3D激光SLAM:LeGO-LOAM论文解读---硬件系统部分
- 硬件系统
- 激光雷达
- 移动车辆
- 计算单元
- 原文
硬件系统
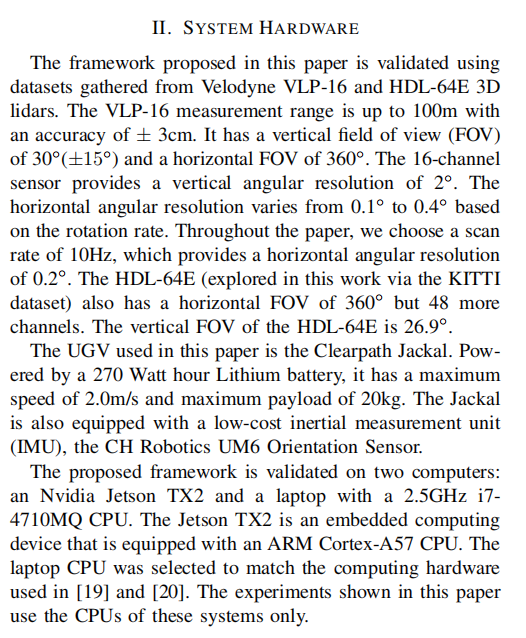
论文的框架由两种激光雷达的数据进行的测
激光雷达
-
1 VLP-16:
测量范围最远100米,精度为±3厘米
30°(±15°)的垂直视场(FOV)和360°的水平FOV
16通道传感器提供2°的垂直角分辨率
水平角分辨根据旋转速率不同,从0.1°到0.4°变化
10Hz的扫描速率,水平角分辨率为0.2° -
2 HDL-64E
60°的水平FOV
48个通道
垂直FOV为26.9°
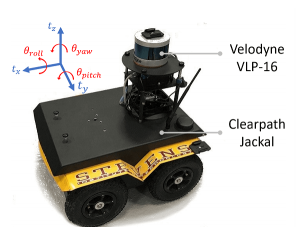
移动车辆
使用的UGV是Clearpath Jackal
锂电池供电
最大速度为2.0米/秒,最大有效载荷为20千克
集成低成本惯性测量单元(IMU),型号为CH Robotics UM6
如下图所示
计算单元
计算单元进行验证的有两个
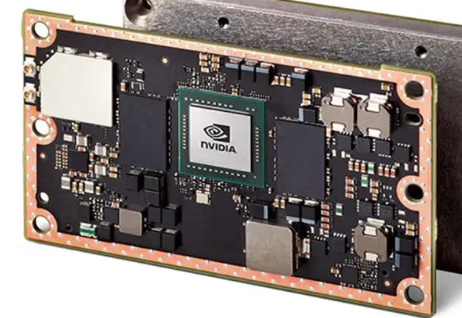
- 1 嵌入式计算设备 Nvidia Jetson TX2
Jetson TX2是一款嵌入式计算设备,配备ARM Cortex-A57 CPU。
- 2 台式计算机 2.5GHz i7-4710MQ
电脑CPU以与LOAM中使用的计算硬件相同
原文
最后
以上就是标致花生最近收集整理的关于3D激光SLAM:LeGO-LOAM论文解读---硬件系统部分硬件系统原文的全部内容,更多相关3D激光SLAM内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复