Win10下NAO机器人的C++平台搭建
计算机科学与技术一班 吴同 11619370106
系统环境 win10
所需软件 1.vs2010(其他版本尚不清楚) 下载地址链接:https://pan.baidu.com/s/1bqeORD1密码:503s
2.python2.7(必须是2.7版本python)并安装pip模块 (用于安装qibuild)
3.CMake(2.8.12.2以上版本均可) 下载地址https://cmake.org/files/
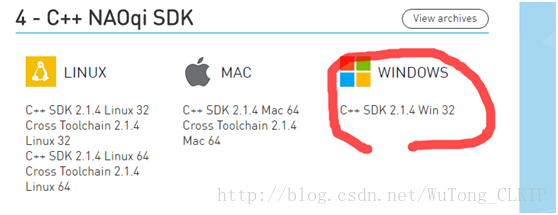
4.nao的C++SDK 下载地址: https://community.ald.softbankrobotics.com(注册软银社区账号并登录即可下载)
具体操作步骤:
1.安装visual studio 2010的vc模块,不要安装VB,C#模块,验证vc没有问题后开始第二步安装CMake
2.安装CMake 下载安装包后(注意是exe文件)双击安装,出现安装选项后,选择
Add CMake to the system PATH for allusers
如果提示path too long 错误,那么手动添加,找到你的CMake 应用程序的目录,复制路径添加到系统的环境变量中,在下面的变量中找到path 双击添加我的路径是C:Program Files (x86)CMake 2.8bin
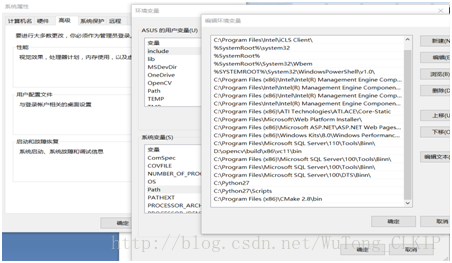
3.安装python2.7,在windows的系统变量中添加python的安装目录路径,如果装在C盘则直接在path中添加C:Python27和C:Python27Scripts,并点击确认保存。
4.解压nao机器人的C++ SDK 工具包,解压缩至路径,例如我的在
C:NaoAppnaoqi-sdk-2.1.4.13-win32-vs2010
然后运行naoqi.bat
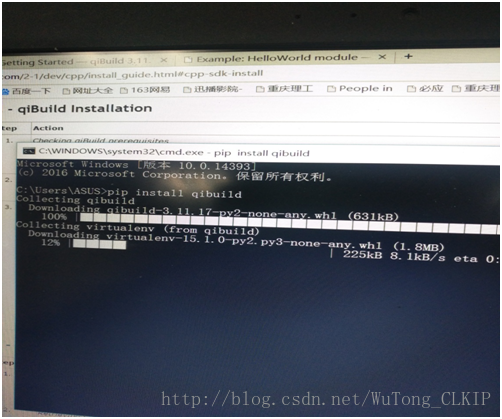
5.借助pip 安装qibuild
1)确保你已经安装了python2.7和CMake,然后win+r 输入cmd打开命令提示符框,输入
pip install qibuild,如图正在安装qibuild。
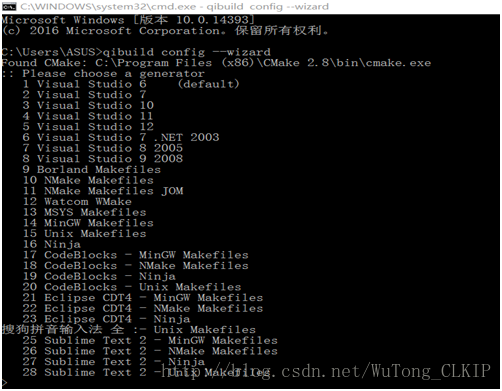
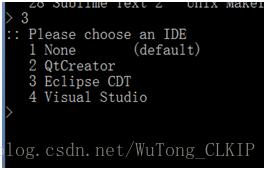
2)安装完成后,输入 qibuildconfig –wizard
会出现如下图所示20多个选项
先选择第三项 visual studio10 然后回车,之后选择第四项visual Studio并回车
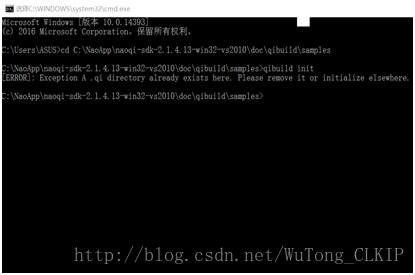
6.检验C++SDK 是否配置成功
在命令提示符窗口中打开你的sdk 文件目录,输入cd+路径
输入 qibuild init ,正常情况下提示已经有qi worktree 在该路径下,则已经配好
7.然后输入
qitoolchain create mytoolchainC:NaoAppnaoqi-sdk-2.1.4.13-win32-vs2010toolchain.xml
来创建toolchain(mytoolchain 是你想赋给 toolchain 的名字)
再输入qibuild add-config mytoolchain -t mytoolchain –default 来创建关于这个toolchain的 configuration并确保 这个configration是 worktree 的默认值
最后依次输入
Cd C:NaoAppnaoqi-sdk-2.1.4.13-win32-vs2010docqibuildsampleshelloworldworld
qibuild configure
qibuild make
得到如下图所示结果,则编译成功
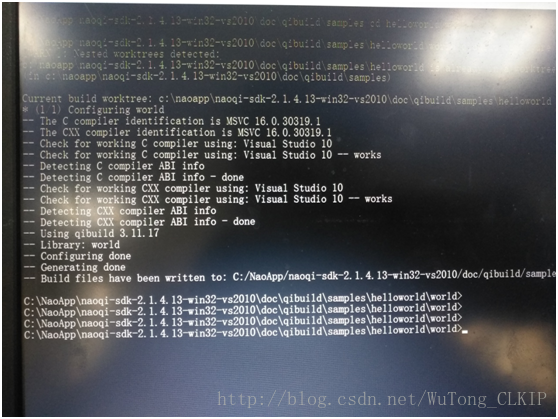
至此,平台搭建完成,可以用CMake 来运行写的C++程序,并在vs2010中编译运行
可以从官方网站上下载zip文件并运行,具体运行例子请参考以下步骤
以下内容转载自网站http://www.docin.com/p-1561762417.html
运行例子
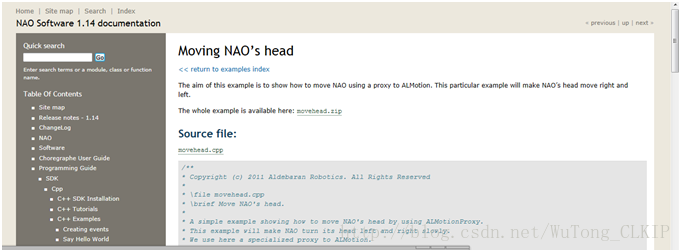
官方网站http://doc.aldebaran.com/2-1/dev/cpp/examples/motion/movehead/movehead.html
3.在帮助文档中C++examples中的“Others:”中选择一个例子(MoveNao's head);
下载zip文件(下图中点击“movehead.zip")
并解压到一个文件夹(如D:CMAKETESTmovehead)
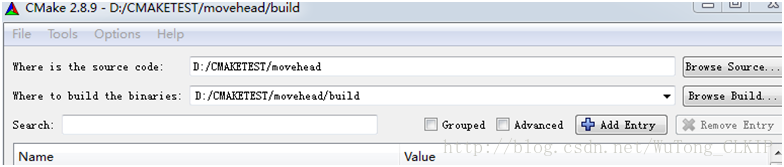
4.在D盘建立文件夹CMAKETEST并运行CMake 2.8.9软件,在Where isthe source code ,where to build the binaries中可按照填写如下图(build这个文件夹自己添上)
4,点击Configure,出现下图情况时,按如下选择:
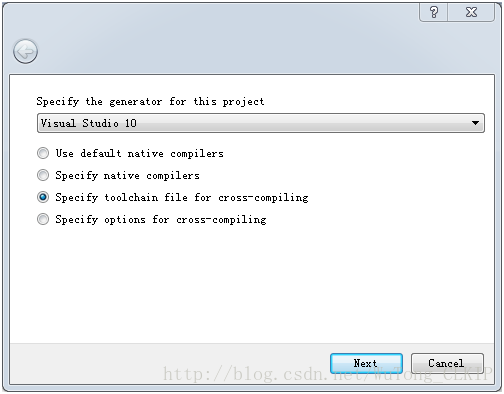
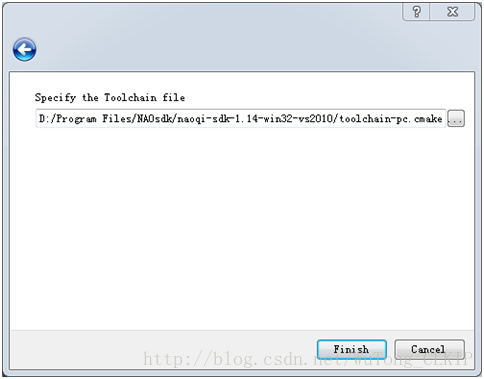
5,填入.......NAOsdknaoqi-sdk-1.14-win32-vs2010toolchain-pc.cmake,然后“Finsh”:具体如下图:(注意输入你自己sdk版本的路径)
6,构建后出现框中红色,再次点击Configure,然后点击Generate
7.CMake构建完后,打开刚才的build文件夹,运行movehead.sln文件
8.右击窗口左侧的movehead项目,设为启动项目,然后调试启动(F5)、
9.运行Webots for NAO,在naoqi-sdk-1.14-win32-vs2010文件夹的bin文件夹中可找到
生成的exe文件。见下图:
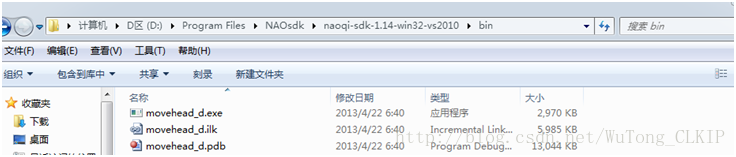
10.运行cmd,输入 cd D:ProgramFilesNAOsdknaoqi-sdk-1.14-win32-vs2010bin 。路径没改变时输入d: 。
11.输入movehead_d.exe 和机器人IP地址 并运行就OK了

最后
以上就是踏实网络最近收集整理的关于Win10下Nao机器人的C++开发平台搭建环境配置流程,这学期综合实践的内容,做了一个星期,总算做出来了,写个总结的全部内容,更多相关Win10下Nao机器人内容请搜索靠谱客的其他文章。








发表评论 取消回复