目录
前言
一、参考文献
二、安装步骤
1.安装程序
2.安装依赖库
3.安装OpenSceneGraph-3.4
4.安装Flexible Collision Library 0.5.0
5.安装sympy 0.7.1(注意版本,若版本不对会产生错误)
6.删除mpmath
7.安装MoveIt! IKFast
8.安装OpenRAVE
三、修改安装步骤
1.安装程序与依赖库
2.安装OpenSceneGraph-3.4
3.安装Flexible Collision Library 0.5.0
4.安装OpenRAVE
总结
前言
研一小萌新一个,正在学习如何使用实验室的UR3机器人,由于最近要用到IK fast插件,需要安装OpenRAVE。但是目前的最新教程一般都是ubuntu16.04+ROS kinetic,而我的电脑安装的是ubuntu18.04+ ROS melodic版本,下面记录以下我的安装过程以及其中遇到的一些问题。
一、参考文献
将参考文献放在最前面,感谢安装过程中各位大佬们blog的帮助。
- moveit官方教程(选择melodic版本)http://docs.ros.org/melodic/api/moveit_tutorials/html/doc/ikfast/ikfast_tutorial.html
- UR5-配置MoveIt!运动学插件IKFASThttps://blog.csdn.net/harrycomeon/article/details/95517129?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-5.channel_param&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-5.channel_param
- Installing OpenRAVE on Ubuntu 16.04https://scaron.info/teaching/installing-openrave-on-ubuntu-16.04.html
-
ROS进阶——MoveIt!运动学插件IKFAST配置 https://blog.csdn.net/Kalenee/article/details/80740258
-
ubuntu安装openrave的简单方法https://blog.csdn.net/weixin_40512647/article/details/105719908
二、安装步骤
所有从github上git clone的最好放到自己的gitee上下载,不然速度很慢,特别是OpenSceneGraph和OpenRAVE,比较大。
1.安装程序
sudo apt-get install cmake g++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-tools2.安装依赖库
sudo apt-get install libassimp-dev libavcodec-dev libavformat-dev libavformat-dev libboost-all-dev libboost-date-time-dev libbullet-dev libfaac-dev libglew-dev libgsm1-dev liblapack-dev liblog4cxx-dev libmpfr-dev libode-dev libogg-dev libpcrecpp0v5 libpcre3-dev libqhull-dev libqt4-dev libsoqt-dev-common libsoqt4-dev libswscale-dev libswscale-dev libvorbis-dev libx264-dev libxml2-dev libxvidcore-dev此处安装依赖库时,会出现依赖包libjasper-dev无法安装的问题,解决办法如下:
sudo add-apt-repository "deb http://archive.ubuntu.com/ubuntu/ trusty main universe restricted multiverse"
sudo apt update
sudo apt install libjasper1 libjasper-dev3.安装OpenSceneGraph-3.4
sudo apt-get install libcairo2-dev libjasper-dev libpoppler-glib-dev libsdl2-dev libtiff5-dev libxrandr-dev
git clone https://github.com/openscenegraph/OpenSceneGraph.git --branch OpenSceneGraph-3.4
cd OpenSceneGraph
mkdir build; cd build
cmake .. -DDESIRED_QT_VERSION=4
make -j$(nproc)
sudo make install如果后面安装OpenRAVE出现错误,需要进行如下修改(最好是直接加上下面这句):
sudo make install_ld_conf
4.安装Flexible Collision Library 0.5.0
git clone https://github.com/flexible-collision-library/fcl
cd fcl; git checkout 0.5.0
mkdir build; cd build
cmake ..
make -j `nproc`
sudo make install5.安装sympy 0.7.1(注意版本,若版本不对会产生错误)
注意是否下载了anaconda,安装前请退出,不然会报错,conda deactivate
pip install --upgrade --user sympy==0.7.16.删除mpmath
sudo apt remove python-mpmath7.安装MoveIt! IKFast
git clone https://github.com/ros-planning/moveit.git8.安装OpenRAVE
git clone --branch latest_stable https://github.com/rdiankov/openrave.git
cd openrave && mkdir build && cd build
cmake -DODE_USE_MULTITHREAD=ON -DOSG_DIR=/usr/local/lib64/ ..
make -j$(nproc)
sudo make install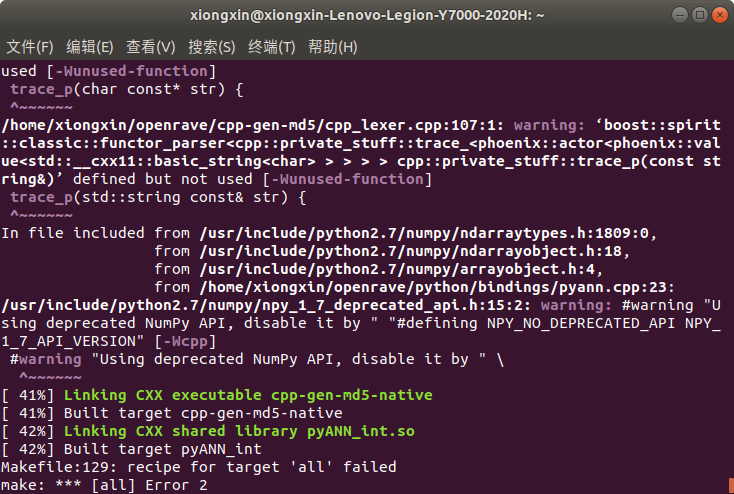
提示出现这样的错误,重新下载安装了好几遍,一直重复报该问题的错误,还没有找到比较好的解决办法。
三、修改安装步骤
修改思路来自:https://github.com/crigroup/openrave-installation
git clone https://github.com/crigroup/openrave-installation
cd openrave-installation
./install-dependencies.sh
./install-osg.sh
./install-fcl.sh
./install-openrave.sh查看openrave-installation中的每个文件发现其实跟前面的步骤差不多,只是对于ubuntu18.04,cmake时有些区别,但因为每个安装文件其实是在调用github下载安装,而github限速太明显,而采用gitee下载则明显快速很多。因此根据第二大节中的安装步骤参考上述的文件做相应更改。若需要下载速度加快,将git clone时github地址改为自己的gitee地址就行。
1.安装程序与依赖库
sudo apt-get install cmake g++ git ipython minizip python-dev python-h5py python-numpy python-scipy qt4-dev-toolssudo apt-get install libassimp-dev libavcodec-dev libavformat-dev libavformat-dev libboost-all-dev libboost-date-time-dev libbullet-dev libfaac-dev libglew-dev libgsm1-dev liblapack-dev liblog4cxx-dev libmpfr-dev libode-dev libogg-dev libpcrecpp0v5 libpcre3-dev libqhull-dev libqt4-dev libsoqt-dev-common libsoqt4-dev libswscale-dev libswscale-dev libvorbis-dev libx264-dev libxml2-dev libxvidcore-dev2.安装OpenSceneGraph-3.4
其中将{OSG_COMMIT}替换成1f89e6eb1087add6cd9c743ab07a5bce53b2f480,对于ubuntu14.04的用户,直接使用cmake ..就行了,但是对于ubuntu16.04/18.04/20.04的用户,均为cmake -DDESIRED_QT_VERSION=4 ..
git clone https://github.com/openscenegraph/OpenSceneGraph.git
cd OpenSceneGraph
git reset --hard {OSG_COMMIT}
mkdir build
cd build
cmake -DDESIRED_QT_VERSION=4 ..
sudo make install_ld_conf
make -j `nproc`
sudo make install
3.安装Flexible Collision Library 0.5.0
git clone https://github.com/flexible-collision-library/fcl
cd fcl
git reset --hard 0.5.0
mkdir build
cd build
cmake ..
make -j `nproc`
sudo make install
4.安装OpenRAVE
在安装OpenRAVE前请根据2.5,2.6和2.7安装sympy 0.7.1,删除mpmath和安装MoveIt! IKFast。然后安装OpenRAVE:
对于ubuntu14.04/16.04/18.04(RAVE_COMMIT=7c5f5e27eec2b2ef10aa63fbc519a998c276f908)
git clone https://github.com/rdiankov/openrave.git
对于ubuntu20.04(RAVE_COMMIT=2024b03554c8dd0e82ec1c48ae1eb6ed37d0aa6e)
git clone -b production https://github.com/rdiankov/openrave.gitcd openrave
git reset --hard {RAVE_COMMIT}
mkdir build
cd build{RAVE_COMMIT}换成与自己版本对应的值
对于ubuntu14.04/16.04
cmake -DODE_USE_MULTITHREAD=ON -DOSG_DIR=/usr/local/lib64/ ..
对于ubuntu18.04
cmake -DODE_USE_MULTITHREAD=ON -DCMAKE_CXX_STANDARD=11
-DBoost_NO_SYSTEM_PATHS=TRUE -DBOOST_ROOT=/usr/local/ ..
对于ubuntu20.04
cmake -DODE_USE_MULTITHREAD=ON -DOSG_DIR=/usr/local/lib64/
-DUSE_PYBIND11_PYTHON_BINDINGS:BOOL=TRUE
-DBoost_NO_BOOST_CMAKE=1 ..
四、总结
今天配置OpenRAVE花了很久,也踩了很多坑,最后终于配置好了环境,明天开始配置IKFAST插件。
最后
以上就是繁荣香氛最近收集整理的关于ubuntu18.04环境下为UR3配置MoveIt!运动学插件IKFAST(一)目录前言一、参考文献二、安装步骤三、修改安装步骤四、总结的全部内容,更多相关ubuntu18.04环境下为UR3配置MoveIt内容请搜索靠谱客的其他文章。








发表评论 取消回复