机器人数值解逆解
- 参考文献
- 逆运动学算法
- J A − 1 textbf{J}_A^{-1} JA−1的求法
- 注意
参考文献
- 《机器人学建模、规划与控制》 西安交通大学出版社(翻译的很差!公式有很多错误!建议参考原版)
- Robotics_Modelling Planning and Control Springer
- MATLAB机器人工具箱中机器人逆解是如何求出来的
逆运动学算法
末端执行器位置和方向的期望值和实际值之间的操作空间误差。令
e
=
x
d
−
x
e
textbf{e}=textbf{x}_d-textbf{x}_e
e=xd−xe
表示这种误差,对时间求导
e
˙
=
x
˙
d
−
x
˙
e
dot{textbf{e}}=dot{textbf{x}}_d-dot{textbf{x}}_e
e˙=x˙d−x˙e
根据微分运动学,上式可以写成
e
˙
=
x
˙
d
−
J
A
(
q
)
q
˙
dot{textbf{e}}=dot{textbf{x}}_d-textbf{J}_A(textbf{q})dot{textbf{q}}
e˙=x˙d−JA(q)q˙
在矩阵
J
A
textbf{J}_A
JA为非奇异矩阵的假定下(当其为奇异矩阵的情况下只能用SVD方法求其“伪逆”),选择
q
˙
=
J
A
−
1
(
q
)
(
x
˙
d
+
Ke
)
dot{textbf{q}}=textbf{J}_A^{-1}(textbf{q})(dot{textbf{x}}_d+textbf{K}textbf{e})
q˙=JA−1(q)(x˙d+Ke)
得到等价的线性系统
e
˙
+
Ke
=
0
dot{textbf{e}}+textbf{K}textbf{e}=textbf{0}
e˙+Ke=0
其中系统的稳定与否取决于
K
textbf{K}
K(通常为对角矩阵),一般的其对角元素的范围是
[
0
,
1
/
(
采
样
时
间
)
]
[0,1/(采样时间)]
[0,1/(采样时间)]。控制框图如下:
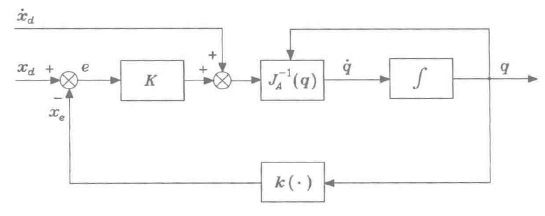
其中
k
(
.
)
textbf{k}(.)
k(.)是正运动学。
J A − 1 textbf{J}_A^{-1} JA−1的求法
一般的 J A textbf{J}_A JA不为方阵,因此只能求出 J A textbf{J}_A JA的伪逆
注意
在这种迭代求解的情况下需要注意奇异位置!
最后
以上就是义气月饼最近收集整理的关于【机器人学】机械臂数值解逆解参考文献逆运动学算法注意的全部内容,更多相关【机器人学】机械臂数值解逆解参考文献逆运动学算法注意内容请搜索靠谱客的其他文章。








发表评论 取消回复