Matlab代码生成之SIL/PIL测试
- 一、SIL与PIL测试流程
- 二、Top Model的SIL/PIL仿真
- 三、基于模型的SIL(PIL)测试
- 四、基于SIL(PIL)控制模块测试
一、SIL与PIL测试流程
1.SIL(Software in the Loop),使用SIL可以在PC端进行测试生成的代码。 PIL(Processor in the Loop),使用PIL可以在实际目标硬件或指令集模拟器 上运行源代码进行测试。
测试标准:将PIL(SIL)结果与正常模型测试结果进行对比,可以得到生代码的执行效果。
2.需要配置与PC端的直接连接参数
二、Top Model的SIL/PIL仿真
特点:
1.可以直接使用独立的代码接口进行测试
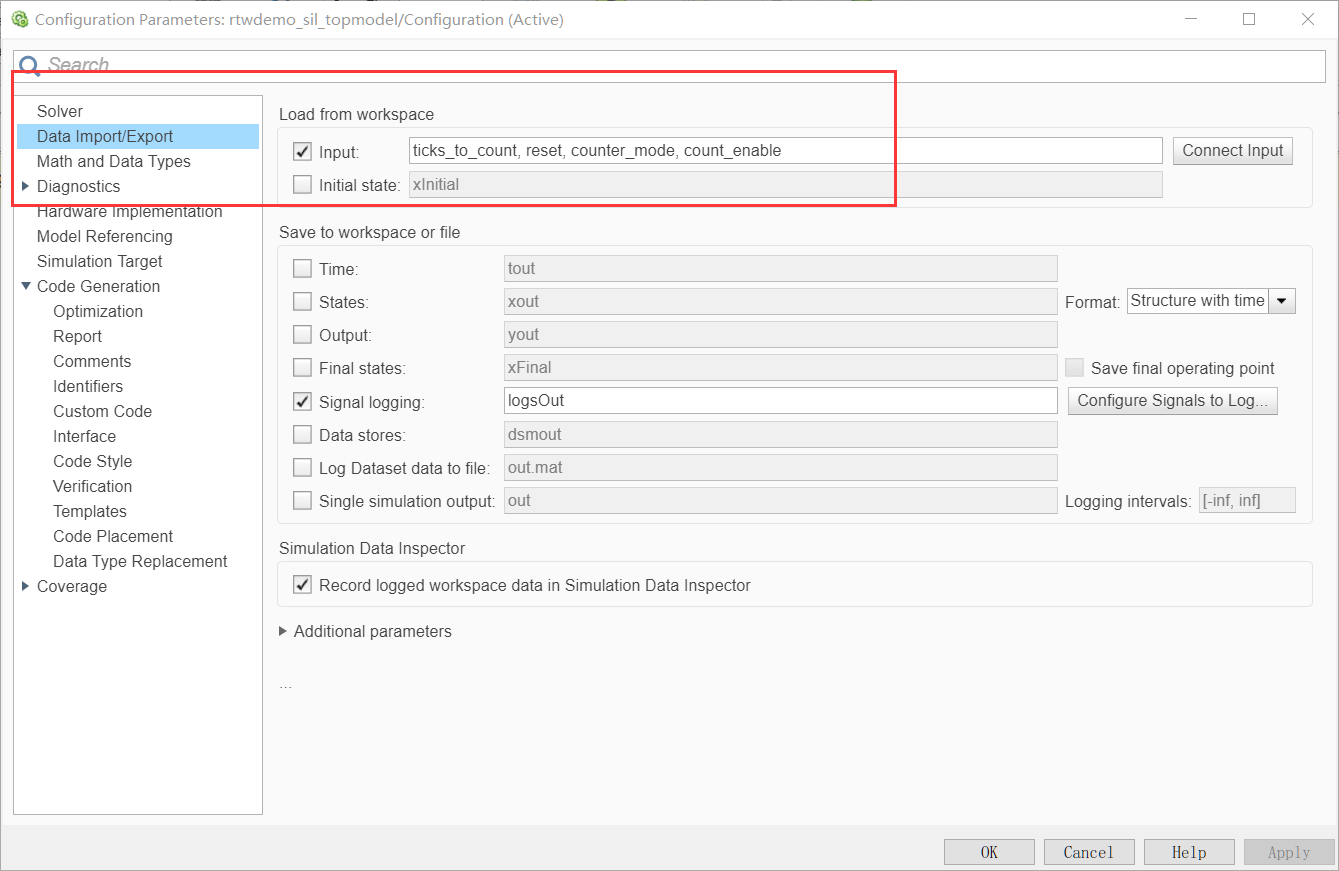
2.可以配置模型从Workspace中加载测试向量和激励输入
3.便捷地在Top model、Normal、SIL、PIL之间进行切换
官方链接:官方链接1
在matlab command window中输入以下命令:
model='rtwdemo_sil_topmodel';
close_system(model,0) //关闭不保存
open_system(model) //打开model
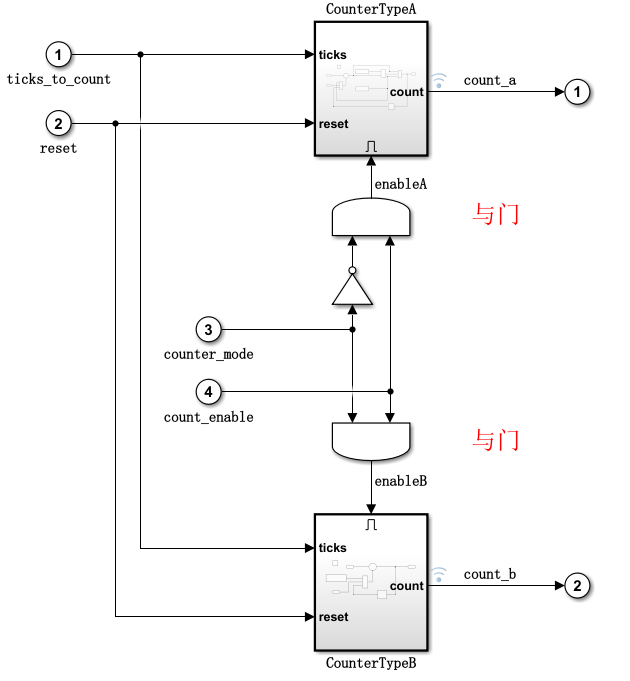
之后在Simulink中打开如下模型:
在matlab command window中输入以下命令:
set_param(gcs, 'RecordCoverage','off'); /*关闭模型覆盖率记录*/
coverageSettings = get_param(model, 'CodeCoverageSettings');
coverageSettings.CoverageTool='None'; /*关闭代码覆盖率记录*/
set_param(model, 'CodeCoverageSettings',coverageSettings);
set_param(model, 'CodeExecutionProfiling','off'); /*关闭执行时间分析*/
[ticks_to_count, reset, counter_mode, count_enable] = ...
rtwdemo_sil_topmodel_data(T); /*设置输入参数*/
set_param(model, 'LoadExternalInput','on');
set_param(model, 'ExternalInput','ticks_to_count, reset, counter_mode, count_enable');
set_param(model, 'SignalLogging', 'on');
set_param(model, 'SignalLoggingName', 'logsOut'); /*设置相关参数*/
set_param(model,'SimulationMode','normal')
[~, ~, yout_normal] = sim(model,10); /*运行normal 模型(结果存储在yout_normal)*/
set_param(model,'SimulationMode','Software-in-the-Loop (SIL)')
[~, ~, yout_sil] = sim(model,10); /*运行SIL模型(结果存储在yout_sil)*/
fig1 = figure;
subplot(3,1,1), plot(yout_normal), title('Counter Output for Normal Simulation')
subplot(3,1,2), plot(yout_sil), title('Counter Output for SIL Simulation')
subplot(3,1,3), plot(yout_normal-yout_sil), ...
title('Difference Between Normal and SIL'); /*绘制图像,观看两者差异*/
模型中有关的设置:
整个模型的执行就是,从外部输入控制参量然后进行执行,然后对比SIL与normal模型下的运行结果进行分析。
三、基于模型的SIL(PIL)测试
model='rtwdemo_sil_modelblock';
open_system(model); /*打开模型*/
coverageSettings = get_param(model, 'CodeCoverageSettings');
coverageSettings.CoverageTool='None';
set_param(model, 'CodeCoverageSettings',coverageSettings);
open_system('rtwdemo_sil_modelblock')
set_param('rtwdemo_sil_modelblock', 'CodeExecutionProfiling','off');
open_system('rtwdemo_sil_counter')
set_param('rtwdemo_sil_counter', 'CodeExecutionProfiling','off');
currentFolder=pwd;
save_system('rtwdemo_sil_counter', fullfile(currentFolder,'rtwdemo_sil_counter.slx'))
/*关闭代码覆盖率、执行时间分析*/
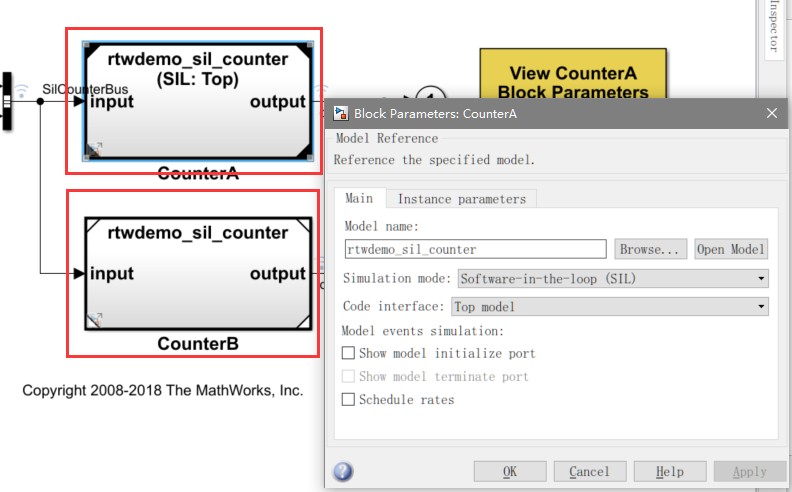
set_param([model '/CounterA'], 'CodeInterface', 'Top model'); /*设置模型的运行方式*/
out = sim(model,20); /*开始运行*/
yout = find(out,'logsOut');
yout_sil = yout.get('counterA').Values.Data;
yout_normal = yout.get('counterB').Values.Data;
fig1 = figure;
subplot(3,1,1), plot(yout_normal), title('Counter Output for Normal Simulation')
subplot(3,1,2), ...
plot(yout_sil), title('Counter Output for Model Block SIL (Top-Model) Simulation')
subplot(3,1,3), plot(yout_normal-yout_sil), ...
title('Difference Between Normal and SIL'); /*绘制图表进行分析*/
这种模式下是normal和SIL(PIL)各自封装成一个测试模块同时执行(如图中的CounterA与CounterB),对比执行后的结果。
四、基于SIL(PIL)控制模块测试
model='rtwdemo_sil_block';
close_system(model,0)
open_system(model) /*打开模型*/
out = sim(model,10);
yout_normal = find(out,'yout');
clear out /*启动模型*/ 这里是normal模型的仿真
set_param(model,'CreateSILPILBlock','SIL');
close_system('untitled',0);
rtwbuild([model '/Controller'])
controllerBlock = [model '/Controller'];
blockPosition = get_param(controllerBlock,'Position');
delete_block(controllerBlock);
add_block('untitled/Controller',[controllerBlock '(SIL)'],...
'Position', blockPosition);
close_system('untitled',0);
clear controllerBlock blockPosition
之后出现一个新的model构建框:
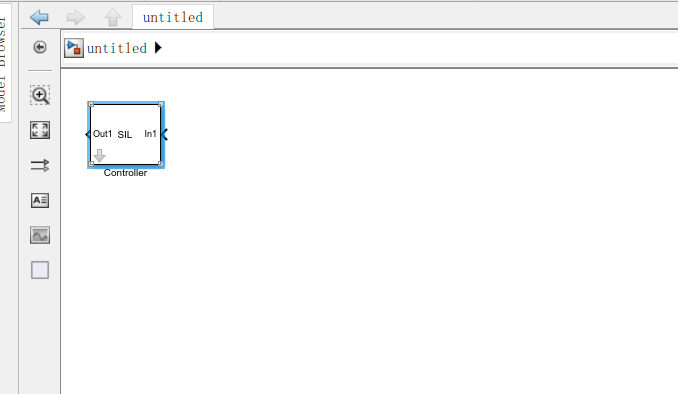
controllerBlock = [model '/Controller'];
blockPosition = get_param(controllerBlock,'Position');
delete_block(controllerBlock); //删除原来模型中的模块
add_block('untitled/Controller',[controllerBlock '(SIL)'],... //将生成的Model替代原来模型中的模块
'Position', blockPosition);
close_system('untitled',0);
clear controllerBlock blockPosition
out = sim(model,10); //启动仿真
machine_precision = eps(single(yout_normal));
tolerance = 4 * machine_precision; //设置仿真容许误差
yout_sil = find(out,'yout');
tout = find(out,'tout');
fig1 = figure;
subplot(3,1,1), plot(yout_normal), title('Controller Output for Normal Simulation')
subplot(3,1,2), plot(yout_sil), title('Controller Output for SIL Simulation')
subplot(3,1,3), plot(tout,abs(yout_normal-yout_sil),'g-', tout,tolerance,'r-'), ...
title('Normal and SIL Difference and Error Tolerance'); //绘制图像
close_system(model,0);
if ishandle(fig1), close(fig1), end
clear fig1
simResults={'out','yout_sil','yout_normal','tout','machine_precision'};
save([model '_results'],simResults{:});
clear(simResults{:},'simResults') //关闭图像
五、总结
PIL测试方面,可以验证测试生成代码。C2000的测试与以上相仿,具体说明链接如下:官方链接
最后
以上就是天真外套最近收集整理的关于Matlab代码生成之SIL/PIL测试的全部内容,更多相关Matlab代码生成之SIL/PIL测试内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复