摄像头的主要参数
- 摄像头参数是三种不同的参数。
1)摄像头的内参数是六个分别为:1/dx、1/dy、r、u0、v0、f。
opencv1里的说内参数是4个其为fx、fy、u0、v0。实际其fx=F*Sx,其中的F就是焦距上面的f,Sx是像素/没毫米即上面的dx,其是最后面图里的后两个矩阵进行先相乘,得出的,则把它看成整体,就相当于4个内参。其是把r等于零,实际上也是六个。
dx和dy表示:x方向和y方向的一个像素分别占多少长度单位,即一个像素代表的实际物理值的大小,其是实现图像物理坐标系与像素坐标系转换的关键。u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数。
2)摄像头的外参数是6个:三个轴的旋转参数分别为(ω,δ,θ),然后把每个轴的33旋转矩阵进行组合(即先矩阵之间相乘),得到集合三个轴旋转信息的R,其大小还是33;T的三个轴的平移参数(Tx、Ty、Tz)。R、T组合成成的3*4的矩阵,其是转换到标定纸坐标的关键。
在每个视场无论我们能提取多少个角点,我们只能得到四个有用的角点信息,这四个点可以产生8个方程,6个用于求外参,这样每个视场就还赚两个方程来求内参,则其在多一个视场即可求出4个内参。因为六个外参,这就是为什么要消耗三个点用于求外参。
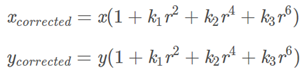
3)畸变参数是:k1,k2,k3径向畸变系数,p1,p2是切向畸变系数。径向畸变发生在摄像头坐标系转图像物理坐标系的过程中。而切向畸变是发生在摄像头制作过程,其是由于感光元平面跟透镜不平行。
A)径向畸变:产生原因是光线在远离透镜中心的地方比靠近中心的地方更加弯曲径向畸变主要包含桶形畸变和枕形畸变两种。
B)切向畸变:产生的原因透镜不完全平行于图像平面,这种现象发生于成像仪被粘贴在摄像机的时候。

总之,16个单目摄像头的参数:
10个内部参数(只与摄像头有关):
5个内部矩阵参数K:f,dx,d,u0,v0
(也可视作4个参数fx,fy,u,v0)
5个畸变参数D:k1,k2,k3,p1,p2
6个外部参数(取决于摄像头在{world}的位置):
3个旋转参数R
3个平移参数T
- 摄像头标定
无论是在图像测量或者机器视觉应用中,摄像机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响摄像机工作产生结果的准确性。因此,做好摄像机标定是做好后续工作的前提,是提高标定精度是科研工作的重点所在。其标定的目的就是为了摄像头内参、外参、畸变参数。
- 摄像头坐标系
摄像头中有四个坐标系,分别为{world},{camera},{image},{pixel}
{world}为世界坐标系,可以任意指定 轴和
轴和 轴
轴
{camera}为摄像头坐标系,原点位于小孔,z轴与光轴重合, 轴和
轴和 轴平行投影面
轴平行投影面
{image}为图像坐标系,原点位于光轴和投影面的交点, 轴和
轴和 轴平行投影面
轴平行投影面
{pixel}为像素坐标系,从小孔向投影面方向看,投影面的左上角为原点 ,uv轴和投影面两边重合
,uv轴和投影面两边重合
最后
以上就是搞怪鸵鸟最近收集整理的关于摄像头的主要参数的全部内容,更多相关摄像头内容请搜索靠谱客的其他文章。





![摄像头参数详细介绍[转]](https://www.shuijiaxian.com/files_image/reation/bcimg11.png)


发表评论 取消回复