准备知识:
在mpp/sample/makefile.param
/*gcc 的 -D选项作用要注意*/
CFLAGS += -Wall -g $(INC_FLAGS)
-D$(HIARCH)
-DHICHIP=$(HICHIP)
-DSENSOR_TYPE=$(SENSOR_TYPE)
-D$(HIDBG)
-D$(HI_FPGA) -lpthread -lm -ldl -D$(ISP_VERSION)
编译器通过 -D 选项将SENSOR_TYPE 作为宏传入源代码
ifeq ($(SENSOR_TYPE), SMARTSENS_SC2235_CMOS_1080P_20FPS)
SENSOR_LIBS += $(REL_LIB)/libsns_sc2235.a
endif
通过上面的指令确定连编哪一个lib!!!!!!
每个lib里面都是一样的函数 就是实现了
File Name : hi_sns_ctrl.h 中定义好的
void sensor_init();
void sensor_exit();
void sensor_prog(int *rom);
int sensor_write_register(int addr, int data);
int sensor_read_register(int addr);
int sensor_write_register_bit(int addr, int data, int mask);
c
int sensor_unregister_callback(void);
int sensor_set_inifile_path(const HI_CHAR *pcPath);
然后通过int sensor_register_callback(void)函数注册给驱动程序,通过晚绑定机制被驱动程序调用
海思的sensor驱动大部分工作在应用层,即应用层驱动(非ko形式存在),这样一来在对sensor改动时,就不需要重新编译内核了。
缺点是,不稳定,效率会比较低。纯应用层驱动是没办法操作硬件的,所以需要调用底层i2c驱动。
1、驱动源码路径
Hi3518E_SDK_V1.0.3.0packagemppmppcomponentispsensor目录下。sample_common.h 头文件 中SAMPLE_VI_MODE_E中定义了mpp支持的sensor类型,根据你的sensor添加(最好的办法就是找一个存在的替换 比如新的sensor sc2235p 直接替换sc2235 即可 这个enum就不用改了)2、sensor驱动调用
sensor驱动编译完之后会生成xxx.a和xxx.so两个库,一个是静态链接用的,一个是动态链接用的。
这两个文件会被放到Hi3518E_SDK_V1.0.3.0packagemppmpplib目录下。3、sensor驱动文件命名规则
xxxx_cmos.c中定义回调和上层函数。
xxxx_sensor_ctl.c中定义底层硬件相关的寄存器值配置函数。4、sensor驱动在哪被调用
从之前的sample_venc开始看,在第三部分step 3: start vi dev & chn to capture
SAMPLE_COMM_VI_StartVi()
SAMPLE_COMM_VI_StartIspAndVi()
SAMPLE_COMM_ISP_Init()
sensor_register_callback()
sensor_register_callback这个函数就在sensor驱动里面,这里会调用到kernel内的i2c驱动对sensor进行硬件操作。
5、sensor_register_callback
这个函数就是对整个sensor初始化,内部封装了操作sensor所需要的函数,(ISP、AE(自动曝光)、AWB(白平衡))
其中的cmos_init_sensor_exp_function函数将sensor操作时所需要的函数一一挂接起来,例如初始化调用的sensor_init。6、sensor_init
初始化sensor,初始化的方式就是调用i2c函数接口来实现操作sensor内部寄存器。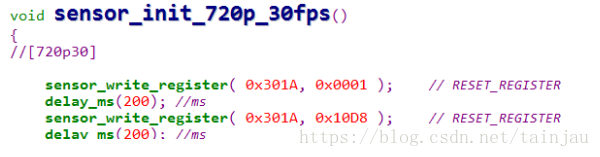
7、黑电平
黑电平(Black Level Correction)也就是黑色的最低点,以8bit数据来说,指在经过一定校准的显示装置上,没有一行光亮输出的视频信号电平。定义图像数据为0时对应的信号电平。
sensor中的黑电平是可以调节的,就相当于标准值,就像零摄氏度这种概念。8、sensor驱动编译实战
(1)修改驱动源码
以AR0130为例,修改mppcomponentispsensorar0130目录下的应用驱动源码。
如果是调整黑电平,就修改ar0130目录下的ar0130_coms.c文件里面的cmos_get_isp_black_level函数中的au16BlackLevel数组。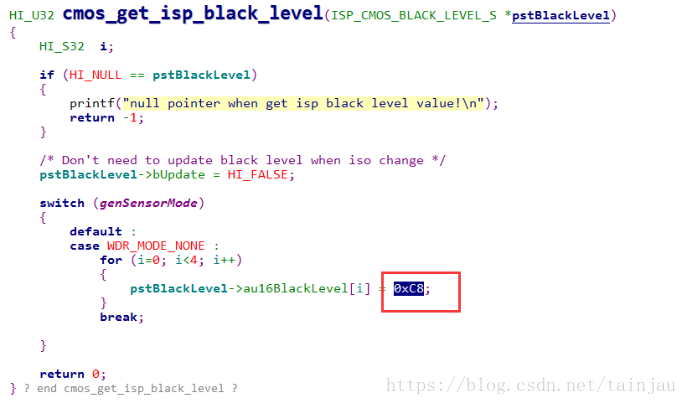
(2)清除,并重新编译
首次编译需要在mppcomponentisp目录下将整个isp进行编译。
执行make clean指令。
再执行make
(3)确认mpp中lib目录下的libsnsxxx.a/so已经被更新。
(4)重新编译sample并运行查看效果。9、AR0130sensor寄存器
参考AR0130_RR_C.pdf文档的Register Behavior寄存器章节,了解各寄存器用途。最后
以上就是含蓄小鸭子最近收集整理的关于海思处理器sensor驱动调用过程与源码解析与实战1、驱动源码路径2、sensor驱动调用3、sensor驱动文件命名规则4、sensor驱动在哪被调用5、sensor_register_callback6、sensor_init7、黑电平8、sensor驱动编译实战9、AR0130sensor寄存器的全部内容,更多相关海思处理器sensor驱动调用过程与源码解析与实战1、驱动源码路径2、sensor驱动调用3、sensor驱动文件命名规则4、sensor驱动在哪被调用5、sensor_register_callback6、sensor_init7、黑电平8、sensor驱动编译实战9、AR0130sensor寄存器内容请搜索靠谱客的其他文章。








发表评论 取消回复