAPointXYZ *vPoint = static_cast<const VertexSBAPointXYZ *>(_vertices[0]);
const VertexNavStatePVR *vNavState = static_cast<const VertexNavStatePVR *>(_vertices[1]);
const NavState &ns = vNavState->estimate();
Matrix3d Rwb = ns.Get_RotMatrix();
Vector3d Pwb = ns.Get_P();
const Vector3d &Pw = vPoint->estimate();
Matrix3d Rcb = Rbc.transpose();
Vector3d Pc = Rcb * Rwb.transpose() * (Pw - Pwb) - Rcb * Pbc;
double x = Pc[0];
double y = Pc[1];
double z = Pc[2];
// Jacobian of camera projection
Matrix<double, 2, 3> Maux;
Maux.setZero();
Maux(0, 0) = fx;
Maux(0, 1) = 0;
Maux(0, 2) = -x / z * fx;
Maux(1, 0) = 0;
Maux(1, 1) = fy;
Maux(1, 2) = -y / z * fy;
Matrix<double, 2, 3> Jpi = Maux / z;
// error = obs - pi( Pc )
// Pw <- Pw + dPw,
for Point3D
// Rwb <- Rwb*exp(dtheta),
for NavState.R
// Pwb <- Pwb + Rwb*dPwb,
for NavState.P
// Jacobian of error w.r.t Pw
_jacobianOplusXi = -Jpi * Rcb * Rwb.transpose();//空间三维点对误差函数求偏导
// Jacobian of Pc/error w.r.t dPwb
Matrix<double, 2, 3> JdPwb = -Jpi * (-Rcb);//求NavState中P的偏导
??
// Jacobian of Pc/error w.r.t dRwb
Vector3d Paux = Rcb * Rwb.transpose() * (Pw - Pwb);
Matrix<double, 2, 3> JdRwb = -Jpi * (Sophus::SO3::hat(Paux) * Rcb);
// ?????
// Jacobian of Pc w.r.t NavState
// order in 'update_': dP, dV, dPhi
Matrix<double, 2, 9> JNavState = Matrix<double, 2, 9>::Zero();
JNavState.block<2, 3>(0, 0) = JdPwb;//跳过了(0.3),其实为对V求偏导,雅克比为0
JNavState.block<2, 3>(0, 6) = JdRwb;
// Jacobian of error w.r.t NavState
_jacobianOplusXj = JNavState;
}
推导同上
误差程序实现:
void computeError() { Vector3d Pc = computePc(); Vector2d obs(_measurement); _error = obs - cam_project(Pc); } bool isDepthPositive() {//是否为正深度 Vector3d Pc = computePc(); return Pc(2) > 0.0; } Vector3d computePc() { const VertexNavStatePVR *vNSPVR = static_cast<const VertexNavStatePVR *>(_vertices[0]); const NavState &ns = vNSPVR->estimate(); Matrix3d Rwb = ns.Get_RotMatrix(); Vector3d Pwb = ns.Get_P(); //const Vector3d& Pw = vPoint->estimate(); Matrix3d Rcb = Rbc.transpose(); Vector3d Pc = Rcb * Rwb.transpose() * (Pw - Pwb) - Rcb * Pbc; return Pc; } inline Vector2d project2d(const Vector3d &v) const { Vector2d res; res(0) = v(0) / v(2); res(1) = v(1) / v(2); return res; } Vector2d cam_project(const Vector3d &trans_xyz) const { Vector2d proj = project2d(trans_xyz); Vector2d res; res[0] = proj[0] * fx + cx; res[1] = proj[1] * fy + cy; return res; } virtual void linearizeOplus(); void SetParams(const double &fx_, const double &fy_, const double &cx_, const double &cy_, const Matrix3d &Rbc_, const Vector3d &Pbc_, const Vector3d &Pw_) { fx = fx_; fy = fy_; cx = cx_; cy = cy_; Rbc = Rbc_; Pbc = Pbc_; Pw = Pw_; } void SetParams(const double &fx_, const double &fy_, const double &cx_, const double &cy_, const SO3d &Rbc_, const Vector3d &Pbc_, const Vector3d &Pw_) { fx = fx_; fy = fy_; cx = cx_; cy = cy_; Rbc = Rbc_.matrix(); Pbc = Pbc_; Pw = Pw_; //Pw是参数? } protected: // Camera intrinsics double fx, fy, cx, cy; // Camera-IMU extrinsics Matrix3d Rbc; Vector3d Pbc; // Point position in world frame Vector3d Pw; };
雅克比程序实现:
void EdgeNavStatePVRPointXYZOnlyPose::linearizeOplus() { const VertexNavStatePVR *vNSPVR = static_cast<const VertexNavStatePVR *>(_vertices[0]); const NavState &ns = vNSPVR->estimate(); Matrix3d Rwb = ns.Get_RotMatrix(); Vector3d Pwb = ns.Get_P(); Matrix3d Rcb = Rbc.transpose(); Vector3d Pc = Rcb * Rwb.transpose() * (Pw - Pwb) - Rcb * Pbc; double x = Pc[0]; double y = Pc[1]; double z = Pc[2]; // Jacobian of camera projection Matrix<double, 2, 3> Maux; Maux.setZero(); Maux(0, 0) = fx; Maux(0, 1) = 0; Maux(0, 2) = -x / z * fx; Maux(1, 0) = 0; Maux(1, 1) = fy; Maux(1, 2) = -y / z * fy; Matrix<double, 2, 3> Jpi = Maux / z; // error = obs - pi( Pc ) // Pw <- Pw + dPw, for Point3D // Rwb <- Rwb*exp(dtheta), for NavState.R // Pwb <- Pwb + Rwb*dPwb, for NavState.P // Jacobian of Pc/error w.r.t dPwb //Matrix3d J_Pc_dPwb = -Rcb; Matrix<double, 2, 3> JdPwb = -Jpi * (-Rcb); //???????????? // Jacobian of Pc/error w.r.t dRwb Vector3d Paux = Rcb * Rwb.transpose() * (Pw - Pwb); Matrix<double, 2, 3> JdRwb = -Jpi * (Sophus::SO3::hat(Paux) * Rcb); //?????????????? // Jacobian of Pc w.r.t NavStatePVR // order in 'update_': dP, dV, dPhi Matrix<double, 2, 9> JNavState = Matrix<double, 2, 9>::Zero(); JNavState.block<2, 3>(0, 0) = JdPwb; JNavState.block<2, 3>(0, 6) = JdRwb; // Jacobian of error w.r.t NavStatePVR _jacobianOplusXi = JNavState; }
不好意思,烂尾了,欢迎交流
参考论文
[1]Christian Forster, Luca Carlone, Frank Dellaert, Davide Scaramuzza,“On-Manifold Preintegration for Real-Time Visual-Inertial Odometry”,in IEEE Transactions on Robotics, 2016.
转载于:https://www.cnblogs.com/112358nizhipeng/p/9057943.html
最后
以上就是落寞手套最近收集整理的关于VIO的Bundle Adjustment推导的全部内容,更多相关VIO的Bundle内容请搜索靠谱客的其他文章。








发表评论 取消回复