ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。
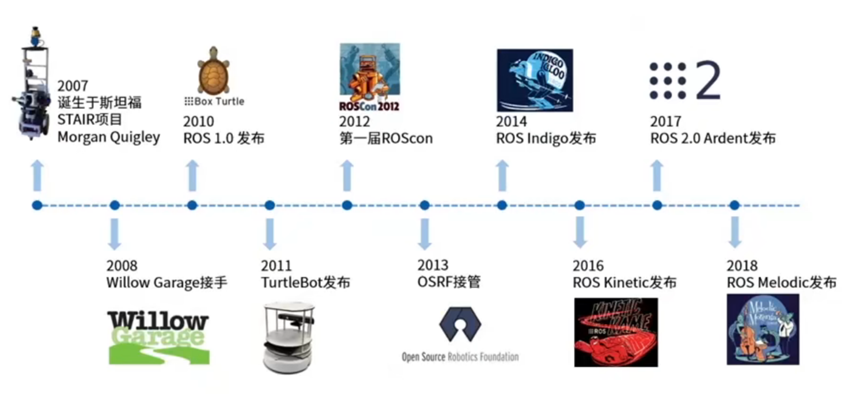
ROS系统起源于2007年,斯坦福大学人工智能实验室与机器人技术公司Willow Garage针对其个人机器人项目(Personal Robots Program)开发了ROS的雏形。2008年后,由Willow Garage公司推动了ROS的进一步发展。2012年后,ROS团队从WillowGarage公司独立出来,成为非盈利组织the Open Source Robotics Foundation(OSRF),负责维护和更新ROS,并为机器人社区提供相应的支持和开源工具。
它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。ROS 的主要目标是为机器人研究和开发提供代码复用的支持。ROS是一个分布式的进程(也就是“节点”)框架,这些进程被封装在易于被分享和发布的程序包和功能包中。
我们主要从下十个方面进行介绍Mycobot的ROS基础。
1、ROS的工作空间
2、launch文件和服务器参数配置
3、ROS的话题
4、RVIZ的配置
5、RQT可视化工具
6、TF坐标变换
7、ROS的多机通讯
8、OAK的双目视觉
9、ROS Moveit
10、ROS1与ROS2
一:工作空间
工作空间:存放工程文件的文件夹
workspace
|-build (编译过程中产生的中间文件)
|-src (代码文件)
|-devel (编译生成的目标文件)
二:创建工作空间
1、创建文件夹
mkdir -p ~/mycobot/src
2、进入文件夹
cd ~/mycobot/src
3、初始化工作空间
catkin_init_workspace
4、编译工作空间
cd ..
catkin_make
5、修改环境变量
cd..
vim .bashrc
source /home/mycobot/devel/setup.bash
source .bashrc
6、查看ROS的环境变量
echo $ROS_PACHAGE_PATH
最后
以上就是威武海燕最近收集整理的关于Mycobot六轴机械臂(八)--ROS仿真的全部内容,更多相关Mycobot六轴机械臂(八)--ROS仿真内容请搜索靠谱客的其他文章。








发表评论 取消回复