一、通过moveit_setup_assistant进行配置
二、运行配置后的功能包
通过上一篇已经知道如何将三维模型导入到ros系统中,该篇主要记录通过moveit_setup_assistant为上一篇生成的模型配置相关的运动库,避障模块等让其能够在仿真平台上动起来。moveit的安装可查阅moveit官网,选择相应的版本,这里不再赘述。
一、通过moveit_setup_assistant进行配置
按如下指令启动setup_assistant
roslaunch moveit_setup_assistant setup_assistant.launch启动后得到如下界面 。
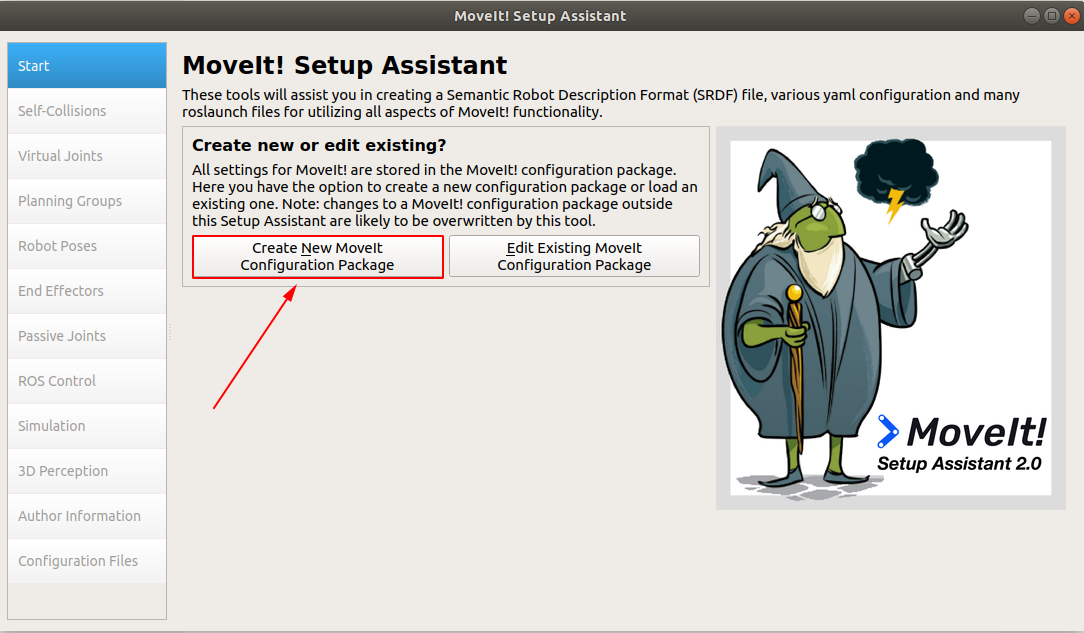
如上图,选择Create New Moveit Configuration Package,得到如下图所示界面。
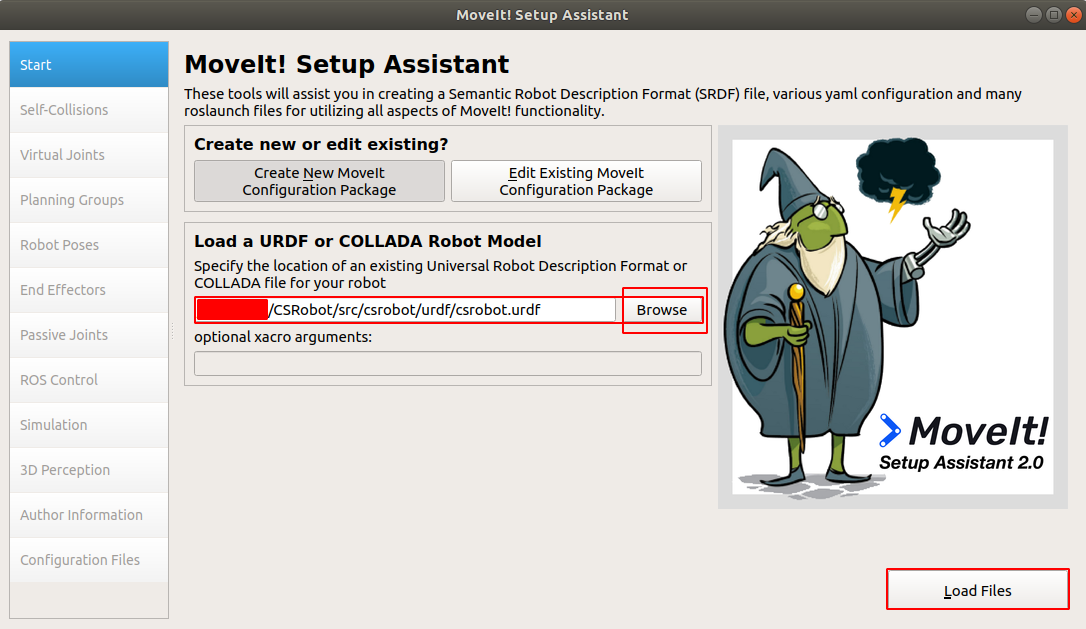
选择刚才上一篇中生成的urdf文件,点击Load Files,得到如下图所示界面。
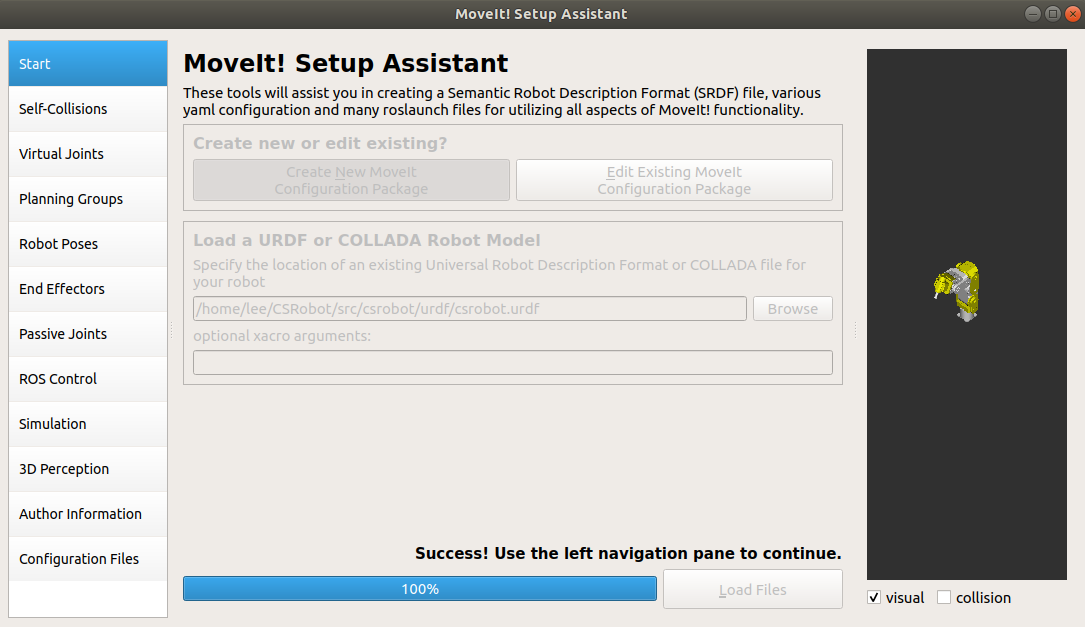
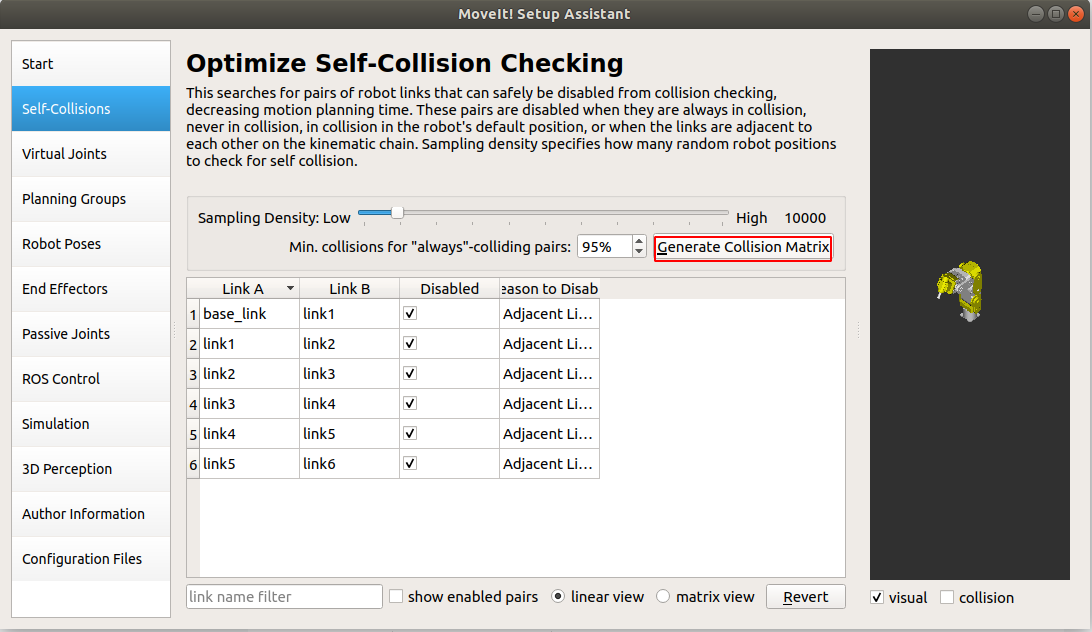
加载成功之后,机械臂模型会显示在右边的显示框中。然后点击左边任务栏Self-Collsions进行配置。一般默认就好,如下图所示。
然后点击任务栏第三项Virtual Joints, 得到如下图所示界面。
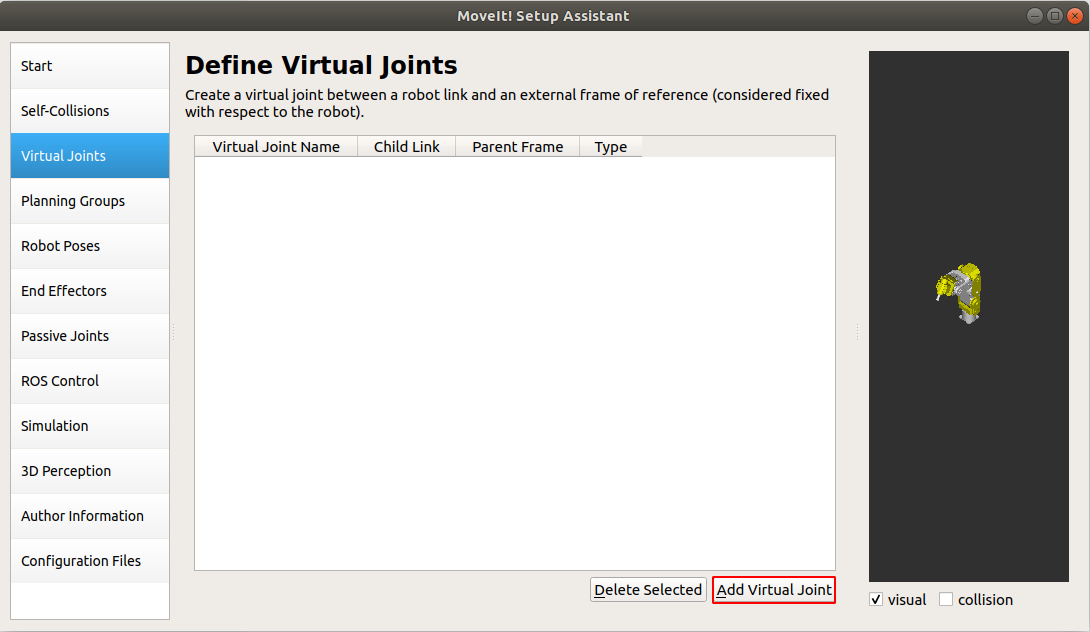
点击Add Virtual Joints,得到如下图所示界面并按照如下图进行配置。
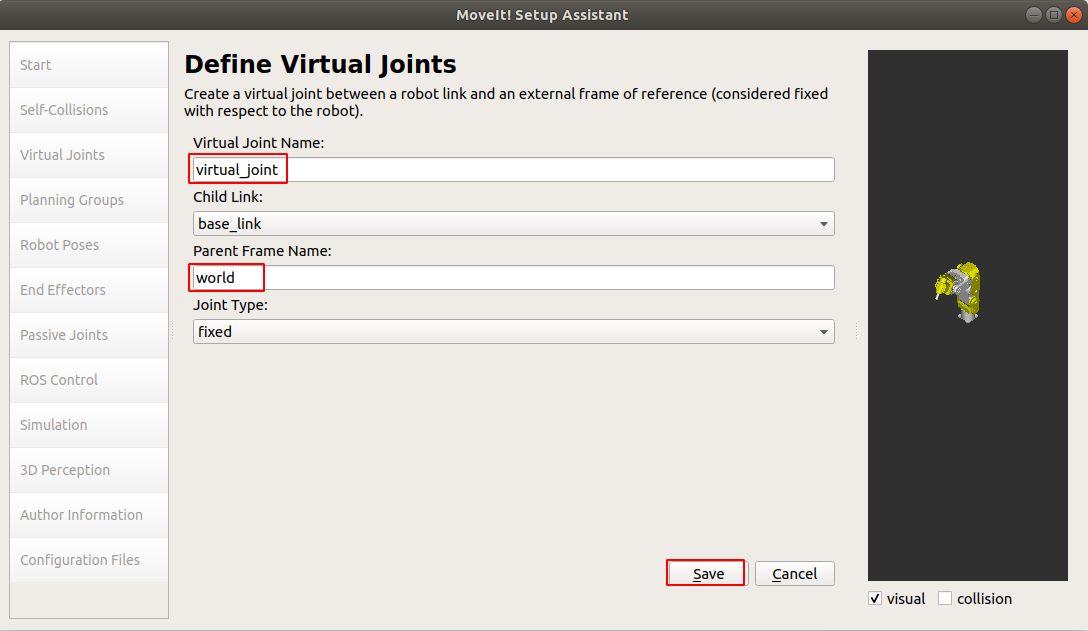
完成后,点击Save,得到如下图所示界面。在点击左侧任务栏Planning Groups,添加任务组,得到如下图所示界面。
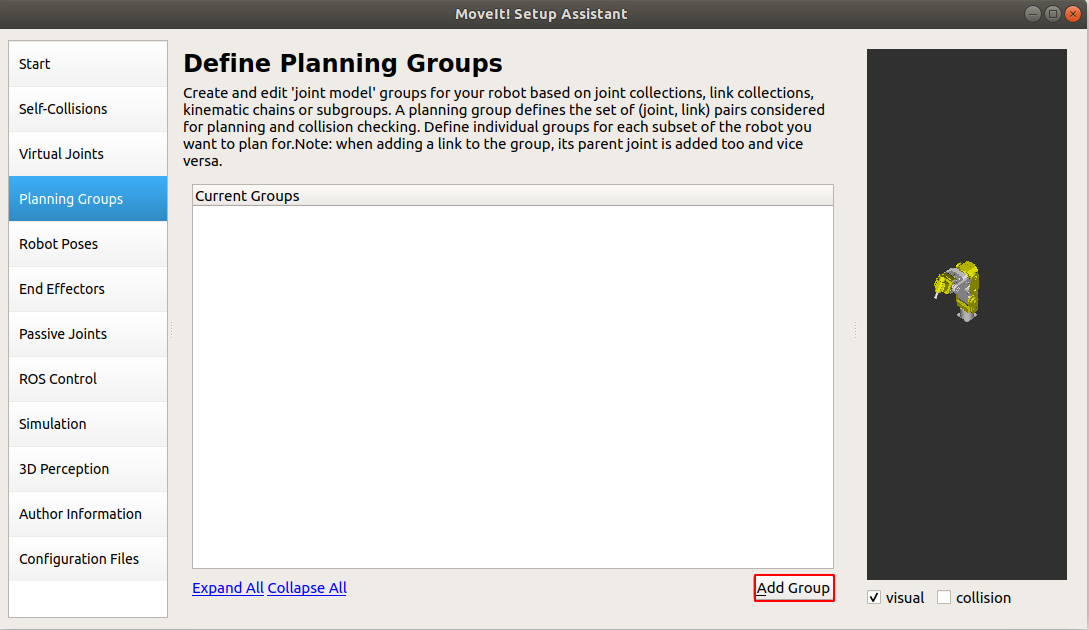
点击Add Group后得到如下图所示界面,并按如下图进行配置。
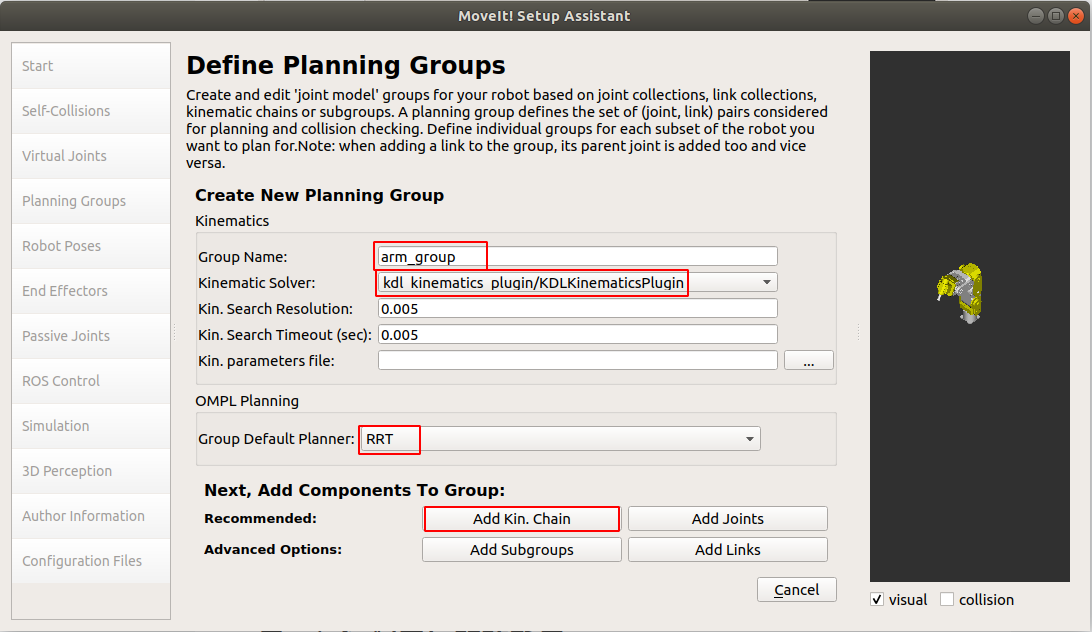
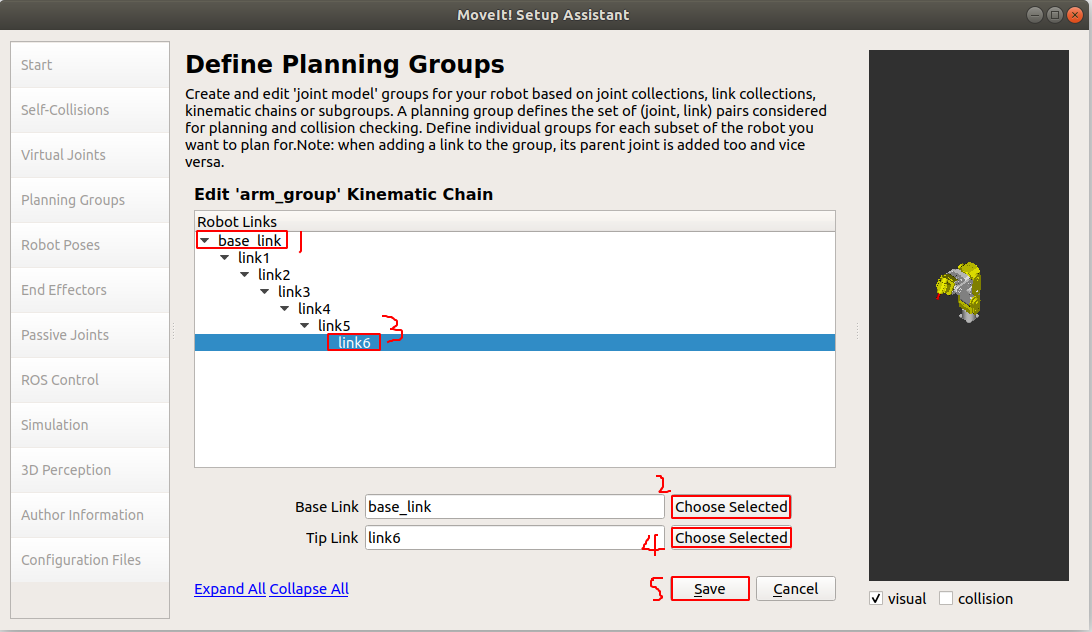
配置完成后,点击Add Kin. Chain,得到如下图所示界面,并按图中所示步骤进行配置。
点击Save后根据自己的需要看是否还需要添加运动组,如需要,根以上步骤一致。然后点击左侧任务栏Robot Poses,得到如下图所示画面。
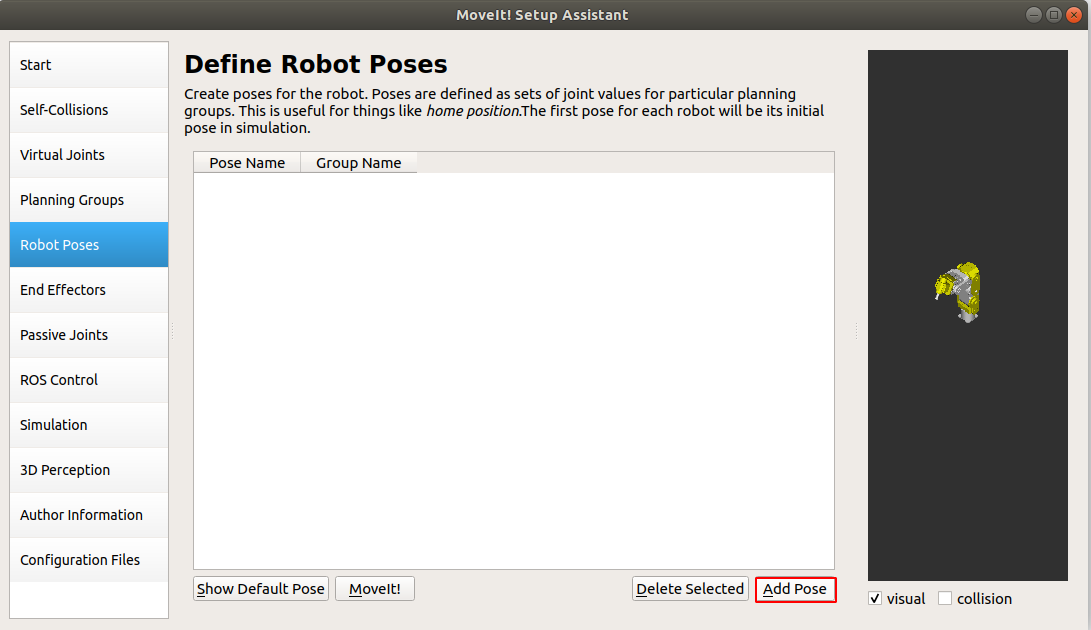
然后点击Add Pose,得到如下图所示画面,进行配置。
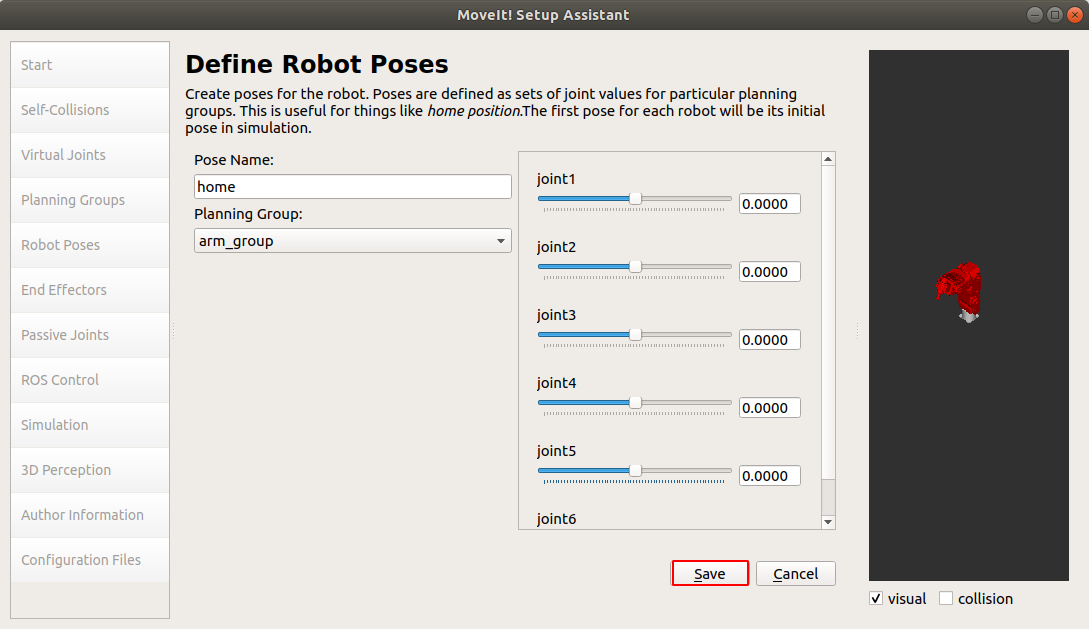
如此,配置了一个home点,后面在rviz软件中,可以直接调用该点,可根据自己需要配置自己想要的点位,然后点击Save。
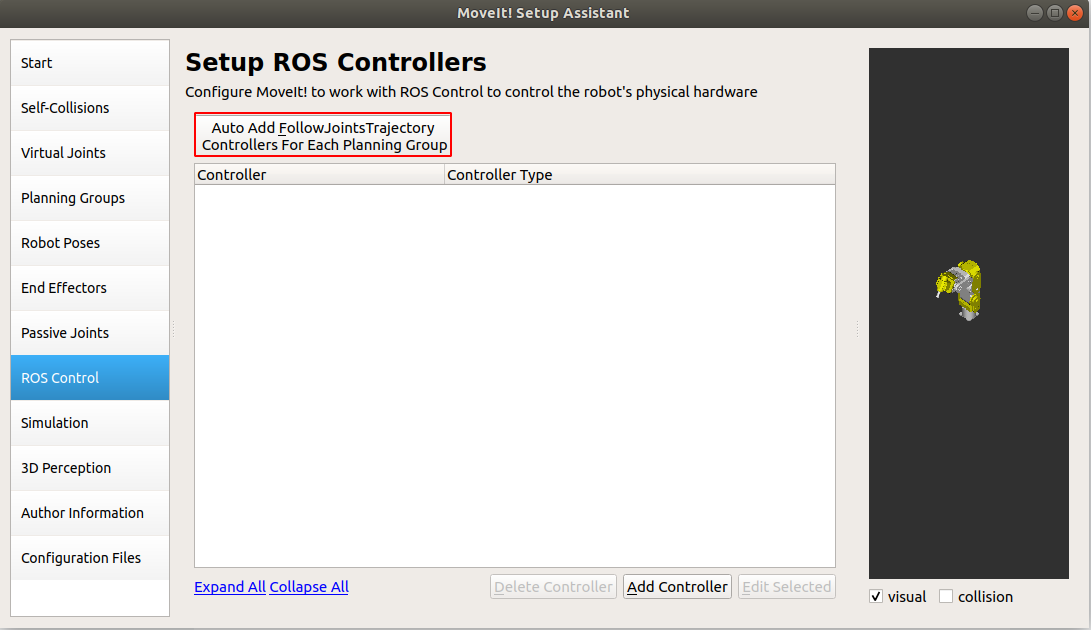
如果由End Effectors、Passive Joints也可进行相关配置,本示例中无,不再进行配置,然后点击ROS Control按如下图进行配置。
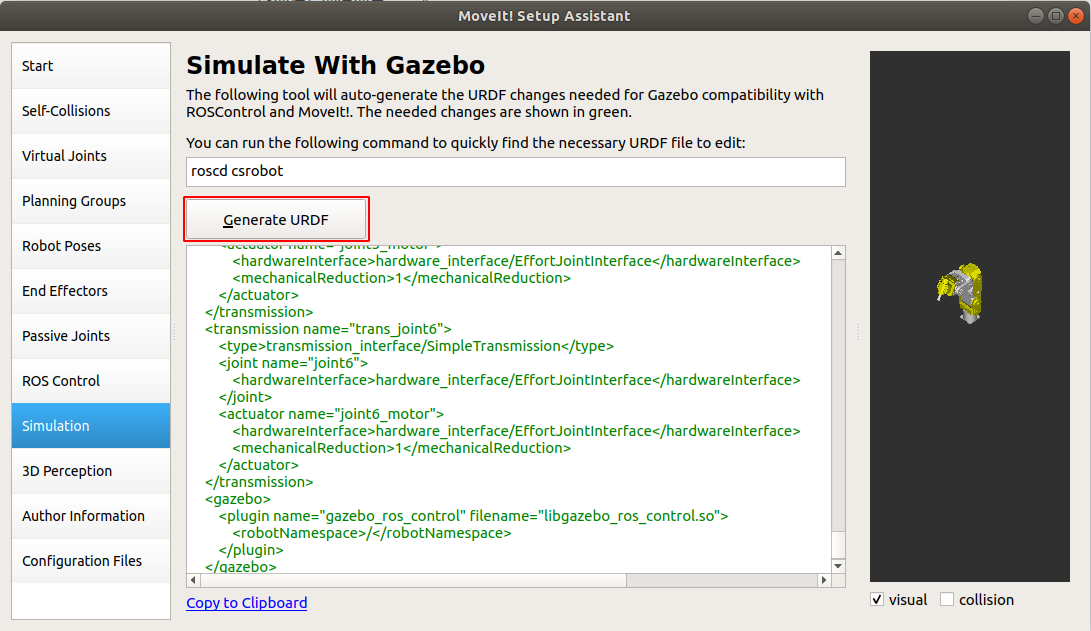
完成以上步骤后,点击Simulation,得到如下图所示界面,并点击Generrate URDF。
3D Perception本例中也暂未涉及。然后就是配置作者信息,输入自己的信息即可,这里不再示例,但一定要填写,否则无法生成功能包。最后就是Configuration Files,如下图所示。
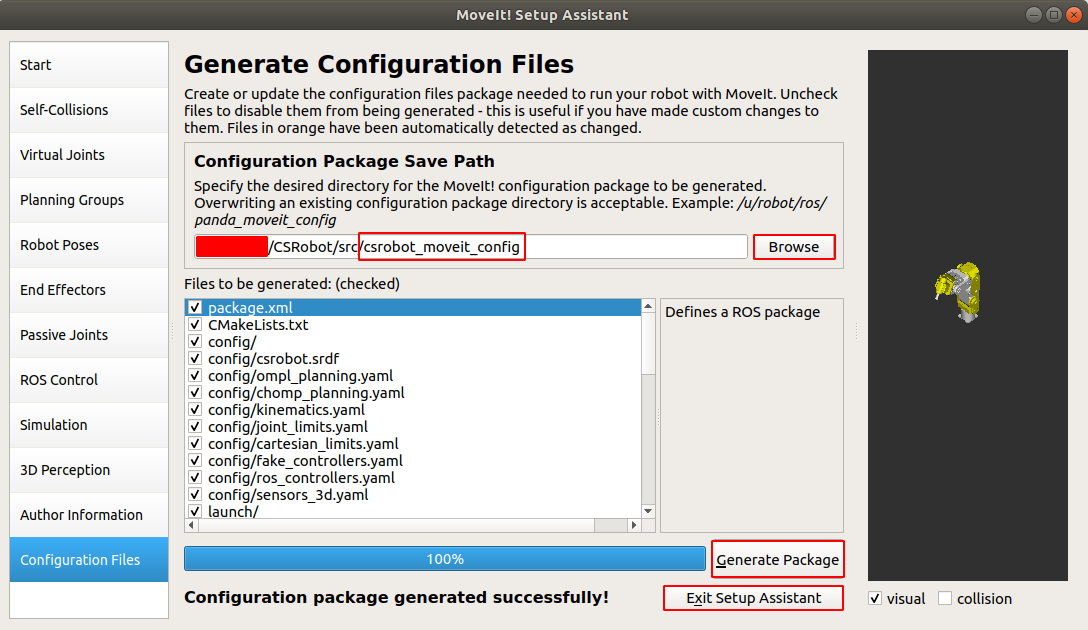
点击Browse选择上一篇所创建工作空间src文件夹下,创建一个名为“上一篇所生成功能包”_moveit_config的文件夹,然后点击Generate Package,生成成功之后,点击Exit Setup Assistant。
二、运行配置后的功能包
生成相应的功能包后,在终端输入如下指令,即可实现对自己的模型的控制。
roslaunch csrobot_moveit_config demo.launch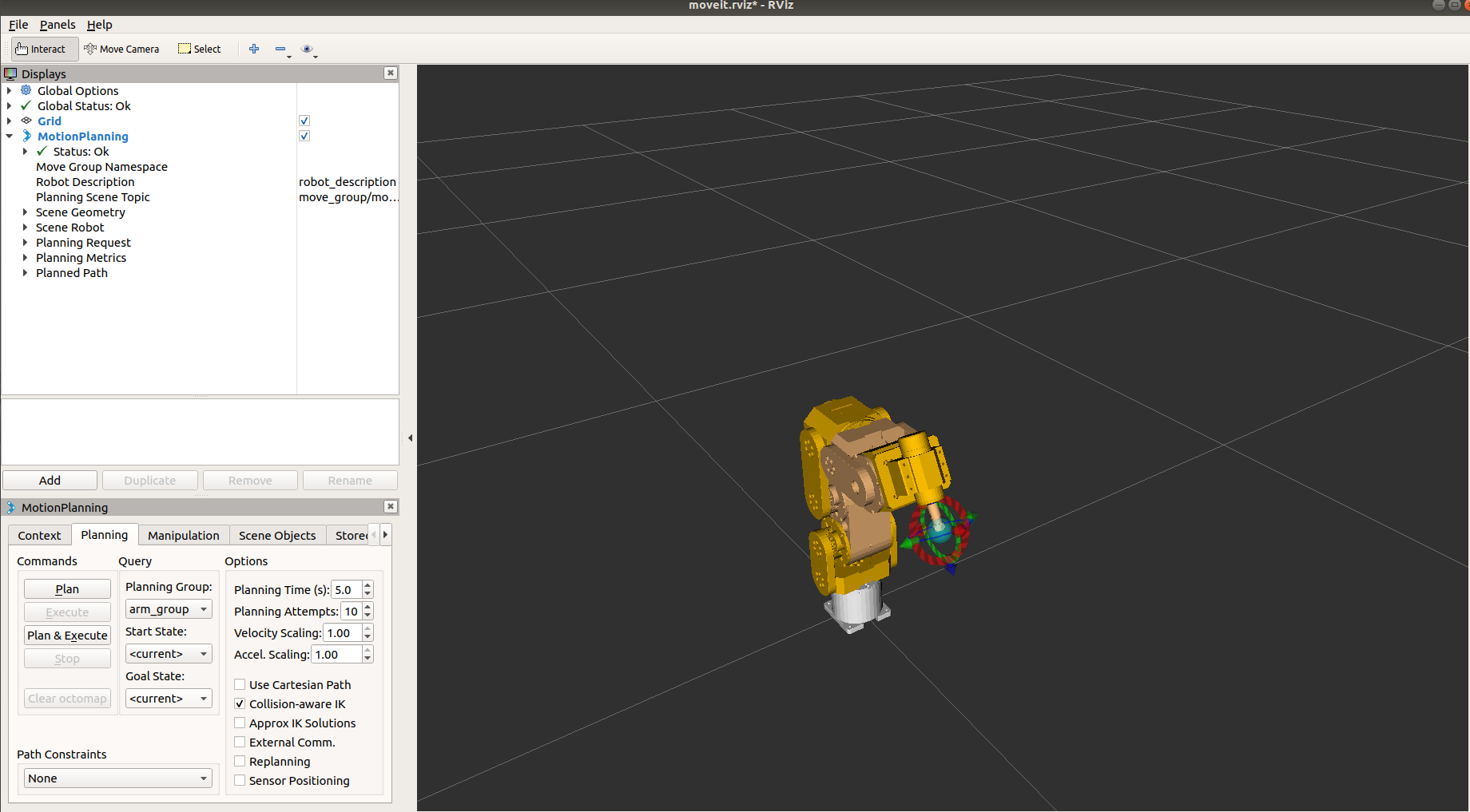
根据左侧的MotionPlanning模块可选择起始点位、目标点位(可拖动机械臂末端的蓝色小球进行选择)进行规划(plan),然后点击Excute进行真实的执行,也可以直接选择plan&Excute进行规划并执行。然后显示效果可在Dsiplay菜单中进行相关设置,入轨迹、是否循环执行等等。
最后
以上就是呆萌彩虹最近收集整理的关于ros melodic控制真实机械臂之moveit_setup_assistant配置一、通过moveit_setup_assistant进行配置二、运行配置后的功能包的全部内容,更多相关ros内容请搜索靠谱客的其他文章。








发表评论 取消回复