传感器数据处理1-里程计运动模型
0.内容要点
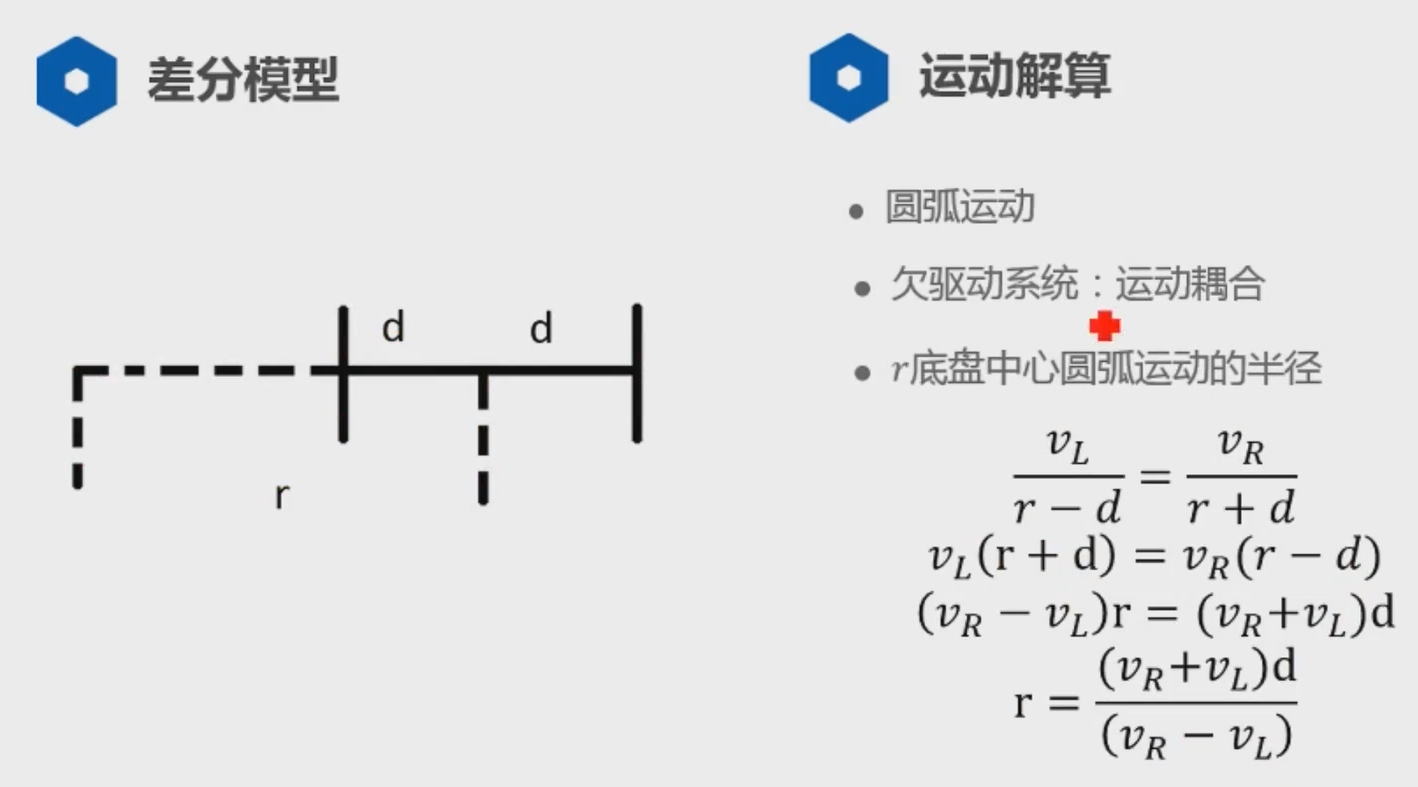
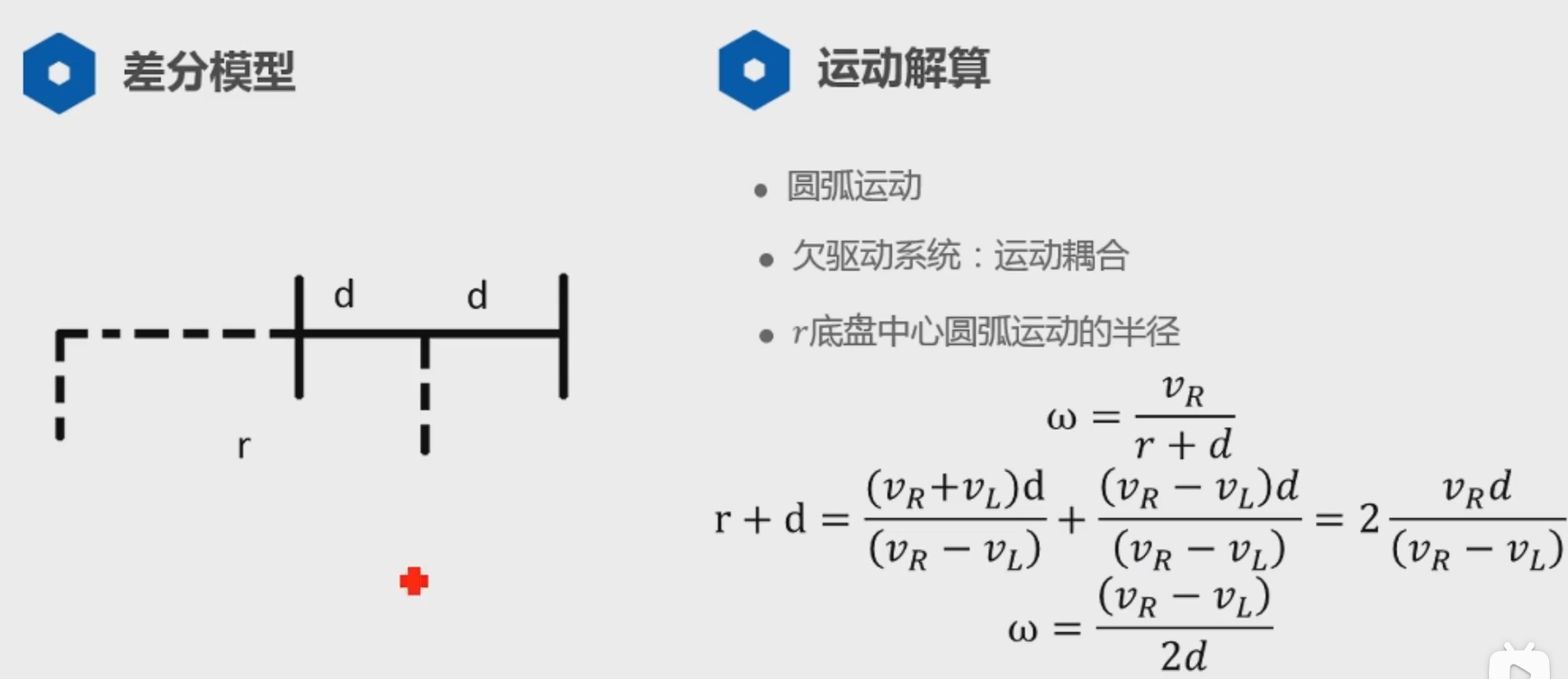
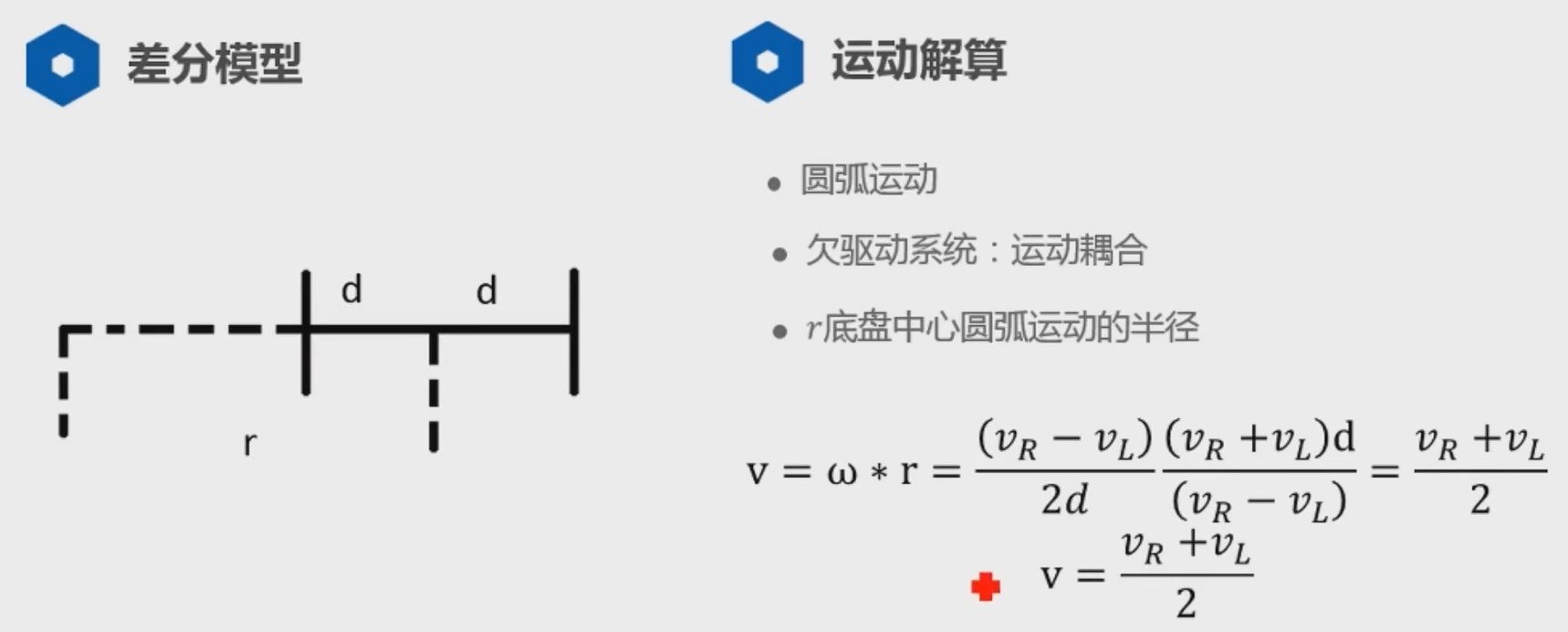
一.两轮差速底盘的运动学模型

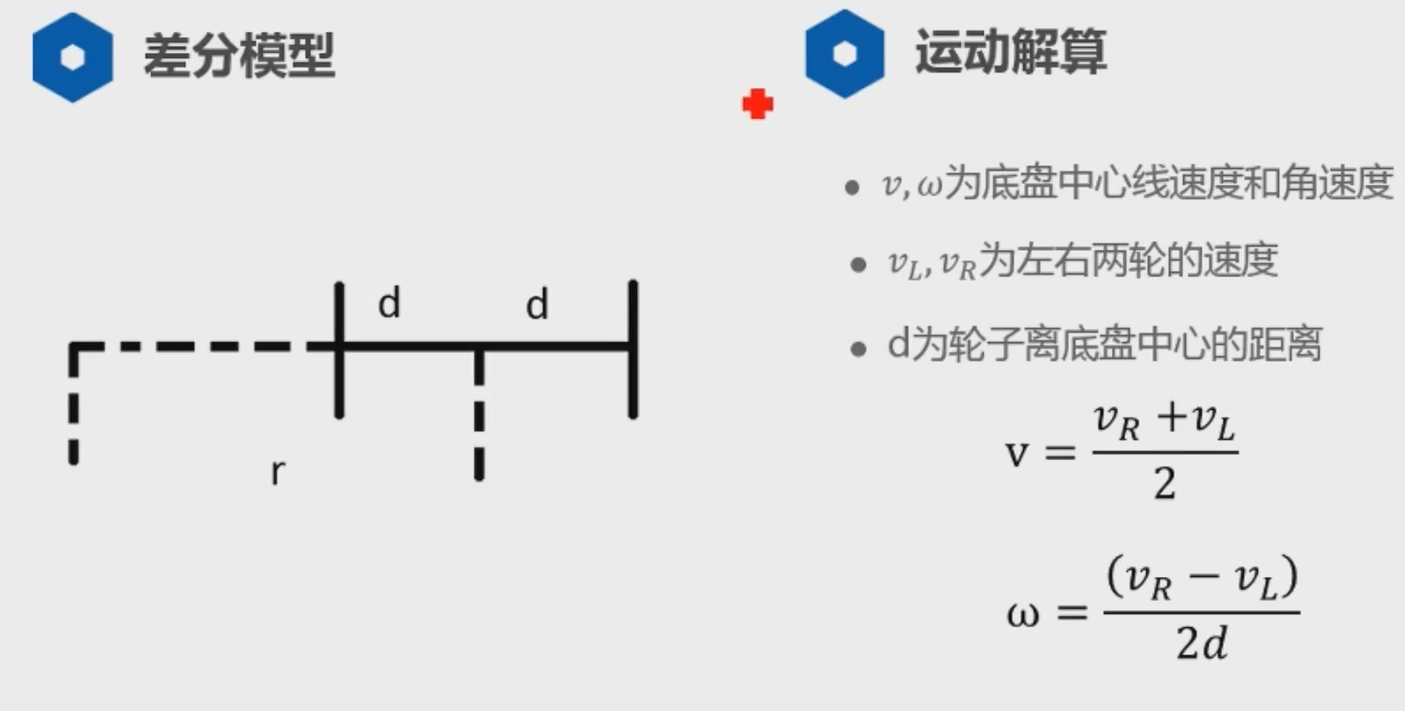
模型推导过程:
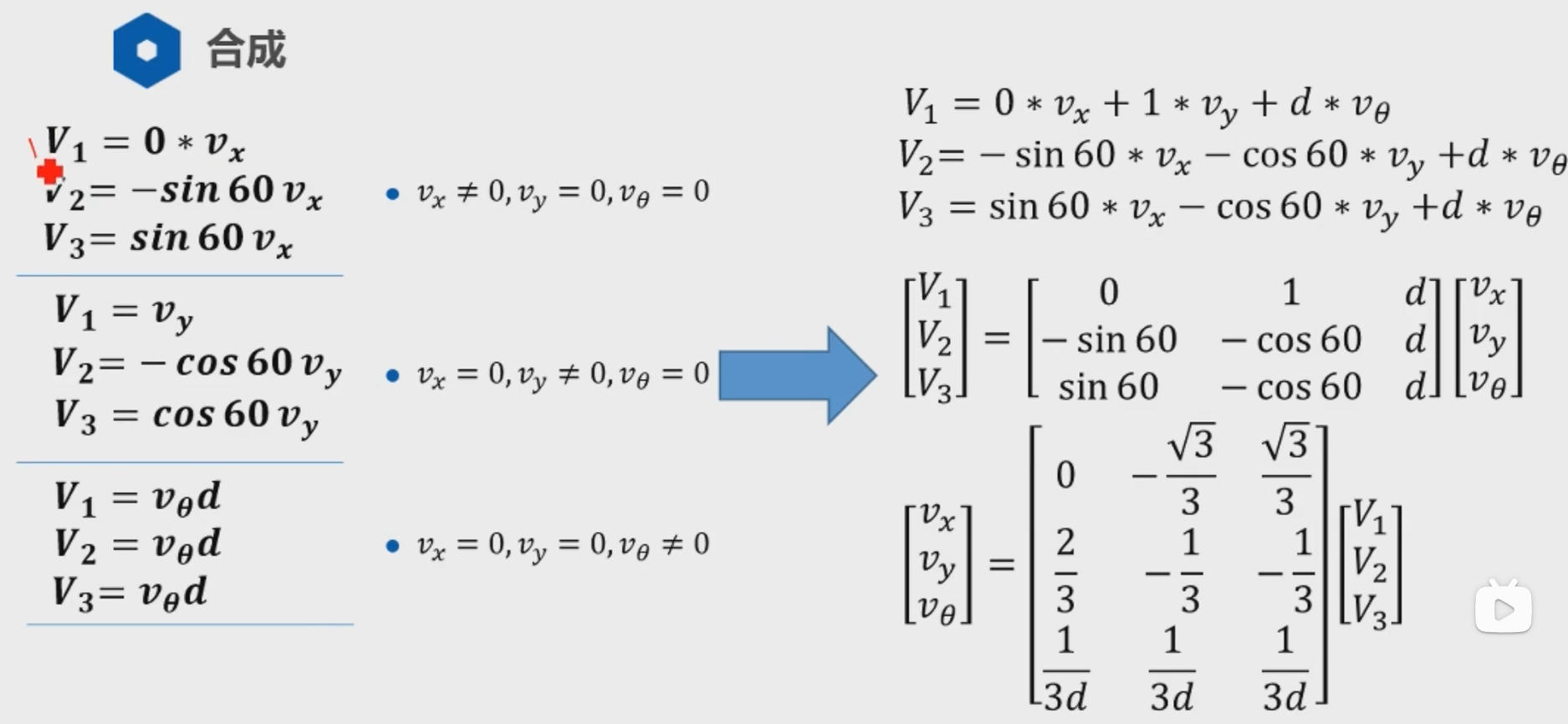
二.三轮全向底盘的运动学模型

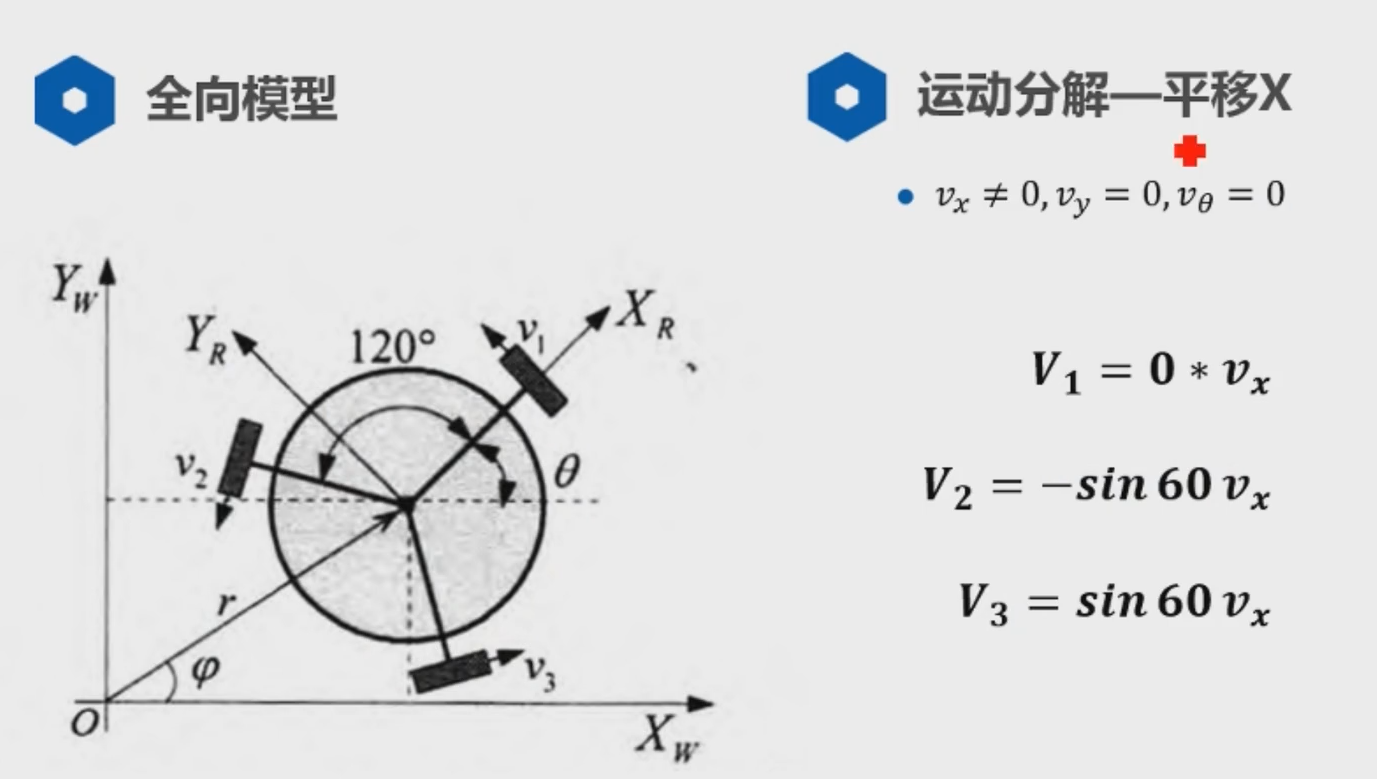
要想让车子想x轴方向移动,即按照图解方式设置三个轮子的速度
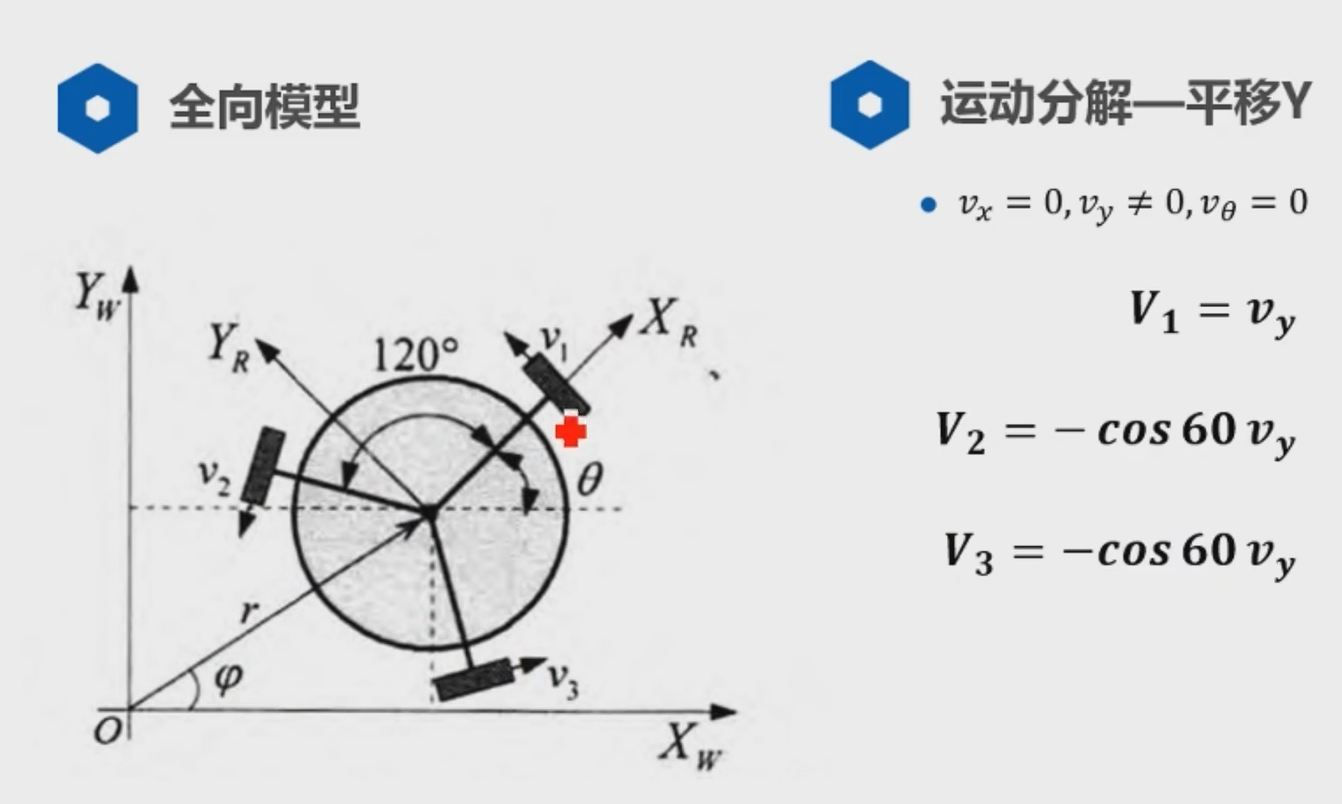
同理,要想让车子想y 轴方向移动,即按照图解方式设置三个轮子的速度
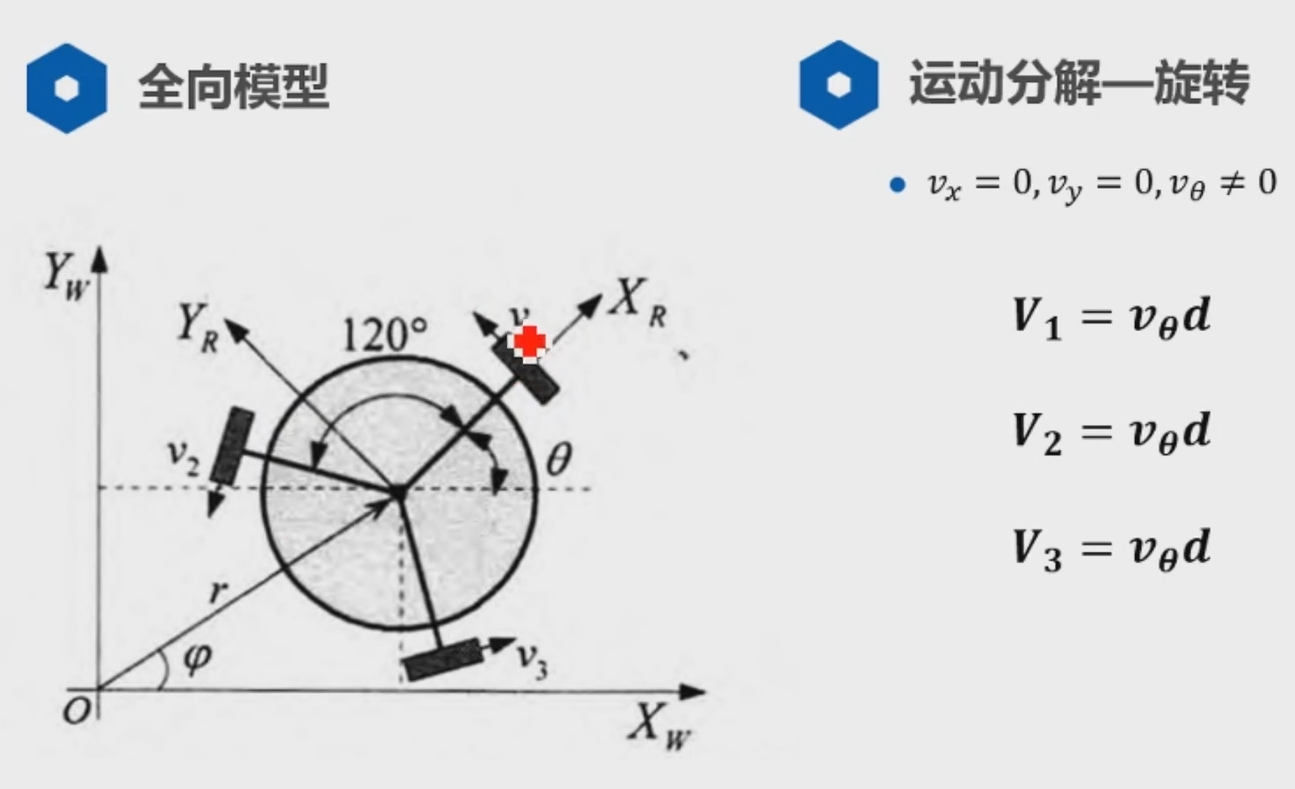
同理,要想让车子做旋转运动,即按照图解方式设置三个轮子的速度
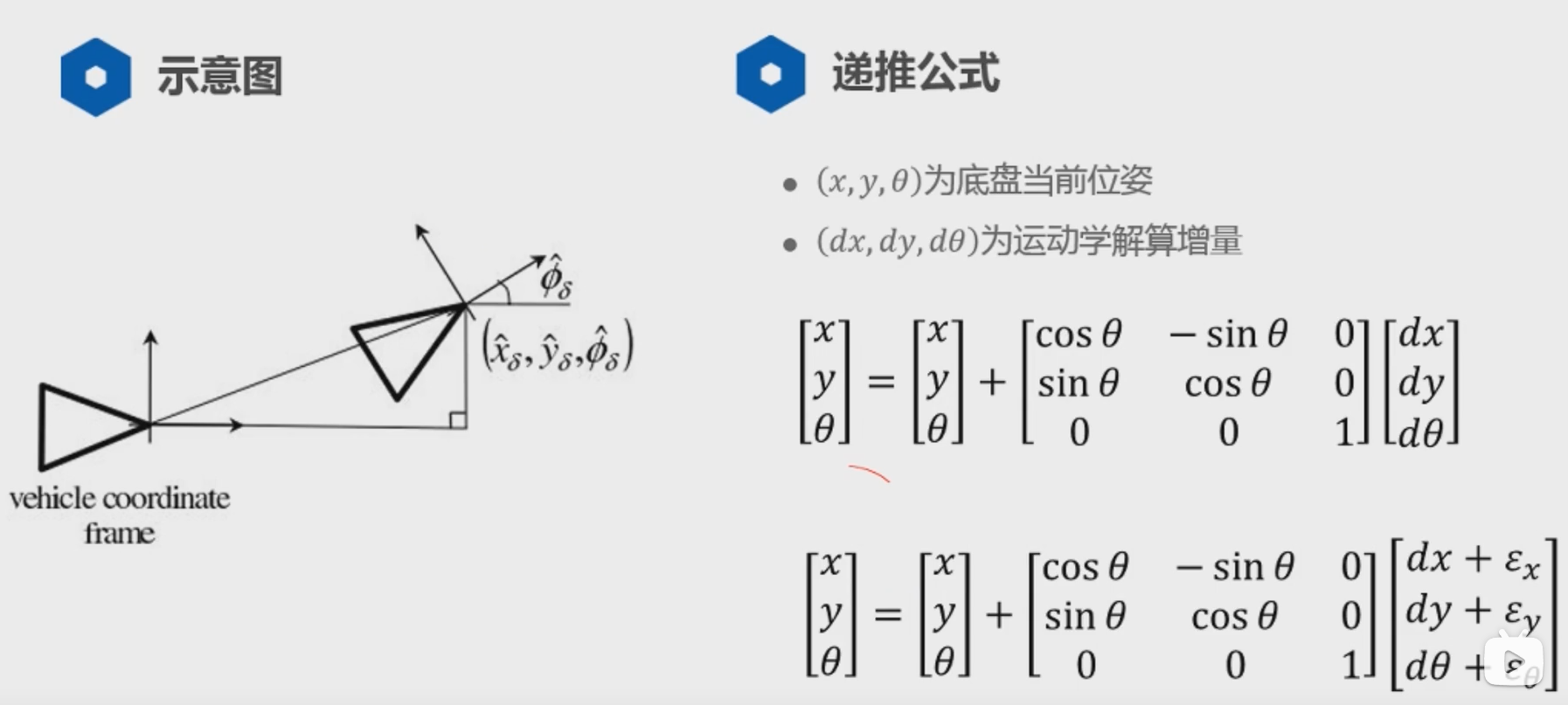
进一步航迹的推算
传感器数据处理2-里程计标定
0.内容要点
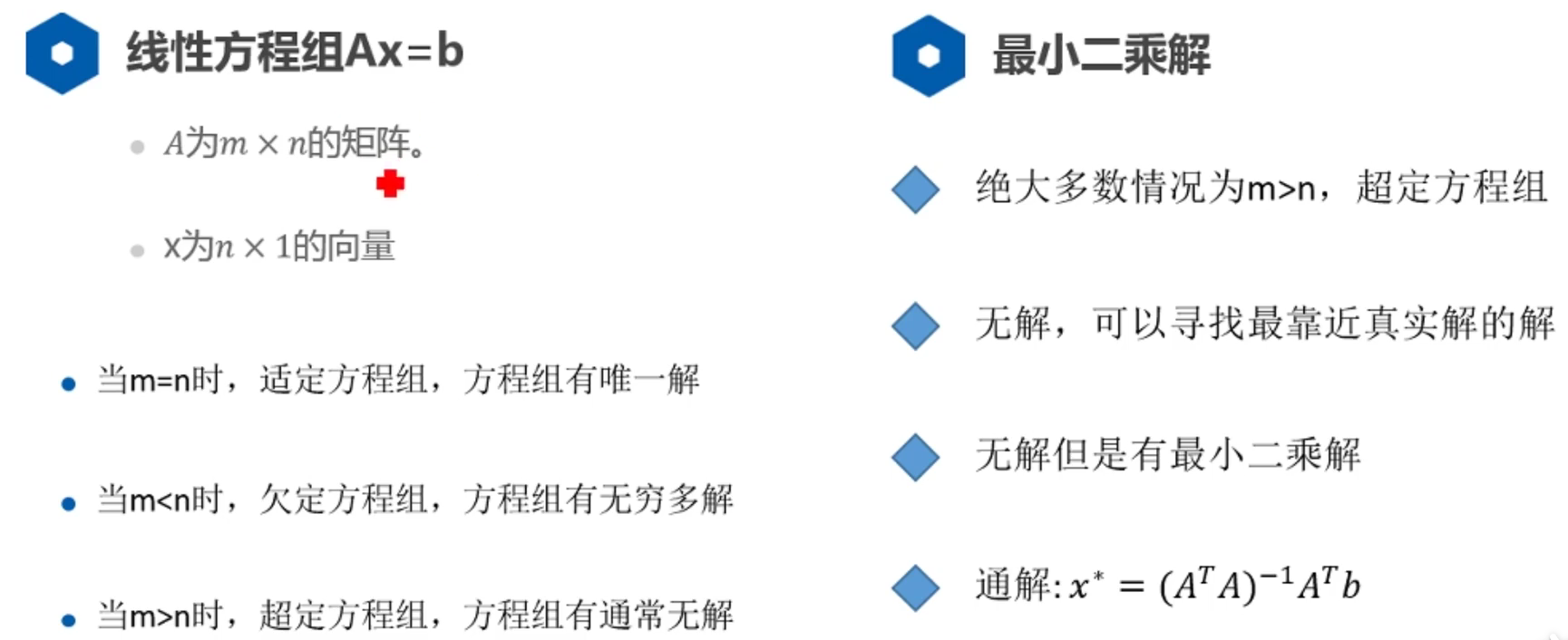
1 线性最小二乘
条件数降低,求解更稳定
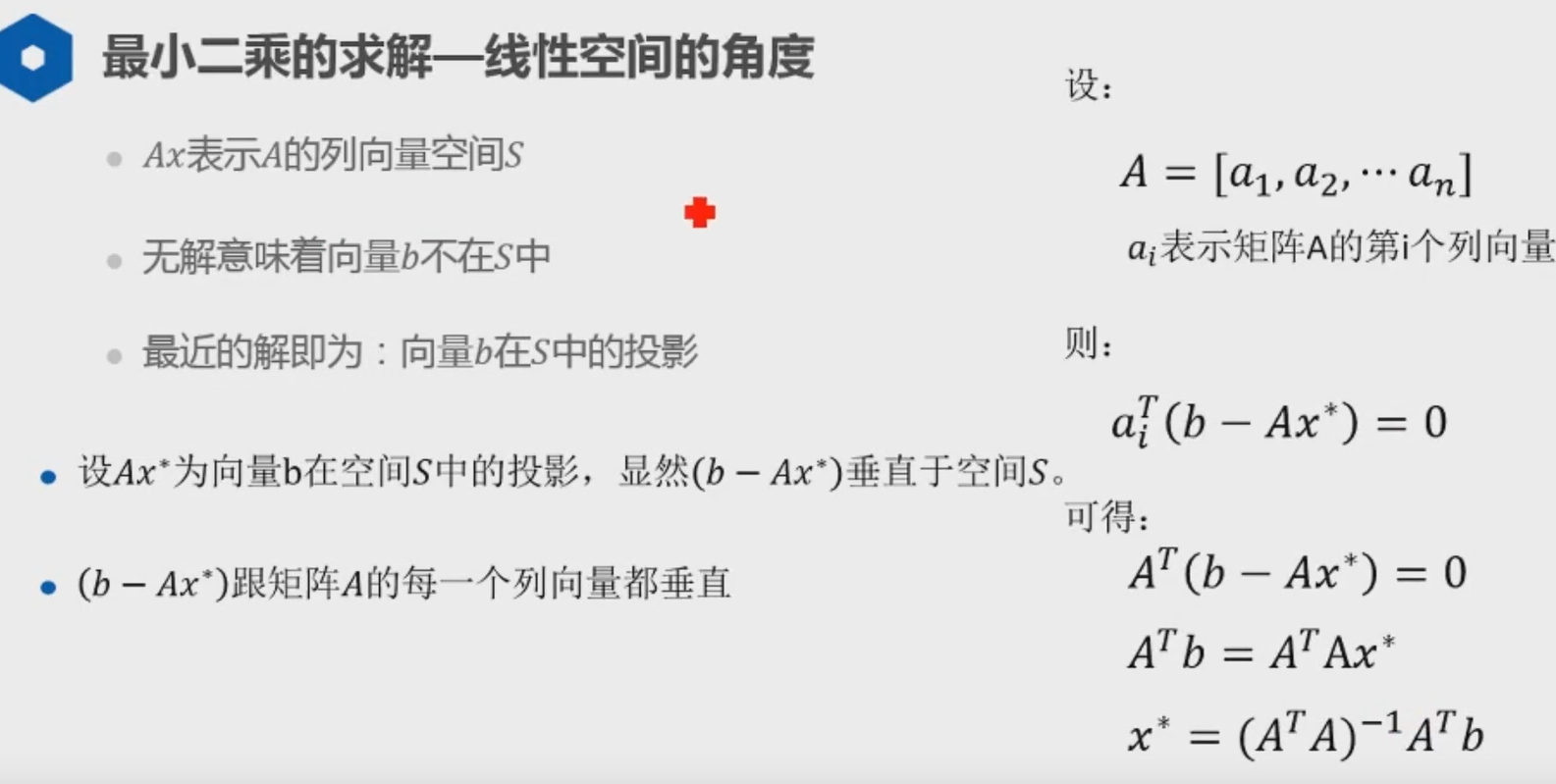
2 最小二乘的求解
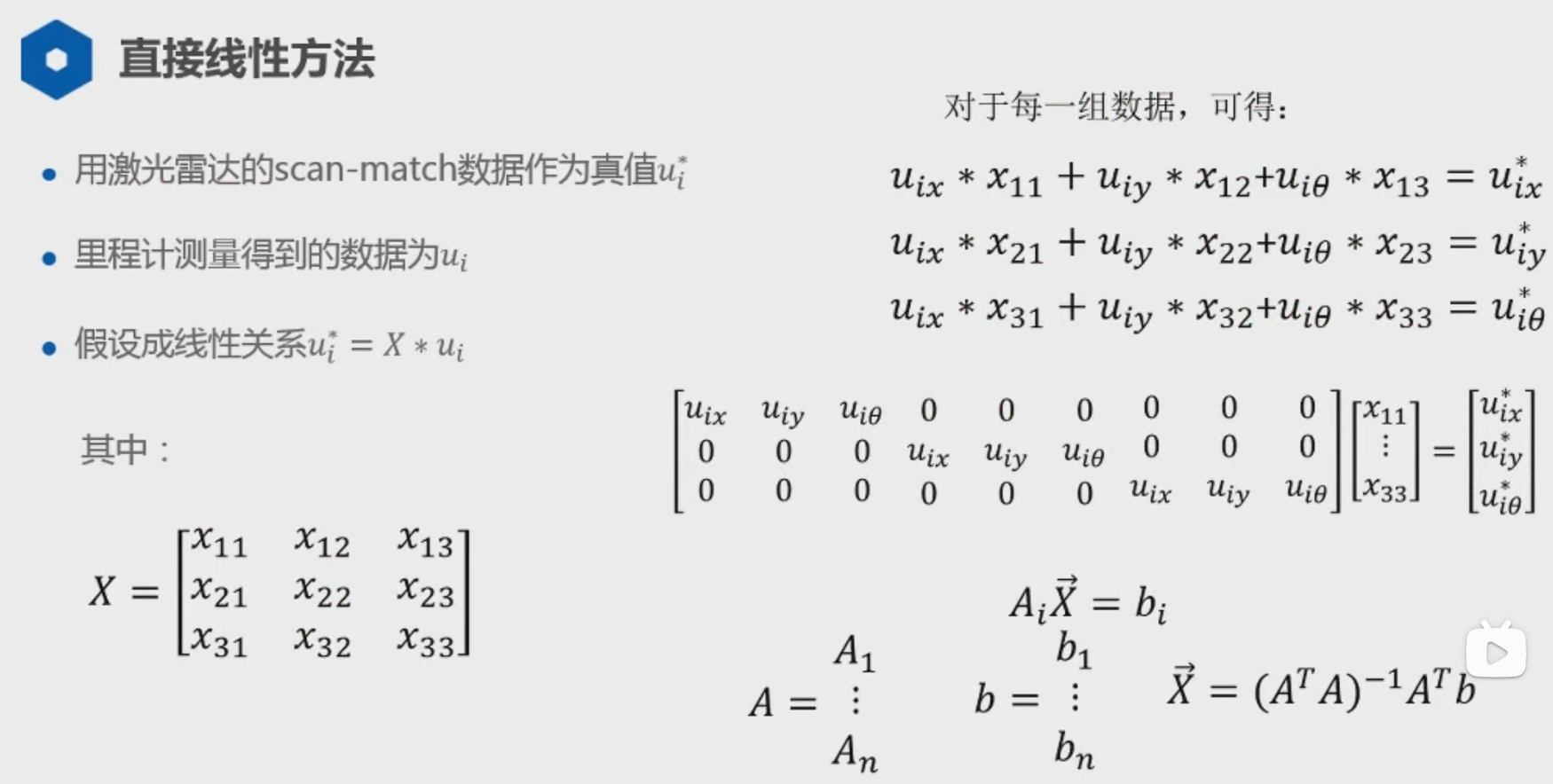
二 最小二乘在里程计中标定的作用

最后
以上就是忧伤水壶最近收集整理的关于激光SLAM入门笔记(二)——传感器数据处理之里程计的全部内容,更多相关激光SLAM入门笔记(二)——传感器数据处理之里程计内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复