文章目录
- struct termios
- c_iflag c_oflag c_cflag c_lflag
- 速率
- tcgetattr和tcsetattr
- 串口流控
- 485收发控制
- 相关知识
- RK3399 UART特性
struct termios
kernel/arch/arm64/include/generated/asm/termios.h
kernel/include/asm-generic/termios.h
kernel/include/uapi/asm-generic/termios.h
kernel/include/uapi/asm-generic/termbits.h
c_iflag c_oflag c_cflag c_lflag
struct termios {
tcflag_t c_iflag; /* input mode flags */
tcflag_t c_oflag; /* output mode flags */
tcflag_t c_cflag; /* control mode flags */
tcflag_t c_lflag; /* local mode flags */
cc_t c_line; /* line discipline */
cc_t c_cc[NCCS]; /* control characters */
};
速率
/* c_cflag bit meaning */
#define CBAUD 0010017
#define B0 0000000 /* hang up */
#define B50 0000001
#define B75 0000002
#define B110 0000003
#define B134 0000004
#define B150 0000005
#define B200 0000006
#define B300 0000007
#define B600 0000010
#define B1200 0000011
#define B1800 0000012
#define B2400 0000013
#define B4800 0000014
#define B9600 0000015
#define B19200 0000016
#define B38400 0000017
#define EXTA B19200
#define EXTB B38400
#define CSIZE 0000060
#define CS5 0000000
#define CS6 0000020
#define CS7 0000040
#define CS8 0000060
#define CSTOPB 0000100
#define CREAD 0000200
#define PARENB 0000400
#define PARODD 0001000
#define HUPCL 0002000
#define CLOCAL 0004000
#define CBAUDEX 0010000
#define BOTHER 0010000
#define B57600 0010001
#define B115200 0010002
#define B230400 0010003
#define B460800 0010004
#define B500000 0010005
#define B576000 0010006
#define B921600 0010007
#define B1000000 0010010
#define B1152000 0010011
#define B1500000 0010012
#define B2000000 0010013
#define B2500000 0010014
#define B3000000 0010015
#define B3500000 0010016
#define B4000000 0010017
#define CIBAUD 002003600000 /* input baud rate */
#define CMSPAR 010000000000 /* mark or space (stick) parity */
#define CRTSCTS 020000000000 /* flow control */
struct termios oldtio,newtio;
speed_t speed = B4000000;
tcgetattr(fd,&oldtio);
bzero(&newtio,sizeof(newtio));
newtio.c_cflag = speed|CS8|CLOCAL|CREAD;
newtio.c_cflag &= ~CSTOPB;
newtio.c_cflag &= ~PARENB;
newtio.c_iflag = IGNPAR;
newtio.c_oflag = 0;
tcflush(fd,TCIFLUSH);
tcsetattr(fd,TCSANOW,&newtio);
tcgetattr(fd,&oldtio);
tcgetattr和tcsetattr
int tcgetattr(int fd, struct termios *termios_p);
tcgetattr函数用于获取与终端相关的参数。参数fd为终端的文件描述符,返回的结果保存在termios 结构体中,该结构体一般包括如下的成员:
tcflag_t c_iflag;
tcflag_t c_oflag;
tcflag_t c_cflag;
tcflag_t c_lflag;
cc_t c_cc[NCCS];
int tcsetattr(int fd, int optional_actions, const struct termios *termios_p);
tcsetattr函数用于设置终端参数。函数在成功的时候返回0,失败的时候返回-1,并设置errno的值。参数fd为打开的终端文件描述符,参数optional_actions用于控制修改起作用的时间,而结构体termios_p中保存了要修改的参数。optional_actions可以取如下的值。
TCSANOW:不等数据传输完毕就立即改变属性。
TCSADRAIN:等待所有数据传输结束才改变属性。
TCSAFLUSH:等待所有数据传输结束,清空输入输出缓冲区才改变属性。
错误信息:
EBADF:非法的文件描述符。
EINTR:tcsetattr函数调用被信号中断。
EINVAL:参数optional_actions使用了非法值,或参数termios中使用了非法值。
ENOTTY:非终端的文件描述符。
串口流控
参考链接:
https://blog.csdn.net/u010591305/article/details/44747805
数据在两个串口之间传输时,常常会出现丢失数据的现象,或者两台计算机的处理速度不同,如台式机与单片机之间的通讯,
接收端数据缓冲区已满,则此时继续发送来的数据就会丢失。现在我们在网络上通过MODEM进行数据传输,这个问题就尤为突出。
流控制能解决这个问题,当接收端数据处理不过来时,就发出“不再接收”的信号,发送端就停止发送,直到收到“可以继续发送”的信号再发送数据。
因此流控制可以控制数据传输的进程,防止数据的丢失。 PC机中常用的两种流控制是硬件流控制(包括RTS/CTS、DTR/CTS等)和软件流控制XON/XOFF(继续/停止)。
hardware
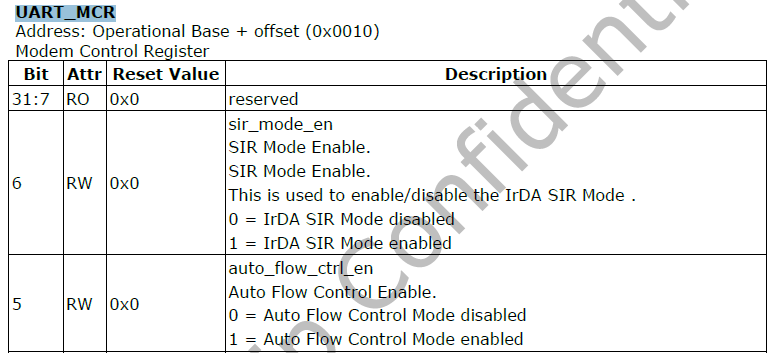
Auto Flow Control
The UART can be configured to have a 16750-compatible Auto RTS and Auto CTS serial data flow control mode available. If FIFOs are not implemented, then this mode cannot be selected.When Auto Flow Control mode has been selected, it can be enabled with the Modem Control Register (MCR[5]). Following figure shows a block diagram of the Auto Flow Control functionality.
Auto RTS – Becomes active when the following occurs:
Auto Flow Control is selected during configuration
FIFOs are implemented
RTS (MCR[1] bit and MCR[5]bit are both set)
FIFOs are enabled (FCR[0]) bit is set)
SIR mode is disabled (MCR[6] bit is not set)
Auto CTS – becomes active when the following occurs:
Auto Flow Control is selected during configuration
FIFOs are implemented
AFCE (MCR[5] bit is set)
FIFOs are enabled through FIFO Control Register FCR[0] bit
SIR mode is disabled (MCR[6] bit is not set)


software
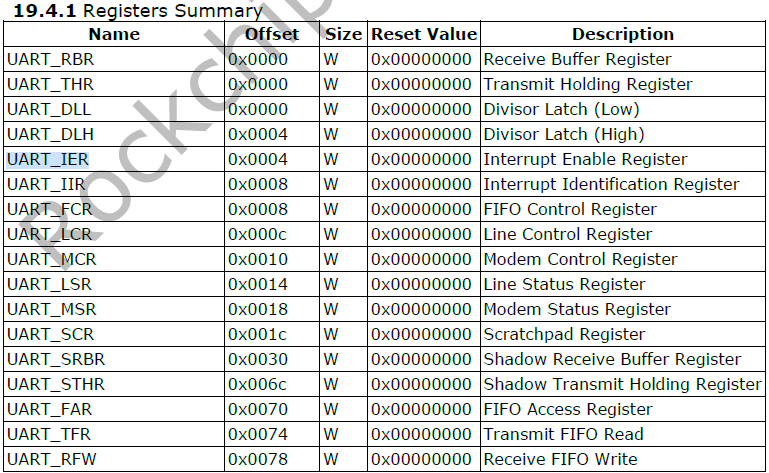
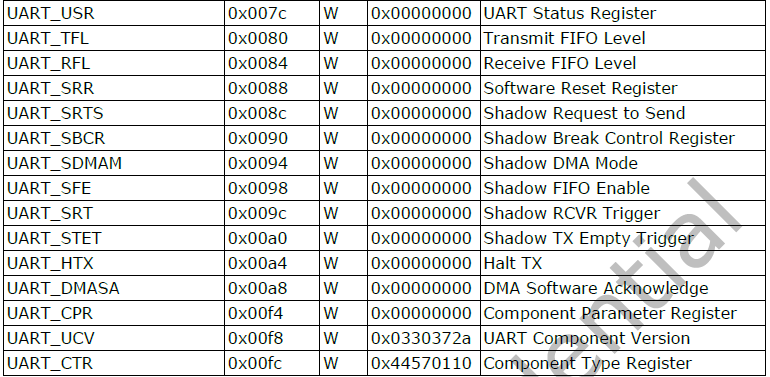
代码路径
drivers/tty/serial/8250/8250.h
drivers/tty/serial/8250/8250_core.c
drivers/tty/serial/8250/8250_dma.c dma实现
drivers/tty/serial/8250/8250_dw.c design ware ip相关操作
drivers/tty/serial/8250/8250_early.c early console实现
drivers/tty/serial/8250/8250_fsl.c
drivers/tty/serial/8250/8250.c
drivers/tty/serial/8250/8250_port.c 端口相关的接口
drivers/tty/serial/earlycon.c 解析命令行参数,并提供注册early con接口
kernel/include/uapi/linux/serial_reg.h
#define UART_MCR 4 /* Out: Modem Control Register */
#define UART_MCR_CLKSEL 0x80 /* Divide clock by 4 (TI16C752, EFR[4]=1) */
#define UART_MCR_TCRTLR 0x40 /* Access TCR/TLR (TI16C752, EFR[4]=1) */
#define UART_MCR_XONANY 0x20 /* Enable Xon Any (TI16C752, EFR[4]=1) */
#define UART_MCR_AFE 0x20 /* Enable auto-RTS/CTS (TI16C550C/TI16C750) */
#define UART_MCR_LOOP 0x10 /* Enable loopback test mode */
#define UART_MCR_OUT2 0x08 /* Out2 complement */
#define UART_MCR_OUT1 0x04 /* Out1 complement */
#define UART_MCR_RTS 0x02 /* RTS complement */
#define UART_MCR_DTR 0x01 /* DTR complement */
#define UART_FCR 2 /* Out: FIFO Control Register */
#define UART_FCR_ENABLE_FIFO 0x01 /* Enable the FIFO */
#define UART_FCR_CLEAR_RCVR 0x02 /* Clear the RCVR FIFO */
#define UART_FCR_CLEAR_XMIT 0x04 /* Clear the XMIT FIFO */
#define UART_FCR_DMA_SELECT 0x08 /* For DMA applications */
drivers/tty/serial/8250/8250.h
#define UART_CAP_AFE (1 << 11) /* MCR-based hw flow control */
void
serial8250_do_set_termios(struct uart_port *port, struct ktermios *termios,
struct ktermios *old)
{
...
/*
* MCR-based auto flow control. When AFE is enabled, RTS will be
* deasserted when the receive FIFO contains more characters than
* the trigger, or the MCR RTS bit is cleared. In the case where
* the remote UART is not using CTS auto flow control, we must
* have sufficient FIFO entries for the latency of the remote
* UART to respond. IOW, at least 32 bytes of FIFO.
*/
if (up->capabilities & UART_CAP_AFE && port->fifosize >= 32) {
up->mcr &= ~UART_MCR_AFE;
if (termios->c_cflag & CRTSCTS)
up->mcr |= UART_MCR_AFE;
}
应用里面将termios->c_cflag置位CRTSCTS后,串口MCR寄存器就会打开auto flow control。
添加支持流控的uart节点
kernel/arch/arm64/boot/dts/rockchip/OK3399-C.dts
&uart0 {
pinctrl-names = "default";
pinctrl-0 = <&uart0_xfer &uart0_cts &uart0_rts>;
status = "okay";
};
编写应用测试收发即可
485收发控制
TBC
==================================================
相关知识
RK3399 UART特性
最高支持4M波特率
UART0、3支持硬件自动流控
支持中断传输模式和DMA传输模式
最后
以上就是淡淡星月最近收集整理的关于通用接口(4)——UART & 485struct termios串口流控485收发控制相关知识的全部内容,更多相关通用接口(4)——UART内容请搜索靠谱客的其他文章。



![[labview]做一个简单实用可扩展功能的高速串口发送(接收)调试器](https://www.shuijiaxian.com/files_image/reation/bcimg13.png)




发表评论 取消回复