本文主要介绍NVIDIA Jetson系列的摄像头模组硬件设计,重点介绍TX2和Xavier系列的摄像头模组接口硬件设计。
Jetson系列的摄像头接口都是通过MIPI CSI2对外引出的,官方开发板都预留了相关接口,下面分别进行介绍。
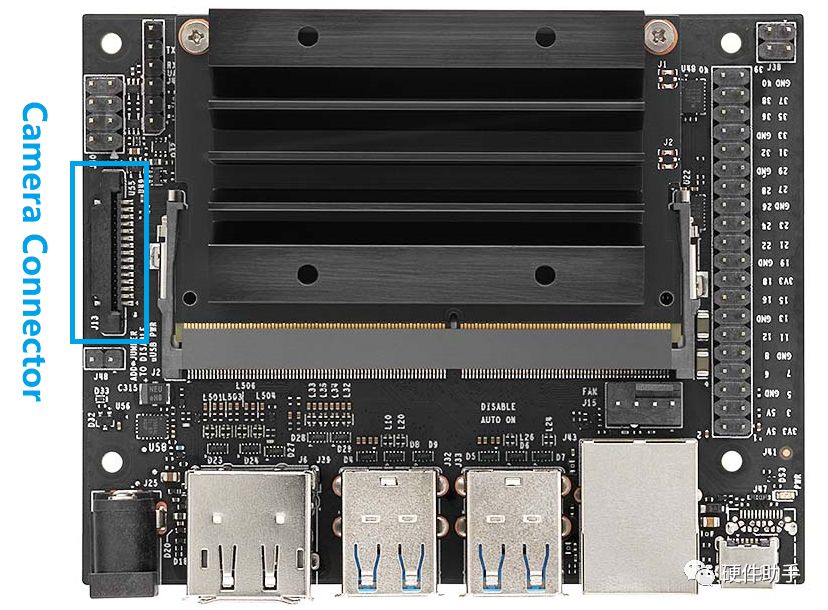
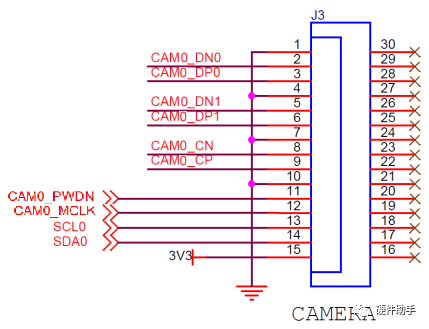
1、Jetson Nano
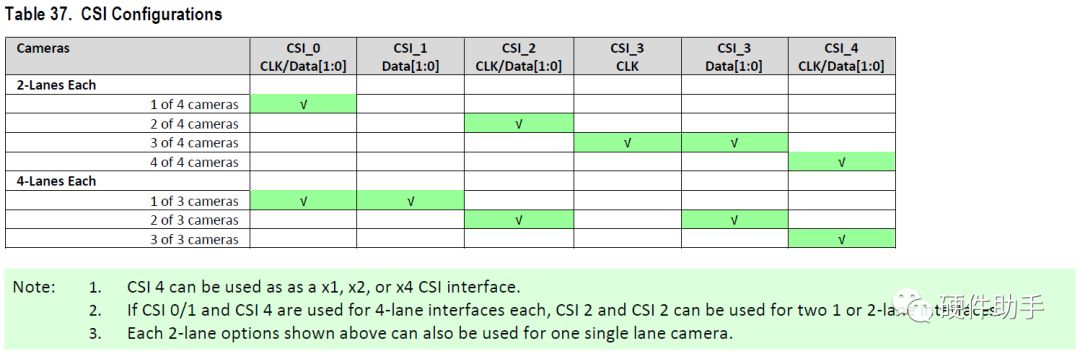
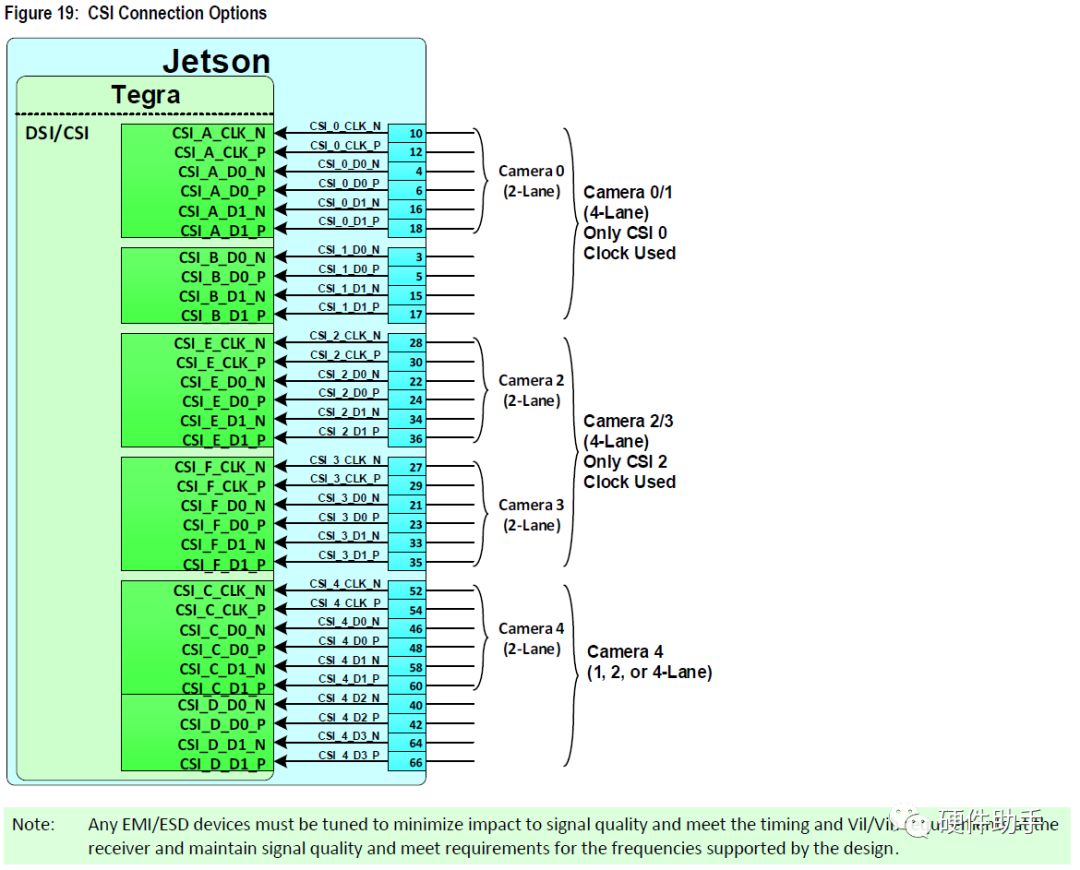
Nano的CSI接口,物理层采用D-PHY,协议层对外引出了12 lane CSI接口,每一个data lane的带宽可达1.5Gbps。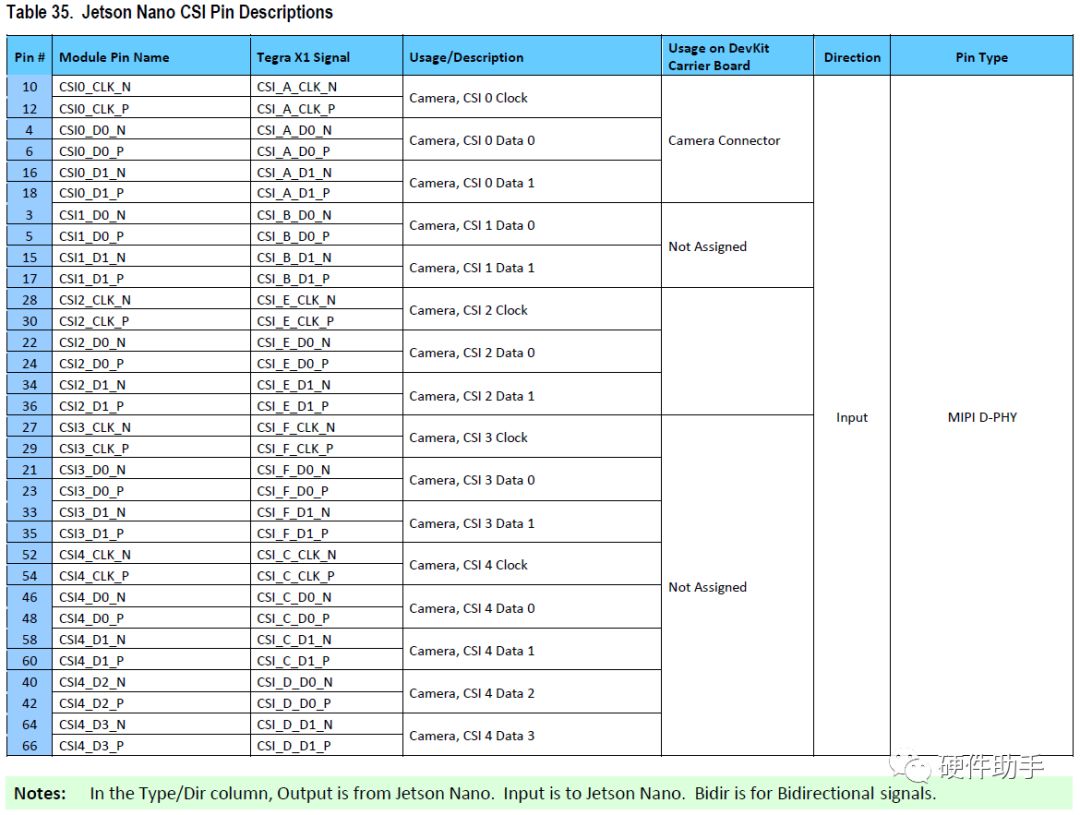
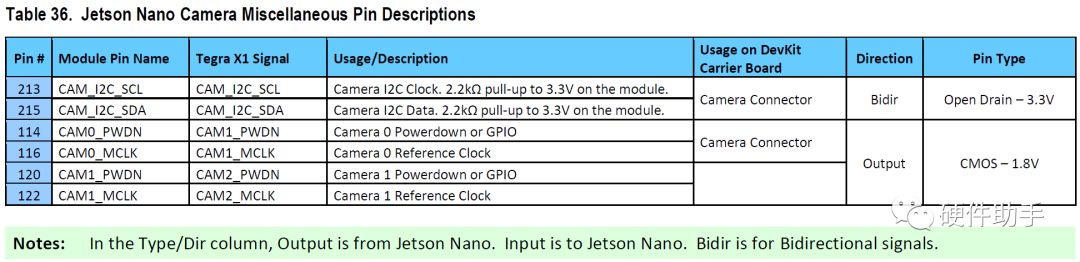
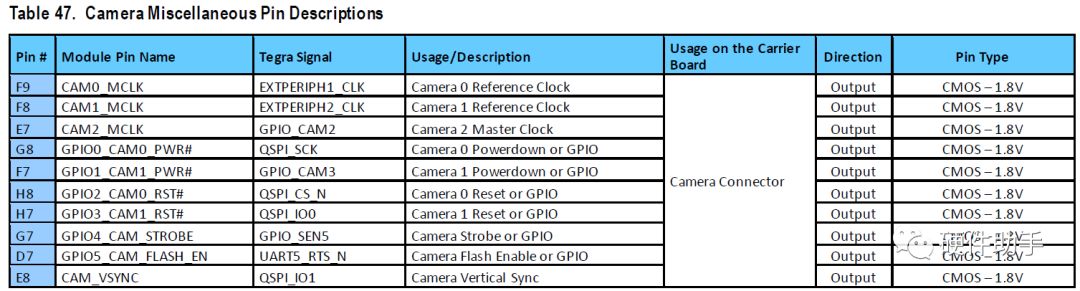
辅助控制信号包含一路I2C,两路模组上下电控制、参考时钟输出。
2、TX2
TX2的CSI接口,物理层也采用D-PHY,协议层对外引出了12 lanes CSI接口,每一个data lane的带宽可达2.5Gbps。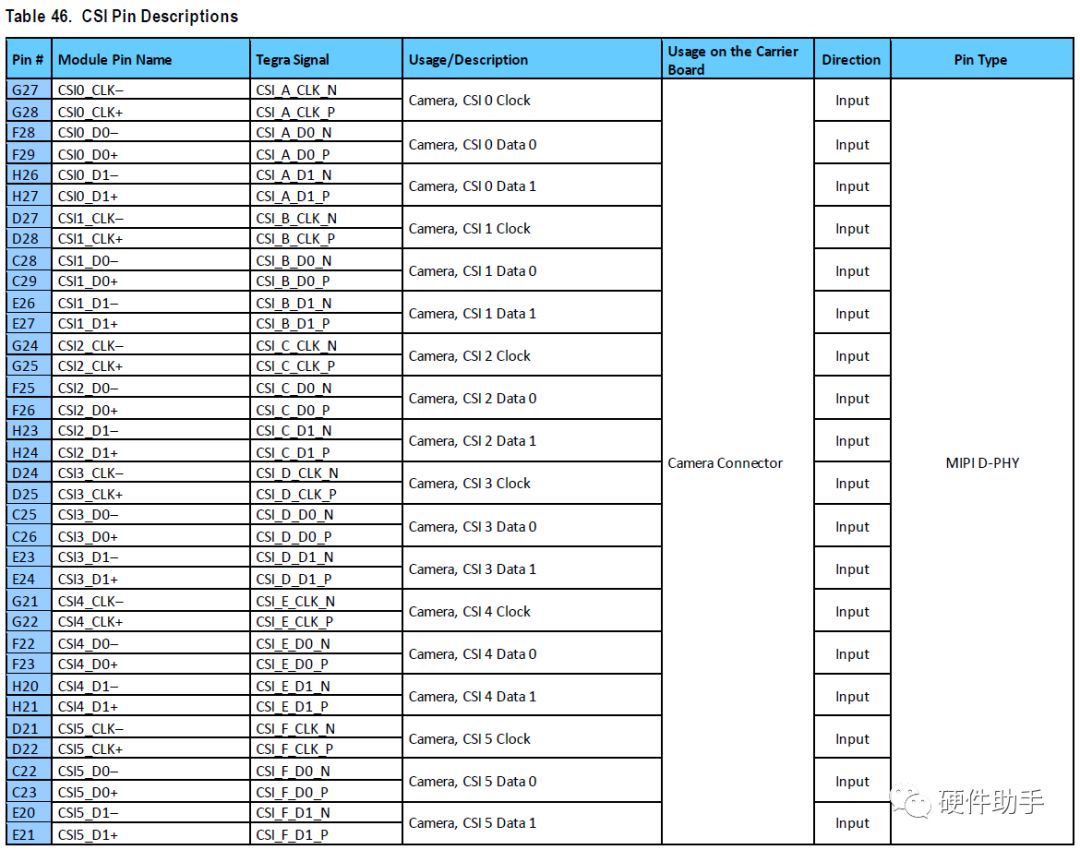
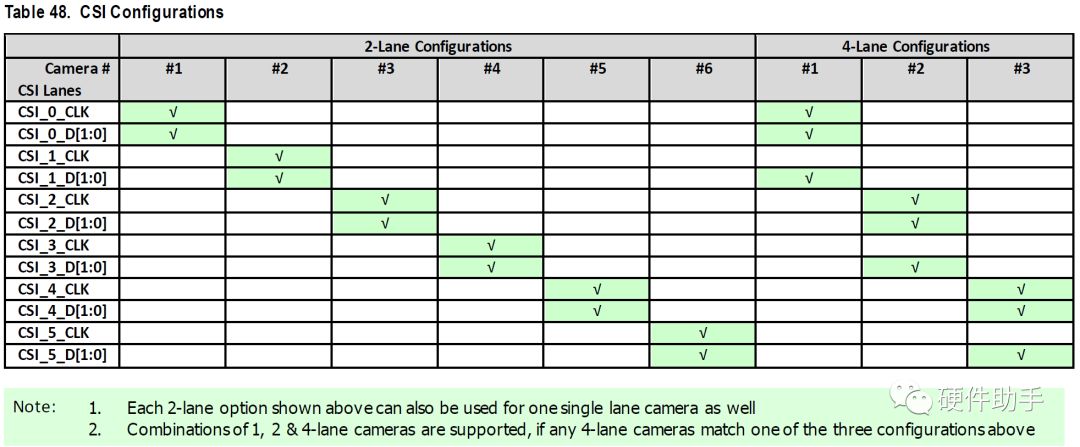
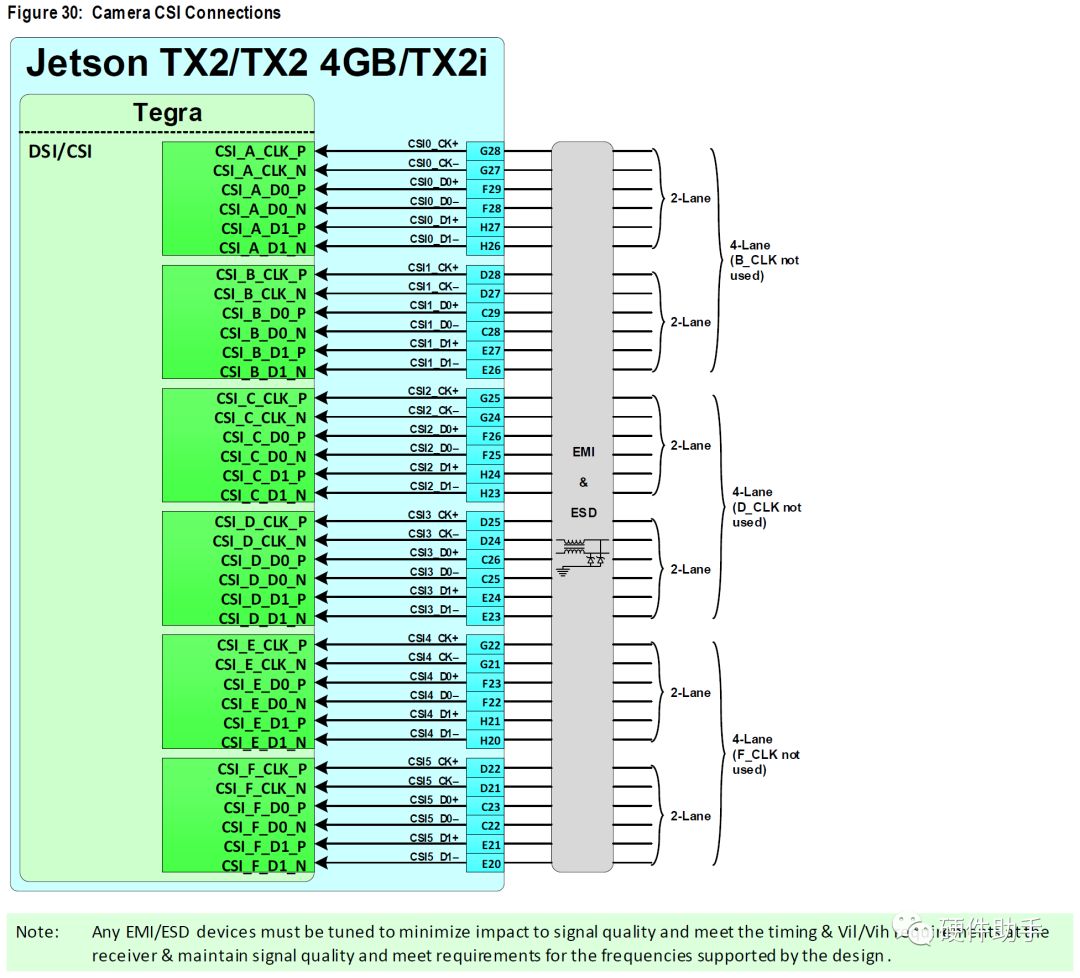
TX2开发板将所有CSI2接口都对外引出了,引脚定义基本兼容Xavier,如果要使用外部摄像头模组,需要采用转接板进行转接。
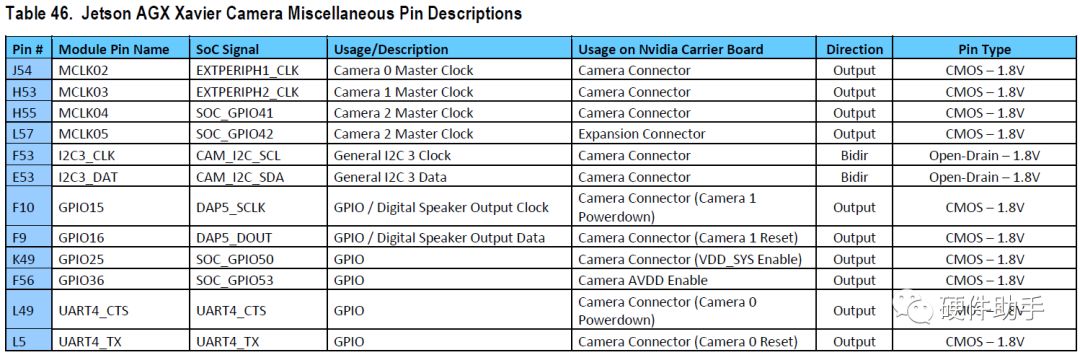
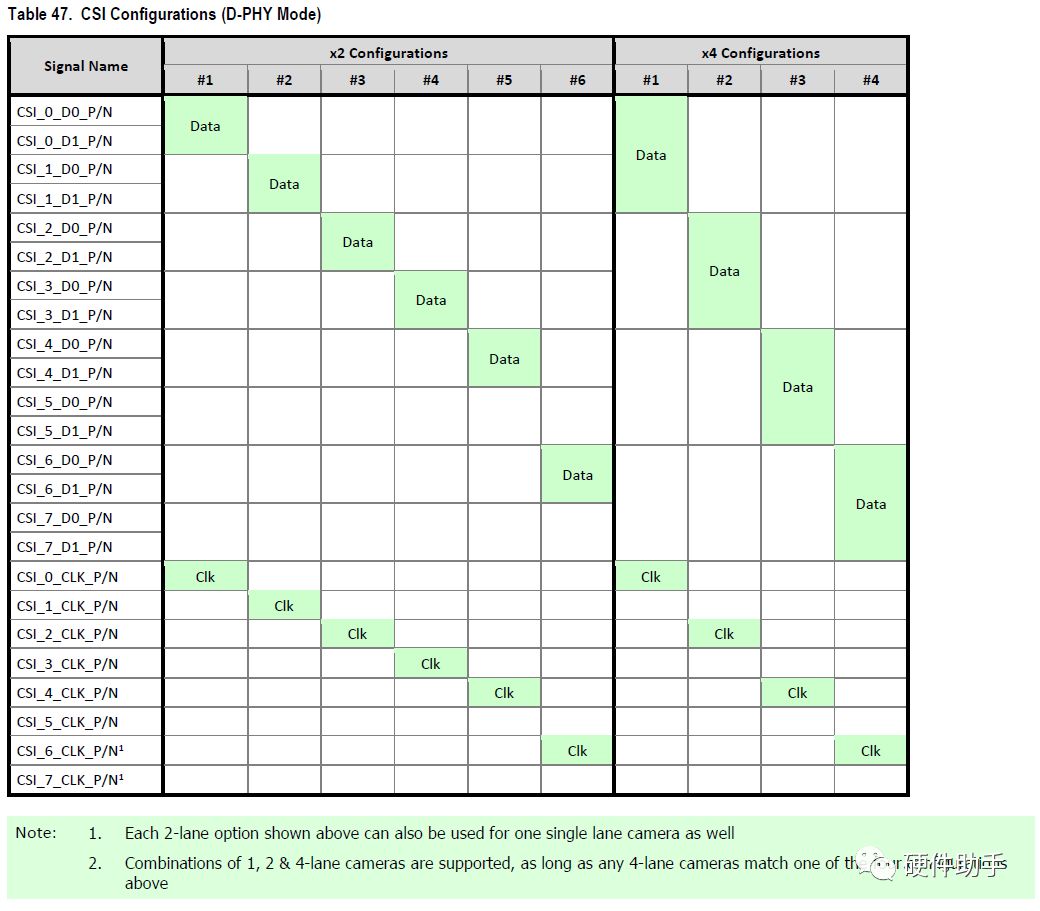
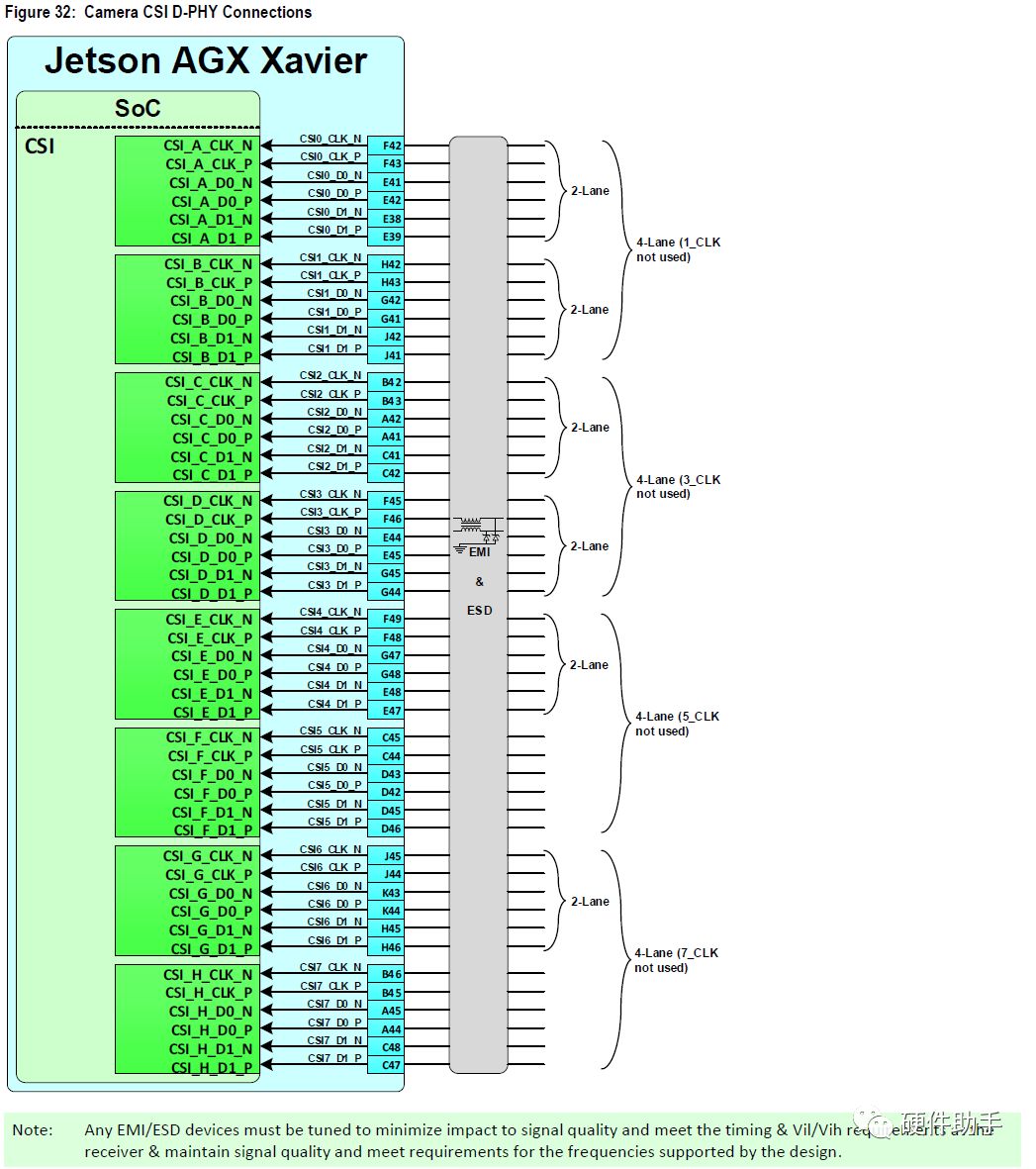
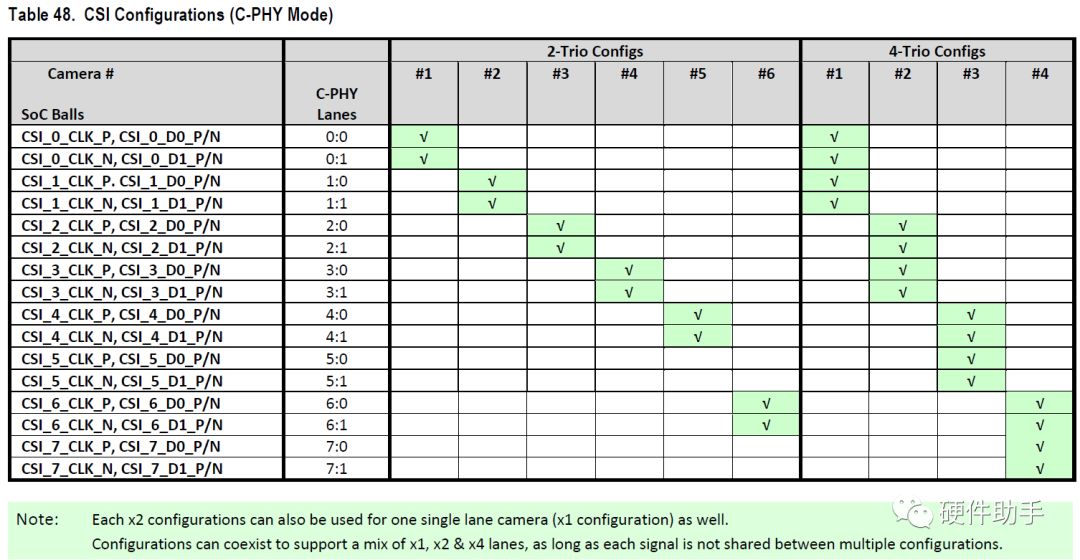
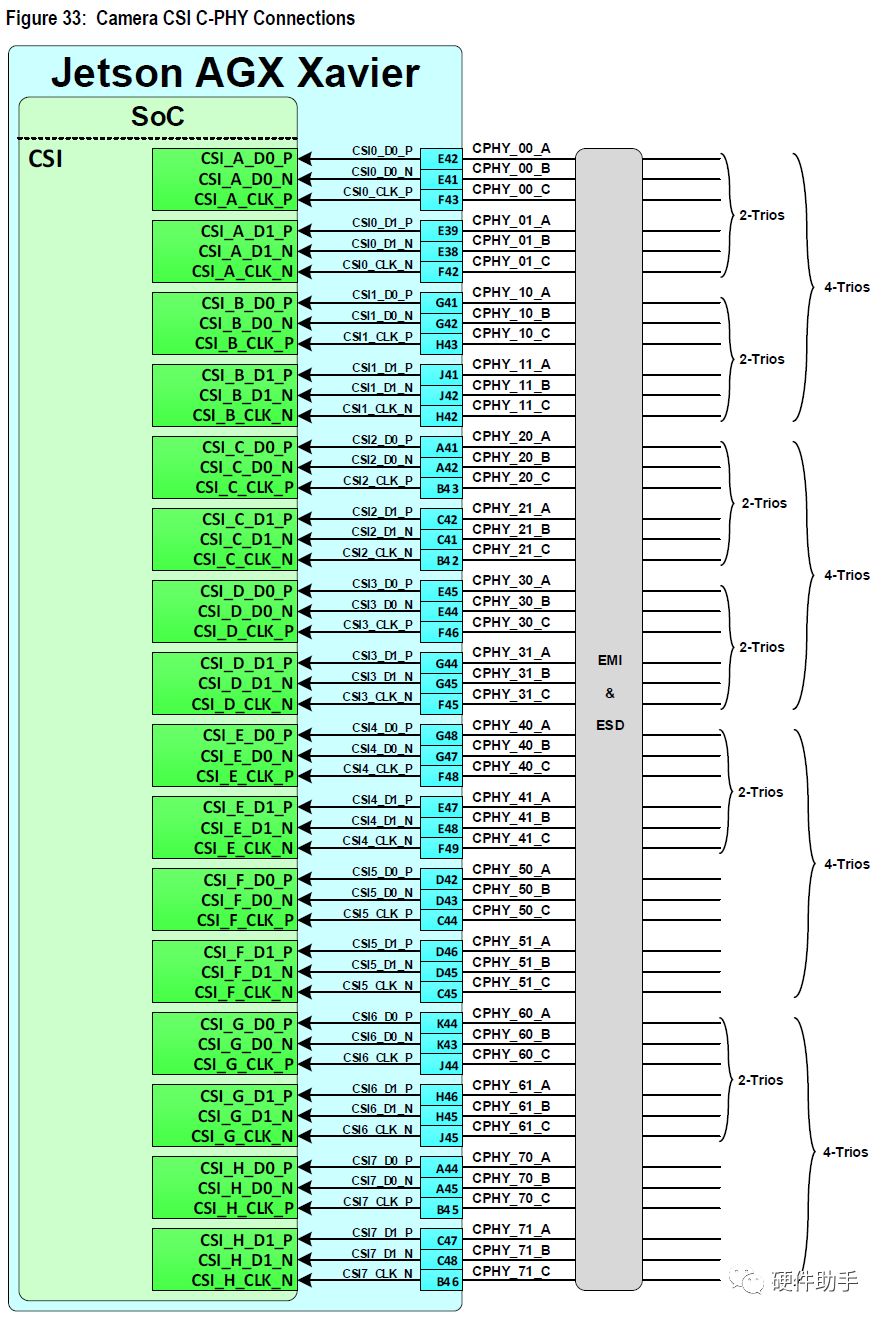
3、Xavier
Xavier的CSI接口,物理层支持C-PHY和D-PHY两种,对外引出16 lane CSI接口,每一个data lane的带宽可达2.5Gbps。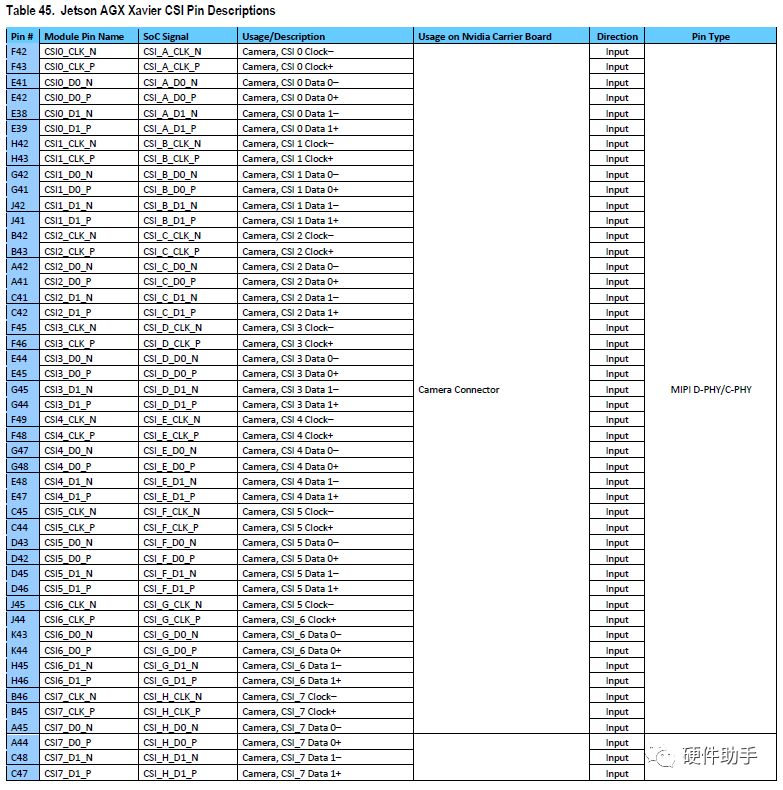

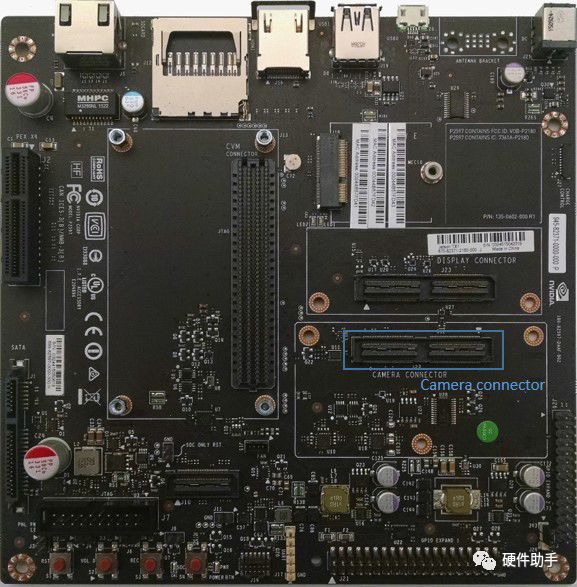
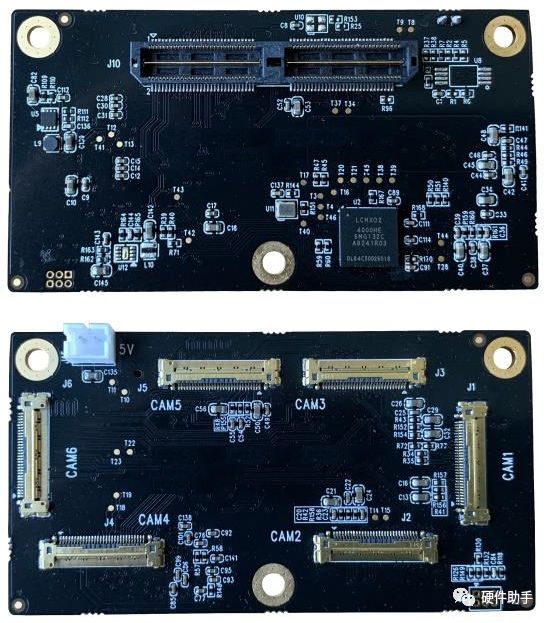
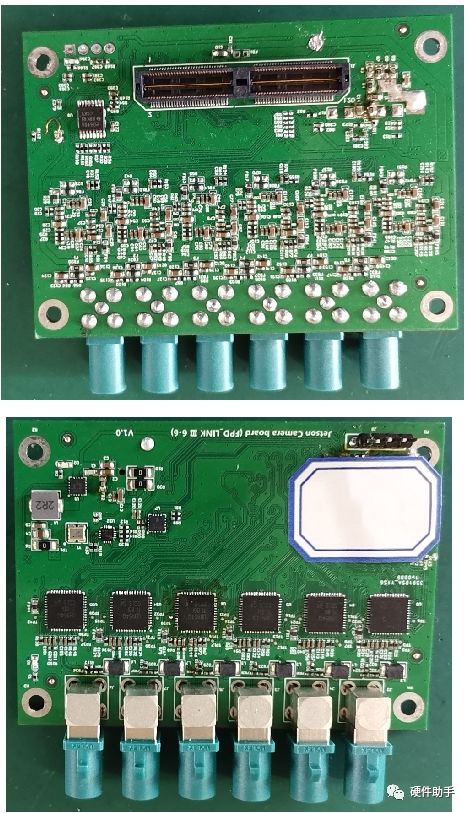
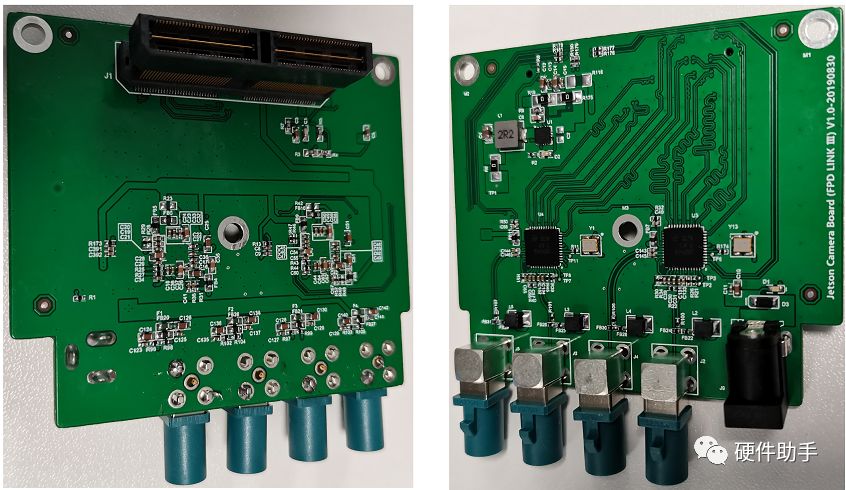
4、TX2/Xavier Camera Module转接板
由于TX2和Xavier的Camera接口都是采用Samtec的QSH-060-01-H-D-A-K-TR接插件引出,如果要外接Camera Module需要进行转接。 转接有很多种方式,可以根据不同的应用场景选择不同的对外接口形式,可以使用CSI 4lane,或者CSI 2lane,或者车载Fakra接头等等。 CSI相对比较简单,直接根据模组的CSI引脚定义对外引出即可。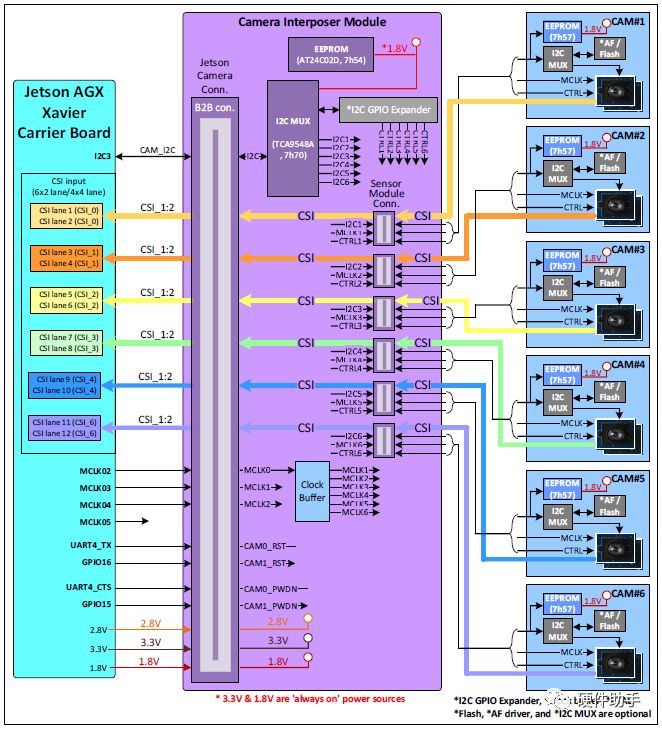
以上就是针对NVIDIA Jetson系列摄像头模组的硬件设计介绍,针对TX2和Xavier系列,外围摄像头模组转接板及配套驱动有需要的可以添加微信详询(15120013385),或者留言沟通,支持各种定制服务。
最后
以上就是虚幻月饼最近收集整理的关于nvidia的jetson系列的方案_NVIDIA Jetson系列之“Camera Module硬件设计”的全部内容,更多相关nvidia的jetson系列的方案_NVIDIA内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复