1. 简介
1)摄像机的内参数(Intrinsic)
由摄像机本身决定,只与摄像机本身有关。其参数有:参数矩阵(fx,fy,cx,cy)和畸变系数(三个径向k1,k2,k3;两个切向p1,p2)
2)摄像机的外参数(Extrinsic)
摄像机在世界坐标系中的位姿,由摄像机与世界坐标系的相对位姿关系决定。其参数有:旋转向量R(大小为1x3的矢量或旋转矩阵3x3)和平移向量T(Tx,Ty,Tz)
3)摄像机标定的目的:三维重建
三维重建:摄像机标定的主要目的,也是计算机视觉的最主要的研究方向.所谓三维重建就是指从图象出发恢复出空间点三维坐标的过程。
三维重建的三个关键步骤
- 摄像机标定:单个像机
- 图象对应点的确定:双目
- 二图象间摄像机运动参数的确定:单个像机运动
4)摄像机标定
建立摄像机图像像素位置与场景点位置之间的关系,其途径是根据摄像机模型,由已知特征点的图像坐标求解摄像机的模型参数。
2. 内参数
2.1
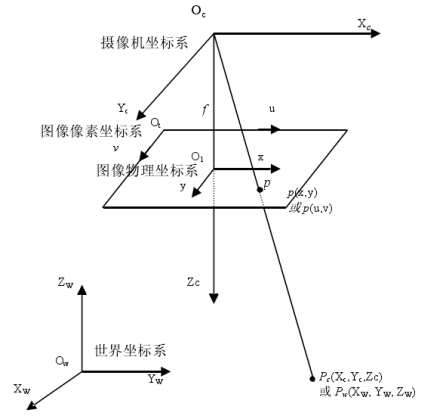
2.2 坐标系及其关系
3. 外参数
最后
以上就是纯情灯泡最近收集整理的关于摄像机的内参数和外参数1. 简介的全部内容,更多相关摄像机的内参数和外参数1.内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。

![摄像头参数详细介绍[转]](https://www.shuijiaxian.com/files_image/reation/bcimg11.png)






发表评论 取消回复