目录
一、源码下载及编译
1、相关参考网站
2、创建工作空间及源码下载
二、对openmanipulator进行仿真
前面的一段时间,针对自己的机器人做了模型配置,moveit配置等,但想真正的实现真是机器人还有很远的举例,自己也没有成熟的经验,所以参考成熟的产品及相应源码,肯定会有所帮助,本文记录了编译openmanipulator相关源码的详细过程及注意事项。
一、源码下载及编译
1、相关参考网站
(1)、创客智造:https://www.ncnynl.com/archives/201903/2849.html
(2)、openmanipulator官网:https://emanual.robotis.com/docs/en/platform/openmanipulator_x/overview/#overview
2、创建工作空间及源码下载
(1)参考网站里面由详细介绍,但为了查阅方便,这里也简要记录以下。首先安装如下相关功能包:
sudo apt-get install ros-melodic-ros-controllers ros-melodic-gazebo* ros-melodic-moveit* ros-melodic-industrial-core(2)然后用如下方式创建工作空间。
cd ~
mkdir -p catkin_ws/src(3)按照如下方式下载源码并进行编译,注意下载源码时将https换为git速度可能会快一点。
cd ~/catkin_ws/src/
git clone git://github.com/ROBOTIS-GIT/DynamixelSDK.git
git clone git://github.com/ROBOTIS-GIT/dynamixel-workbench.git
git clone git://github.com/ROBOTIS-GIT/dynamixel-workbench-msgs.git
git clone git://github.com/ROBOTIS-GIT/open_manipulator.git
git clone git://github.com/ROBOTIS-GIT/open_manipulator_msgs.git
git clone git://github.com/ROBOTIS-GIT/open_manipulator_simulations.git
git clone git://github.com/ROBOTIS-GIT/robotis_manipulator.git
git clone git://github.com/ROBOTIS-GIT/open_manipulator_applications.git
git clone git://github.com/ROBOTIS-GIT/open_manipulator_controls.git
cd ~/catkin_ws && catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc(4)编译问题
如果能正常编译,那是最好,但如果安装了anoconda软件,又可能会存在报“uuid_generate@UUID_1.0”错误的情况,这里记录遇到这种问题时的解决办法,如下,其中,xxx表示用户名。具体可查看该博客,记录得比较详细。
sudo rm /home/xxx/anaconda3/lib/libuuid.so.1
sudo ln -s /lib/x86_64-linux-gnu/libuuid.so.1 /home/xxx/anaconda3/lib/libuuid.so.1二、对openmanipulator进行仿真
由于是进行仿真,为了方便输入,这里将open_manipulator包下面的open_manipulator_controller文件夹下面的open_manipulator_controller.launch文件做了如下修改:
<launch>
<arg name="usb_port" default="/dev/ttyUSB0"/>
<arg name="baud_rate" default="1000000"/>
<arg name="control_period" default="0.010"/>
<arg name="use_platform" default="false"/> <!-- true for actual, false for simulation -->
<node name="open_manipulator_controller" pkg="open_manipulator_controller" type="open_manipulator_controller"
output="screen" args="$(arg usb_port) $(arg baud_rate)">
<param name="control_period" value="$(arg control_period)"/>
<param name="using_platform" value="$(arg use_platform)"/>
</node>
</launch>
然后在三个窗口中分别输入如下命令,即可通过其GUI控制gazebo中的机械臂。
第一个窗口:
roslaunch open_manipulator_controller open_manipulator_controller.launch第二个窗口打开gazebo:
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch第三个窗口打开控制界面:
roslaunch open_manipulator_control_gui open_manipulator_control_gui.launch然后会由如下操作界面,完成图中标的两步后,所见及所得,通过该界面即可控制gazebo中的仿真模型运动:
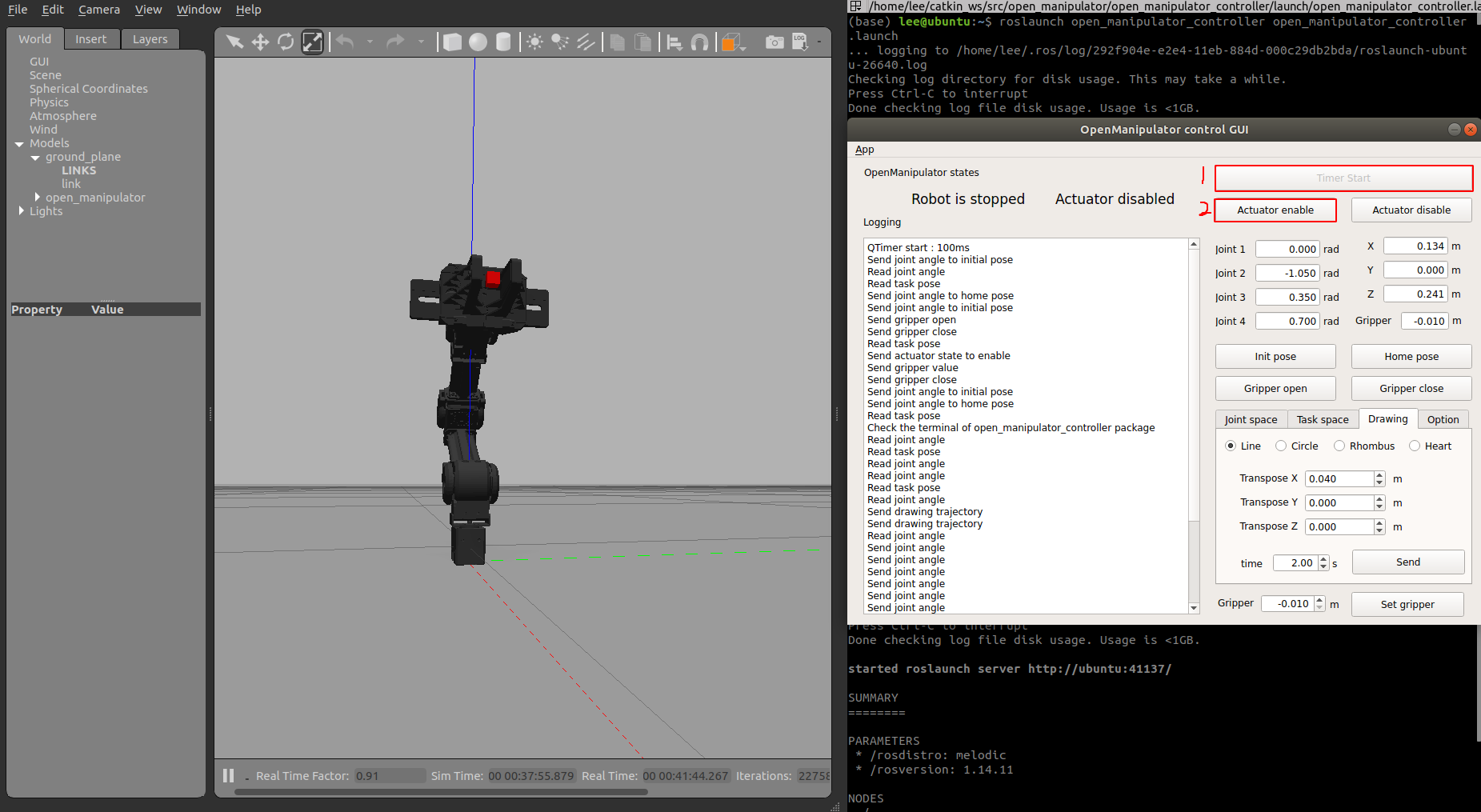
openmanipulator的功能远不止这些,肯定还需要进一步探索,但通过学习该开源项目并灵活用到自己的项目中,才是最重要的,这里仅仅是记录,方便自己以后查阅,同时,如果对遇到相同问题的同志有所启发,那是更好,对文中提到的链接表示感谢。
最后
以上就是英俊冥王星最近收集整理的关于ros melodic控制真实机械臂之openmanipulator参考一、源码下载及编译二、对openmanipulator进行仿真的全部内容,更多相关ros内容请搜索靠谱客的其他文章。








发表评论 取消回复