四旋翼飞行器12——飞控接收机的三种接收模式
文章目录
- 四旋翼飞行器12——飞控接收机的三种接收模式
- 一、PWM型
- 二、PPM型
- 三、SBUS
无线遥控就是利用高频无线电波实现对模型的控制。如天地飞的的6通道2.4 GHz遥控器,一套200多块,具有自动跳频抗干扰能力,从理论上讲可以让上百人在同一场地同时遥控自己的模型而不会相互干扰。而且在遥控距离方面也颇具优势,2.4 GHz遥控系统的功率仅仅在100 mW以下,而它的遥控距离可以达到1km以上。
在这里我们用到了遥控器,既然有发射方,就会有接收方,那么接收机的原理是什么呢?
先来看看遥控器发射机与接收机原理图;
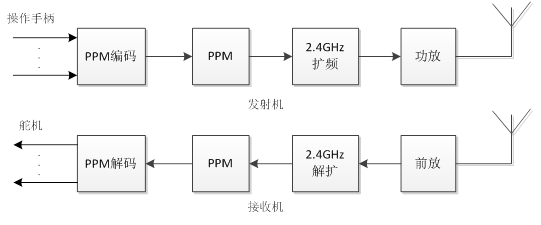
注意:上图是我从网上找的,PPM解码后面不一定控制舵机,这里这个图应该是固定翼飞机的,固定翼飞机上有舵机(主要控制的就是舵机),而四旋翼飞机应该是控制无刷电机。
而无人机飞控的接收机按照信息编解码的不同,主要分成三种型号。分别是SBUS、PPM、PWM型接收机。
那么SBUS、PPM、PWM到底是什么呢?
相信这个问题是每个未来的工程师在新入无人机坑时都会遇到的问题,也仍然在困扰着不少新手。这里简单对比解释一下,希望对朋友们有帮助。
PWM, PPM(也叫CPPM),基本上可以理解为两者是同一个东西, SBUS是接收机与其他设备通信的协议。请注意这里不要和遥控器和接收机之间的协议混淆。遥控器和接收机之间会采用某种协议来互相沟通,这些协议往往各个厂牌各自有一套且互不兼容。但接收机输出的信号是有通行标准的,我们这里讨论的就是接收机输出的信号。
一、PWM型
PWM相信大家肯定是非常熟悉了。
PWM ,Pulse Width Modulation 的缩写,英文意思是脉宽调制,在日常生活中主要用于电机、舵机的控制。这是一种古老而通用的工业信号,是一种最常见的控制信号。该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显
由于传输过程全部使用满电压传输,非0即1,很像数字信号, 所以他拥有了数字信号的抗干扰能力。
脉宽的调节是连续的,使得它能够传输模拟信号。
PWM信号的发生和采集都非常简单,现在的数字电路则使用计 数的方法产生和采集PWM信号。
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电 池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
PWM因为处理简单,在航模圈至今仍然广泛用以驱动舵机和固定翼飞机的电调等。其相对于PPM等协议最大的不同在于,它每条物理连线里只传输1路信号。换句话说,需要传输几个通道,就需要几组物理连线。
二、PPM型
全称是Pulse Position Modulation。
因为PWM每路只能传输一路信号,在分别直接驱动不同设备的时候(比如固定翼,每路各自驱动不同的舵机和电调)这没有任何问题。但在一些场合,我们并不需要直接驱动设备,而是需要先集中获取接收机的多个通道的值,再做其他用途时,比如将两个遥控器之间连接起来的教练模式,比如遥控器接电脑玩模拟器,当然还有我们玩多轴,要将接收机的信号传输给飞控时,每个通道一组物理连线的方式就显得非常的繁琐和没有必要。这时候PPM就是救星了。
航模使用的PWM信号,高电平的持续时间在整个时间轴上所占的空间其实是很小的(假设高电平是信号),绝大部分的时间都是空白的。PPM简单的将多个通道的数值一个接一个合并进一个通道,用2个高电平之间的宽度来表示一个通道的值。
每个通道信号脉宽0——2ms,变化范围为1——2ms之间。1帧PPM信号长度为20ms,理论上最多可以有10个通道,但是同步脉冲也需要时间,模型遥控器最多9个通道

注:上图为发射PPM,接收信号高低电平与发射相反。
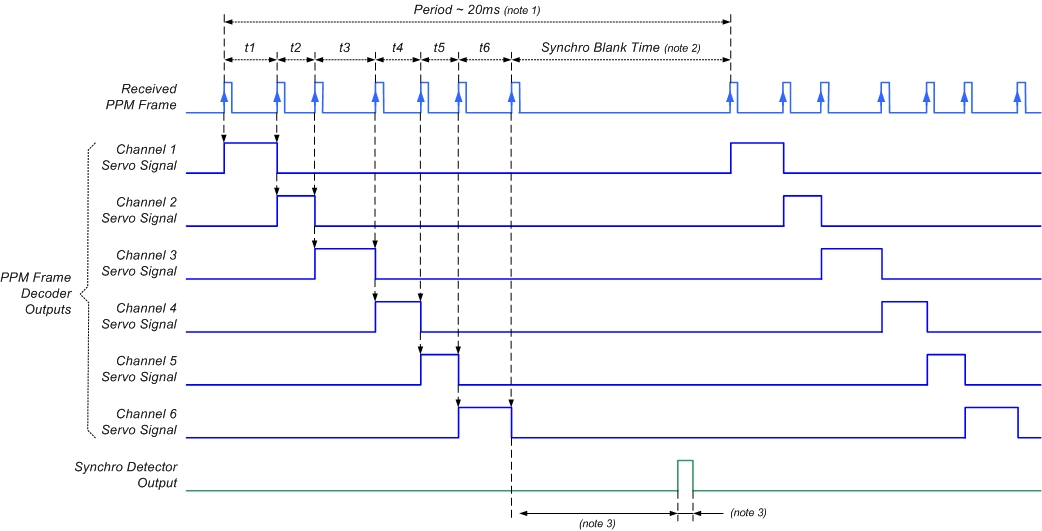
类似于舵机的控制,每一帧为20ms,再将20ms划分为每2ms一小帧,则一共有10个小帧,也即10个channel。但由于需要加入同步帧,则最多有9个channel。
每一channel有2ms,这2ms由固定的0.5ms再加上可调节的0.5ms~1.5ms构成。
参考文章:https://blog.csdn.net/yibu_refresh/article/details/45752131
https://blog.csdn.net/arris1992/article/details/80896718?utm_source=blogxgwz0 (有程序讲解)
三、SBUS
全称是Serial Bus。
S.BUS是一个串行通信协议,最早由日本厂商FUTABA(扶他爸~)引入,随后FrSky的很多接收机也开始支持,S.BUS是全数字化接口总线,数字化是指的该协议使用现有数字通信接口作为通信的硬件协议,使用专用的软件协议,这使得该设备非常适合在单片机系统中使用,也就是说适合与飞控连接。这也就是我为什么要将这个协议详细叙述的原因。总线是指他可以连接多个设备,这些设备通过一个Hub与这个总线相连,得到各自的控制信息。
S.bus使用RS232C串口的硬件协议作为自己的硬件运行基础。 使用TTL电平,即3.3V。 使用负逻辑,即低电平为“1”,高电平为“0”。 波特率:100000(100k),注意:不兼容波特率115200。
最后
以上就是可靠缘分最近收集整理的关于四旋翼飞行器12——飞控接收机的三种接收模式一、PWM型二、PPM型三、SBUS的全部内容,更多相关四旋翼飞行器12——飞控接收机内容请搜索靠谱客的其他文章。








发表评论 取消回复