官方链接:
https://dev.px4.io/en/simulation/hitl.html
硬件在环仿真(HITL)结构图

A HITL configuration is selected (via QGroundControl) that doesn't start any real sensors.
HITL仿真需要在地面站中选取专用机型:
硬件在环仿真过程中并没用到实际的传感器,gazebo提供传感器数据,这一点可以从仿真过程GPS信号为3D fix可以看出。
Gazebo are connected to the flight controller via USB,Gazebo通过USB连接到飞控板。
The simulator is connected to QGroundControl via UDP and bridges its MAVLink messages to PX4,Gazebo通过UDP协议连接到地面站。
需要注意的地方:
地面站的Safety选项中HITL enable配置为enable.
general选项中飞控板连接地面站的方式只选择udp.
机型要选对。
COM_RC_IN_MODE : "Joystick/No RC Checks"
NAV_DLL_ACT :"Disabled"
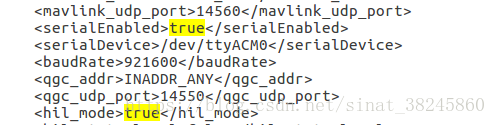
仿真配置文件.sdf需要更改serialEnabled和hil_mode为true.如果你用的usb转串口,相应修改下图中/dev/ttyACM0,USB线连接一般是这个,usb转串口一般是ttyUSB0。
HITL启动顺序:
首先插上飞控板!
cd src/Firmware
source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/posix_sitl_default
#添加gazebo插件、模型路径信息。
gazebo Tools/sitl_gazebo/worlds/iris.world
#启动仿真
最后启动地面站!!!最后启动地面站!!!最后启动地面站!!!
最后
以上就是玩命战斗机最近收集整理的关于PX4的硬件仿真(HITL)环境配置过程的全部内容,更多相关PX4内容请搜索靠谱客的其他文章。








发表评论 取消回复