功能包
- rf2o_laser_odometry
- robot_localization
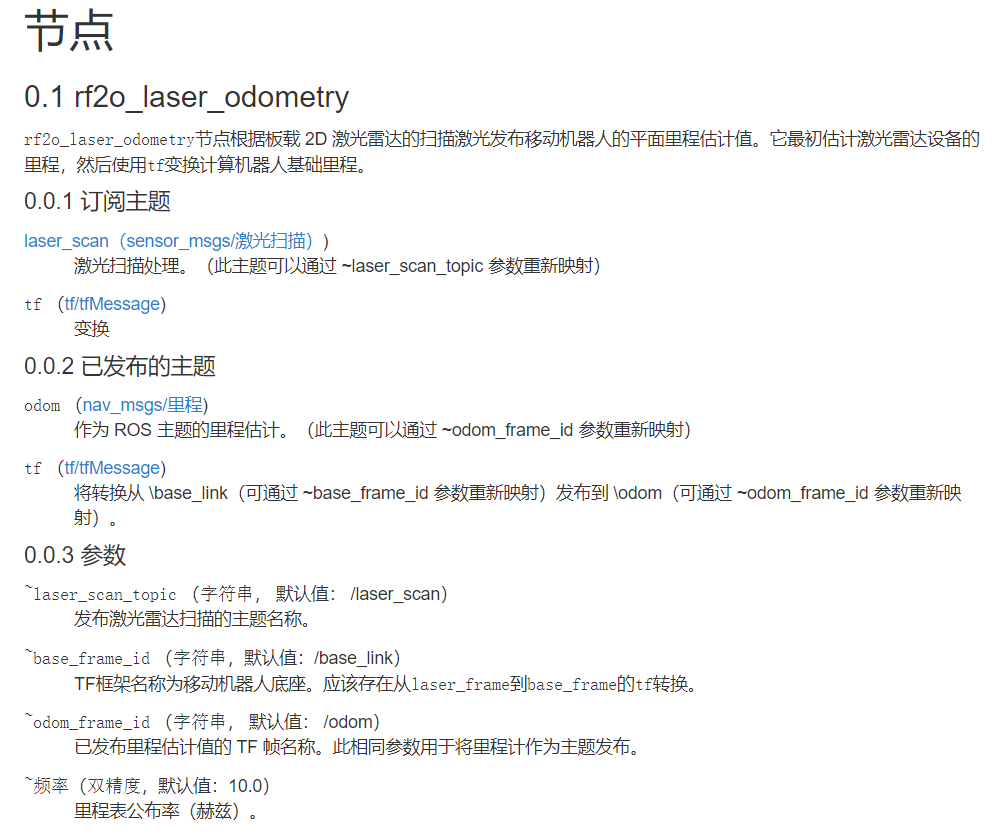
rf2o_laser_odometry
代码地址 :`https://github.com/MAPIRlab/mapir-ros-pkgs`
rf2o_laser_odometry相当于激光里程计
 ----------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------
robot_localization
代码地址:https://github.com/cra-ros-pkg/robot_localization
参考使用:https://www.freesion.com/article/51831322254/#_1
robot_localization是状态估计节点的集合
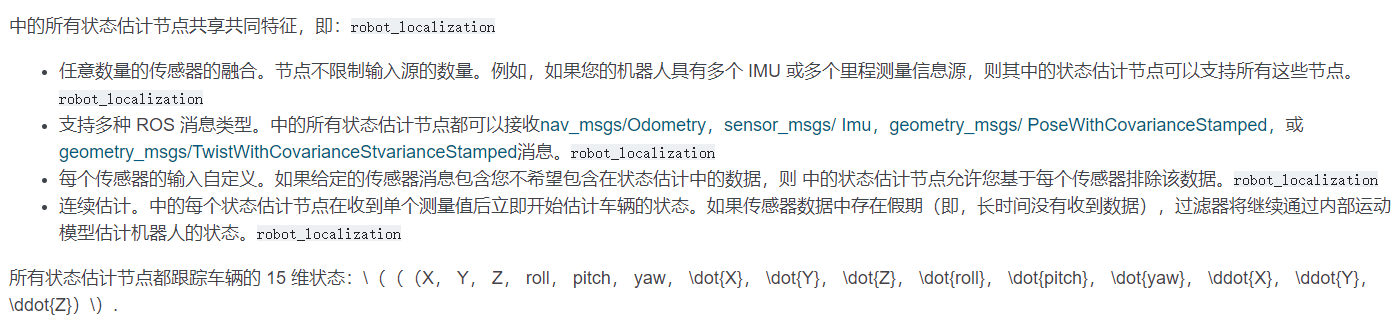
在robot_localization包中包含了两个状态估计节点
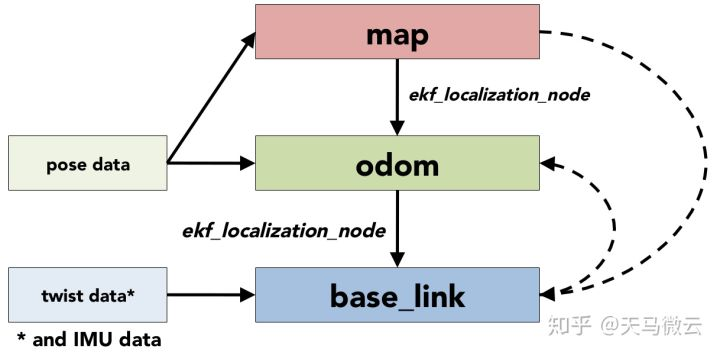
(1)ekf_localization_node 是一个扩展卡尔曼估计器,它使用一个三维测量模型随着时间生成状态,同时利用感知数据校正已经监测过的估计。
ekf_se_map:
frequency: 20
sensor_timeout: 1
two_d_mode: true
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: false
debug: false
use_control: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: map
odom0: /car/navsat_transform_map/odom
odom0_config: [true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom0_queue_size: 1
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
odom0_remove_gravitational_acceleration: true
imu0: /car/imu
imu0_config: [false, false, false,
false, false, true,
false, false, false,
false, false, true,
true, false, false]
imu0_nodelay: false
imu0_differential: false
imu0_relative: false
imu0_queue_size: 1
imu0_remove_gravitational_acceleration: true
process_noise_covariance: [1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3]
initial_estimate_covariance: [1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0]
ekf_se_odom:
frequency: 20
sensor_timeout: 0.1
two_d_mode: true #平面设置为true
transform_time_offset: 0.0 #生成时间戳要用
transform_timeout: 0.0
print_diagnostics: false #如果为True则向/diagnostics话题发布数据,用于调试程序
debug: false
use_control: false #会监听/cmd_vel的geometry_msgs/Twist信息
map_frame: map
odom_frame: car/odom
base_link_frame: car/base_link
world_frame: car/odom
imu0: /car/imu
imu0_config: [false, false, false,
false, false, true,
false, false, false,
false, false, true,
false, false, false]
imu0_nodelay: false
imu0_differential: false
imu0_relative: false
imu0_queue_size: 1
imu0_remove_gravitational_acceleration: true
process_noise_covariance: [1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.3]
initial_estimate_covariance: [1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 1e-9, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1.0]
(2) ukf_localization_node 是一个无迹卡尔曼滤波估计器,它使用一系列sigma点通过非线性变换生成状态,并使用这些估计过的sigma点覆盖状态估计点和协方差,这个估计使用雅克比矩阵并使得估计器更加稳定。然而缺点是比ekf_localization_node耗费更大的计算量。
(3)navsat_transform_node节点
navsat_transform:
frequency: 20
#计算从GPS坐标到机器人世界坐标的转换之前等待的时间(秒)。
delay: 0.0
#此参数指如果尚不可用坐标转换,需要等待的时间,默认为0,不等待
#The value 0 means we just get us the latest available (see tf2 implementation) transform,
transform_timeout: 1.0
#如果您的IMU未考虑磁偏角,请在此处输入您所在位置的值。如果你不知道,
#此参数是必需的。
#看http://www.ngdc.noaa.gov/geomag-web/(请确保将该值转换为弧度)。
# For lat/long 55.944831, -3.186998
magnetic_declination_radians: 0
#IMU的偏航,一旦magentic_declination_radians值被添加到它
#当面向东方时,应该报告0。如果是
#如果没有,请在此处输入偏移量。默认值为0。
yaw_offset: 0
#如果这是真的,则输出里程计信息中的高度设置为0。默认为false。
zero_altitude: true
#如果这是真的,将广播变换world_frame->utm变换以供其他节点使用。
#默认为false。
broadcast_utm_transform: false
#如果这是真的,将发布utm->world_frame变换,而不是world_frame->utm变换。
#请注意,仍然必须启用广播utm转换。默认为false。
broadcast_utm_transform_as_parent_frame: false
#如果为true,navsat_transform_节点也会将机器人的世界坐标系(如地图)
#位置转换回GPS坐标,
#并在/GPS/filtered主题上发布sensor_msgs/NavSatFix消息。
publish_filtered_gps: true
use_odometry_yaw: false
wait_for_datum: true # 设置为false,下方datum不需要定义,每次加载出来的小车起点都在地图的起点处!为true时,datum的经纬读就是地图的起点,小车的位置要和datum的经纬度比较。
#datum: [34.8063928, 113.4973400, 0.0] #定义起点处经纬度
#datum: [31.75669642, 117.18576584, 0.0]
datum: [31.756573,117.18815044,0.0]
/*-----------------------------------------------------------------------------------------------/
在官方文件中 params/dual_ekf_navsat_example.yaml包含了navsat_transform和ekf_se_odom 直接加载即可
<rosparam command="load" file="$(find robot_localization)/params/dual_ekf_navsat_example.yaml" />
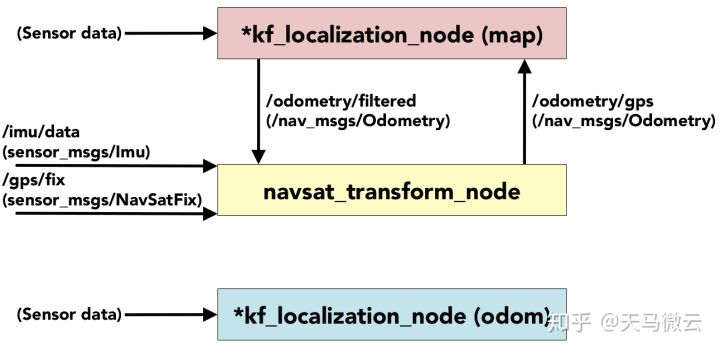
整体架构
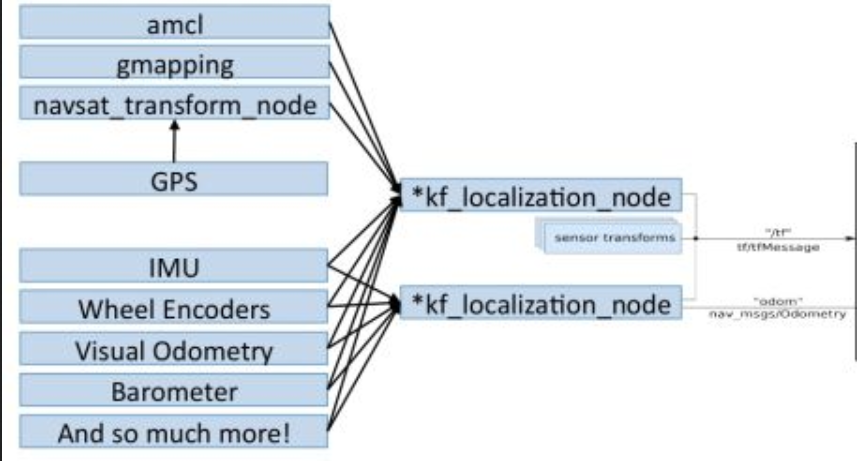 节点的关系
节点的关系
最后
以上就是含糊微笑最近收集整理的关于rf2o_laser_odometry和robot_localizationrf2o_laser_odometryrobot_localization34的全部内容,更多相关rf2o_laser_odometry和robot_localizationrf2o_laser_odometryrobot_localization34内容请搜索靠谱客的其他文章。








发表评论 取消回复