对机械臂的工作的空间
参考:
John J. Craig《机器人学导论》
《Springer Handbook of Robotics》
工作空间是操作臂末端执行器能够到达的区域,若要求逆运动学解存在,则被指定的目标点必须在工作空间内。在这里说说对机械臂两种工作空间定义的理解。
可达工作空间
至少从一个方向可以到达的空间,这个较容易理解,就是可以放置末端执行器的点的总位置。
灵巧工作空间
机器人末端执行器能够从各个方向到达的空间区域,在这个点上,可以以任意的姿态摆放机械臂。
这样灵巧的工作空间只在某些理想的几何体上存在,具有关节限制的实际工业机器手几乎不拥有灵巧工作空间。
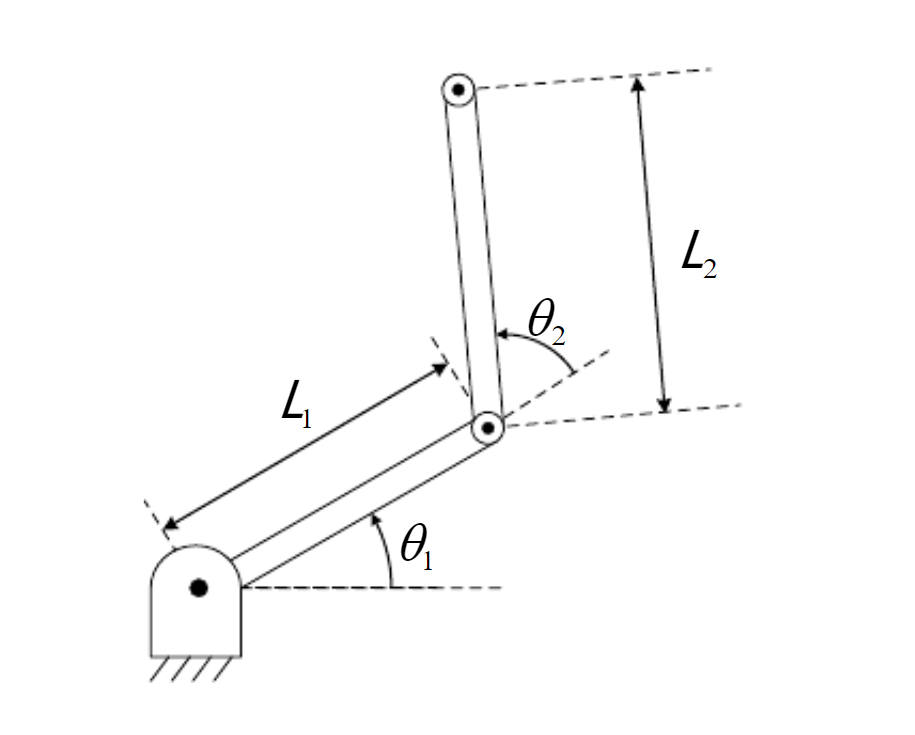
如图,假设两连杆的所有关节能旋转360°(二维),这种情况在实际机构中很少见。
如果L1 = L2, 那么灵巧工作空间只有原点处单独的一个点,可达工作空间是半径为L1+L2的圆;
如果L1≠L2,就不存在灵巧工作空间,可达工作空间是外径为L1+L2,内径为 |L1-L2| 的圆环。
不难看出来灵巧工作空间是可达工作空间的子集
最后
以上就是发嗲板凳最近收集整理的关于机械臂的两种工作空间理解的全部内容,更多相关机械臂内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复