更多交流欢迎关注作者抖音号:81849645041
目的
了解无人机电调、电机转速、旋翼拉力与油门给定信号之间的关系,可以通过相关设备进行拉力测试。
实验原理
飞机旋翼绕旋翼旋转轴旋转时,每个叶片的工作类同与一个机翼。旋翼的截面形状是一个翼型,旋翼弦线与垂直于桨毂旋转轴平面之间的夹角称为桨距。叶片在高速旋转时,会产生升力,牛顿定律和伯努利定律都可以解释。被叶片推动的空气,必须遵守动量守恒定律。
最接近叶片的空气受附壁效应(Coanda Effect)而紧贴着叶片的上表面流动,受叶片的上表面的形状,以及叶片桨距的影响,叶片上方的空气会加速向下,于是反作用力将旋翼向上提升。根据伯努利定律-流体对周围的物质产生的压力与流体的相对速度成反比,因此上表面的空气施加给旋翼的力小于下表面空气施加给旋翼的力,所以合力向上,也就产生了升力。
旋翼开始旋转后,就产生升力,随着旋翼速度的增加,升力逐渐增大。当升力超过重力时,飞机即垂直上升,若升力与重力相等,则悬停在空中,若小于重力,则向下降落。
旋翼所产生的拉力不仅取决于旋翼的转速,而且取决于桨叶的桨距。从原理上讲,调节转速和桨距都可以调节拉力的大小。

一、拉力测量原理
在弹性限度以内,物体受外力的作用而产生的形变与所受的外力成正比。形变随力作用的方向不同而异,使物体延伸的力称“拉力”或“张力”。(推力、拉力、提力、压力、浮力统称为:拉力)
弹性体(弹性元件,敏感梁)在拉力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),再将电信号转化为拉力值。
二、转速测量原理
转速是用单位时间内的转数表示的,通常采用1min内的转数作为单位,符号为r/min。
测试转速的方法很多,根据其工作原理,可分为计数式、模拟式和同步式三大类。计数式方法是用某种方法读出一定时间内的总转数;模拟式方法是测出由瞬时转速引起的某种物理量(如离心力、电机的输出电压)的变化;同步式方法是利用已知频率的闪光与旋转体的旋转同步来测试转速。根据转速转换方式的不同使用不同的方法。这里我们使用基于光电式的计数法来测量电机转速。
光电式开关它是利用桨叶对光束的遮挡或反射,由同步回路接通电路,从而检测桨叶对的有无。光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱对桨叶的有无进行探测。通过光电式开关可以得到一段时T分钟内桨叶旋转的次数N,根据桨叶的页数Y,可以利用以下公式得出转速S 。
![]()
步骤
安装设备
将电调电源接口接到一个电源T插公头上,电源为T头(若要更换电调,需进行这一步):
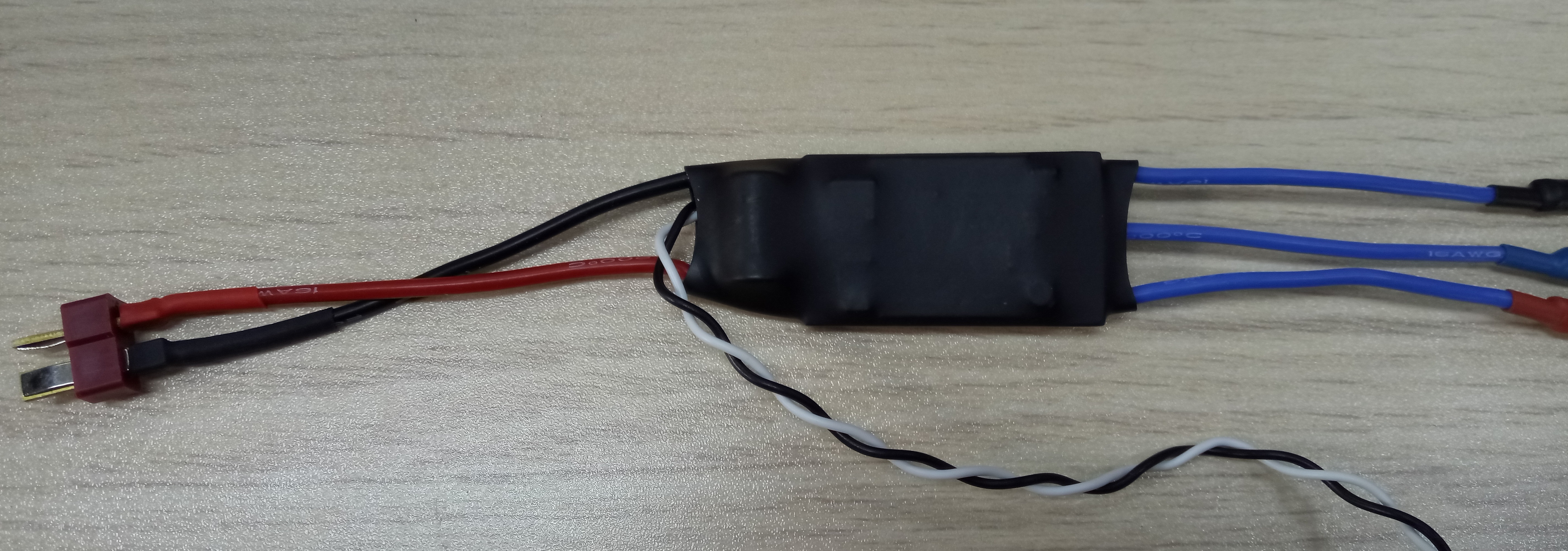
将电机(带桨叶)安装到夹具上,并将电机与电调连接(为确保电机转向正确,开始安装时电机与电调三根线可以随意连接,在进行实验时,若发现电机转向错误,交换其中任意两根线的连接即可)将电调信号线(白色信号线,黑色地线)与控制线相连:
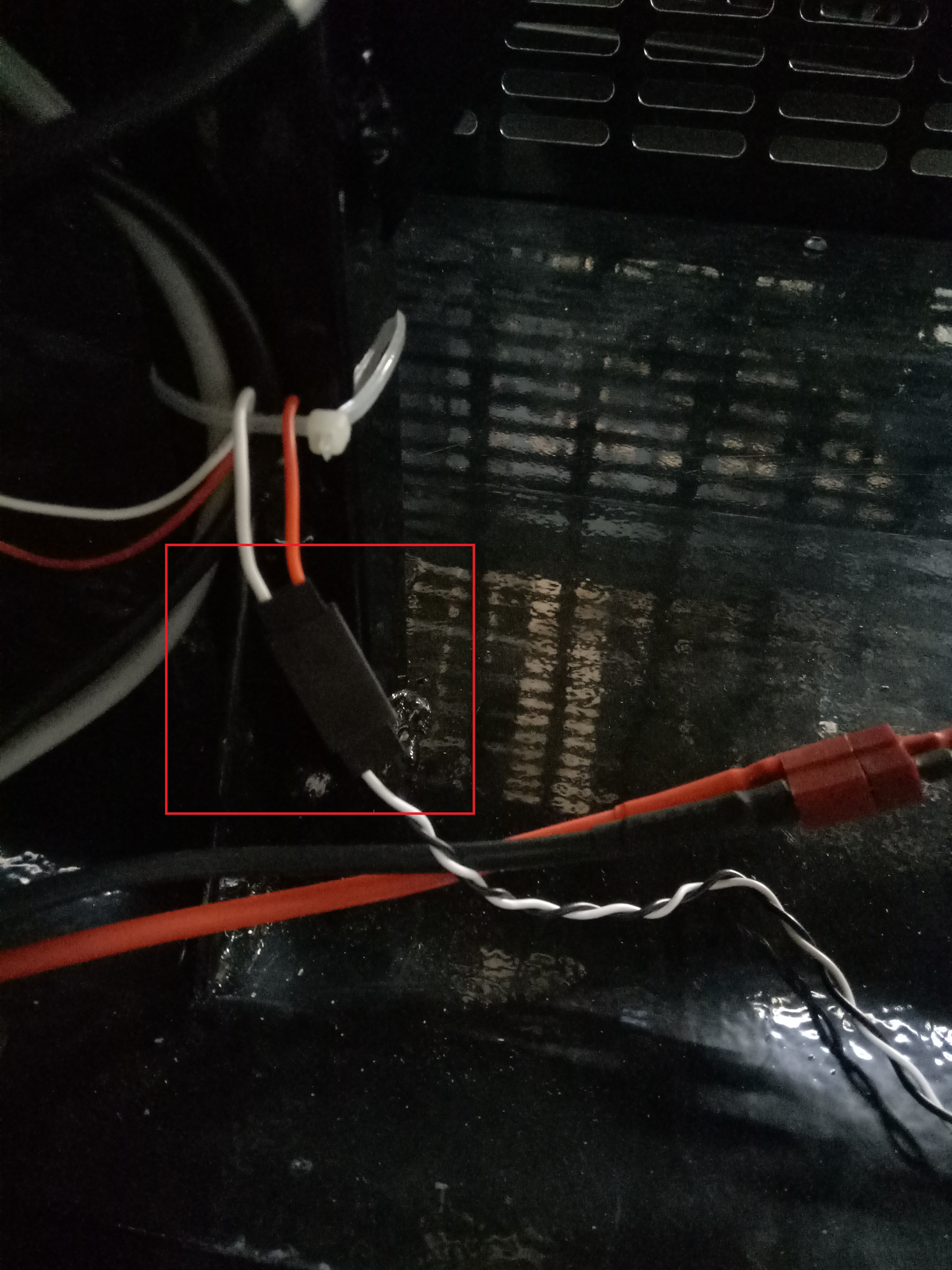
将电池放进电池盒,与电流计相连:

测量数据
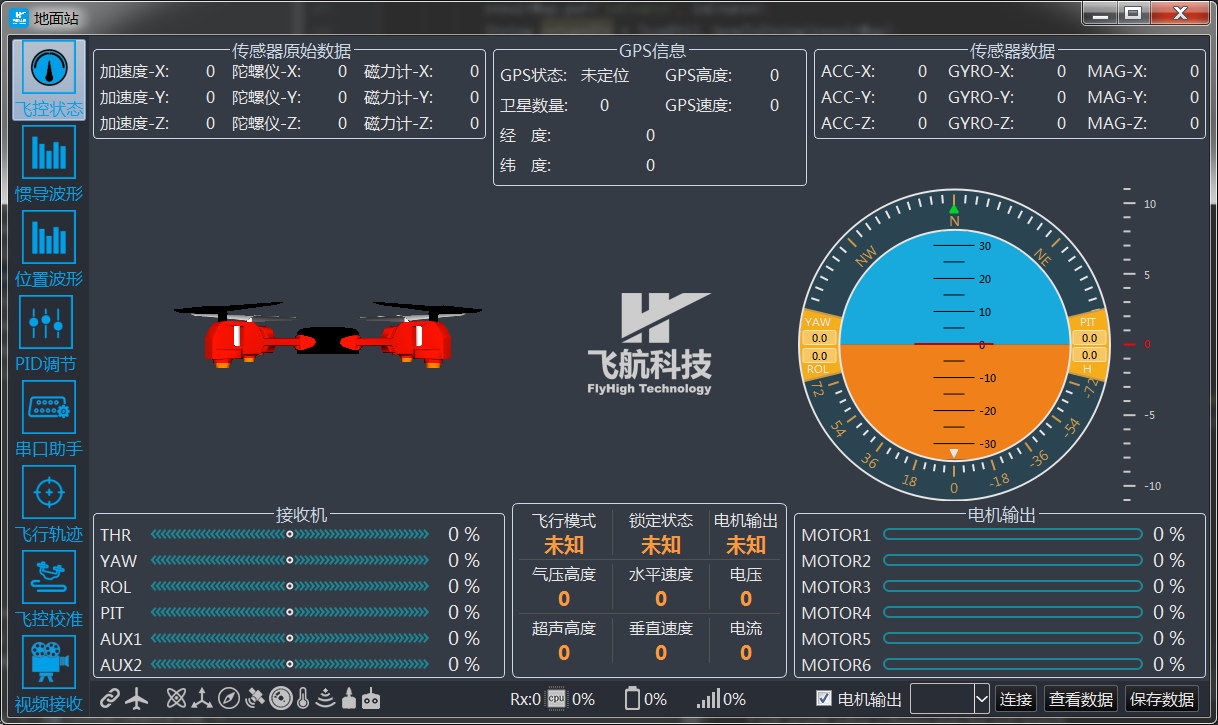
将设备背板的开关打开,将USB线从设备背板的USB端口连接到电脑的USB端口 。打开工控机上对应的软件(地面站):
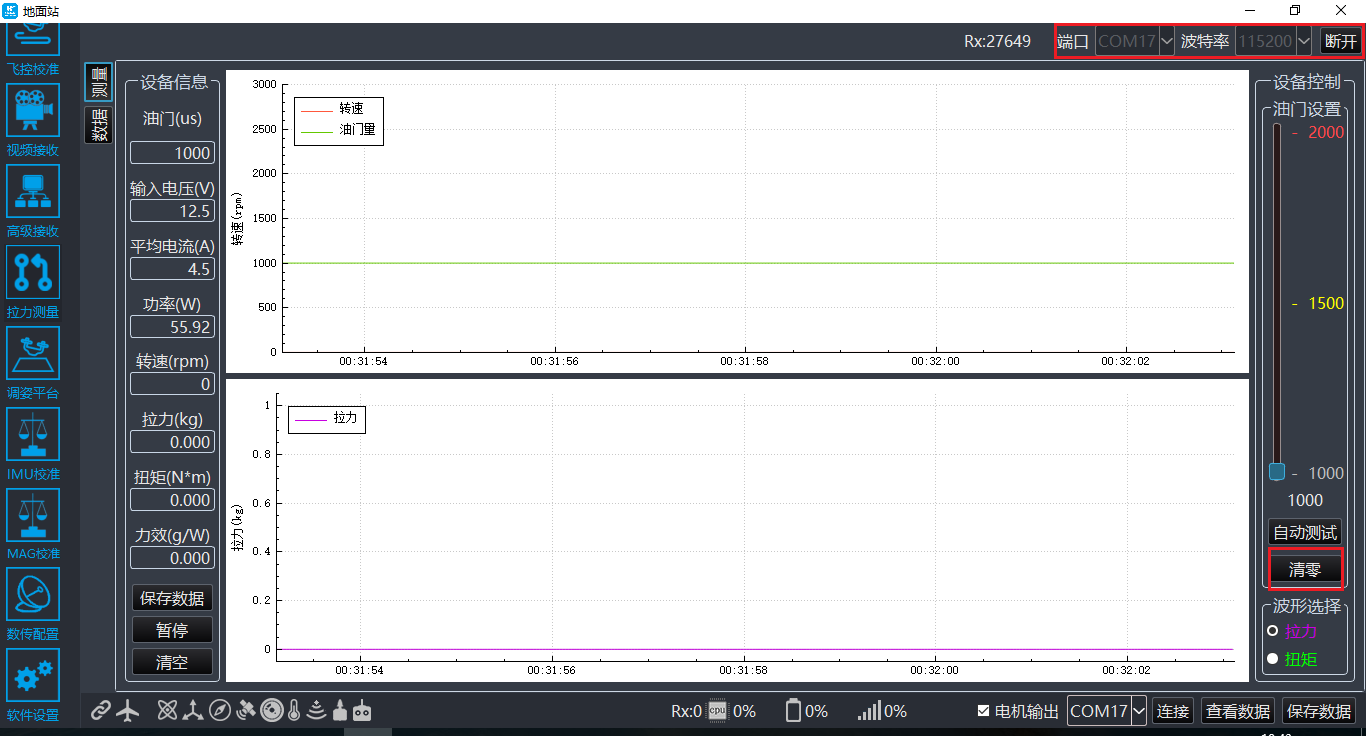
点击拉力测量,进入拉力测量界面,波形选择切换为拉力:
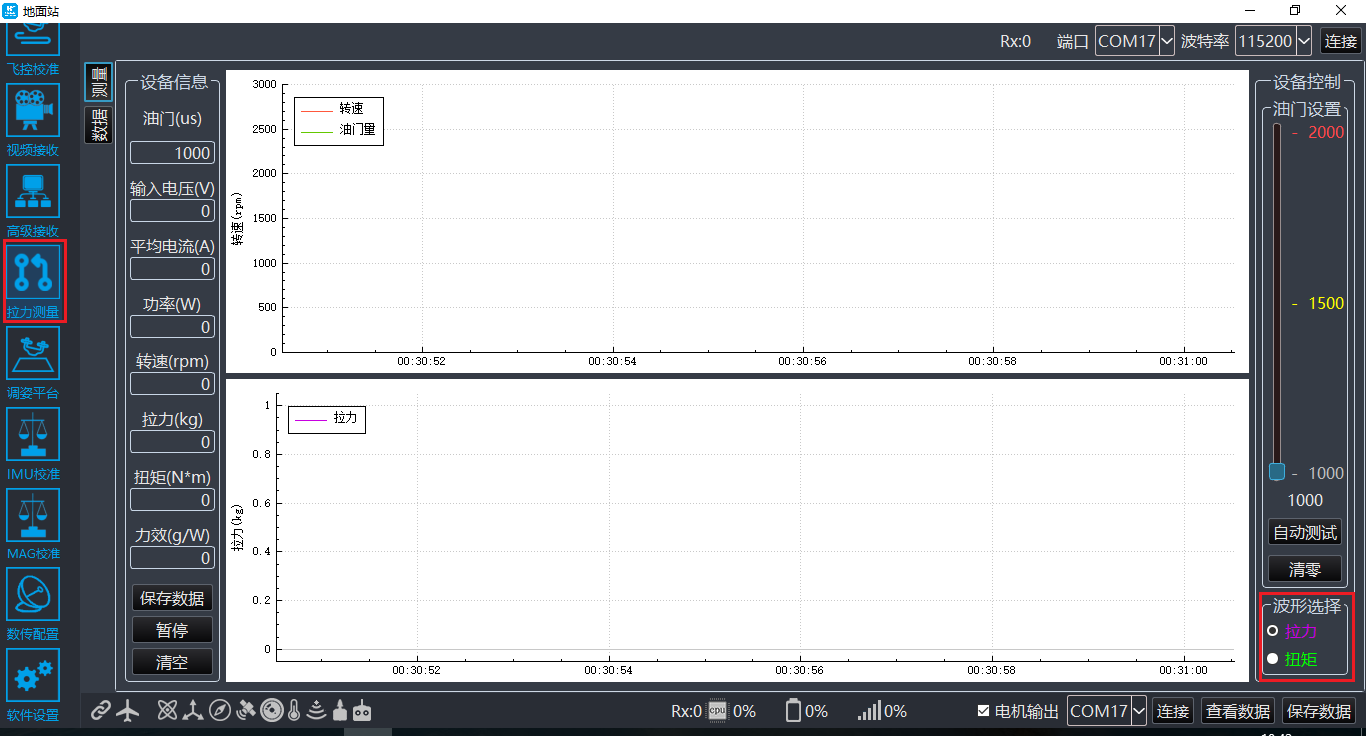
选中端口,设置波特率为115200,点击连接,在开始测试前电机清零,将拉力值清零:
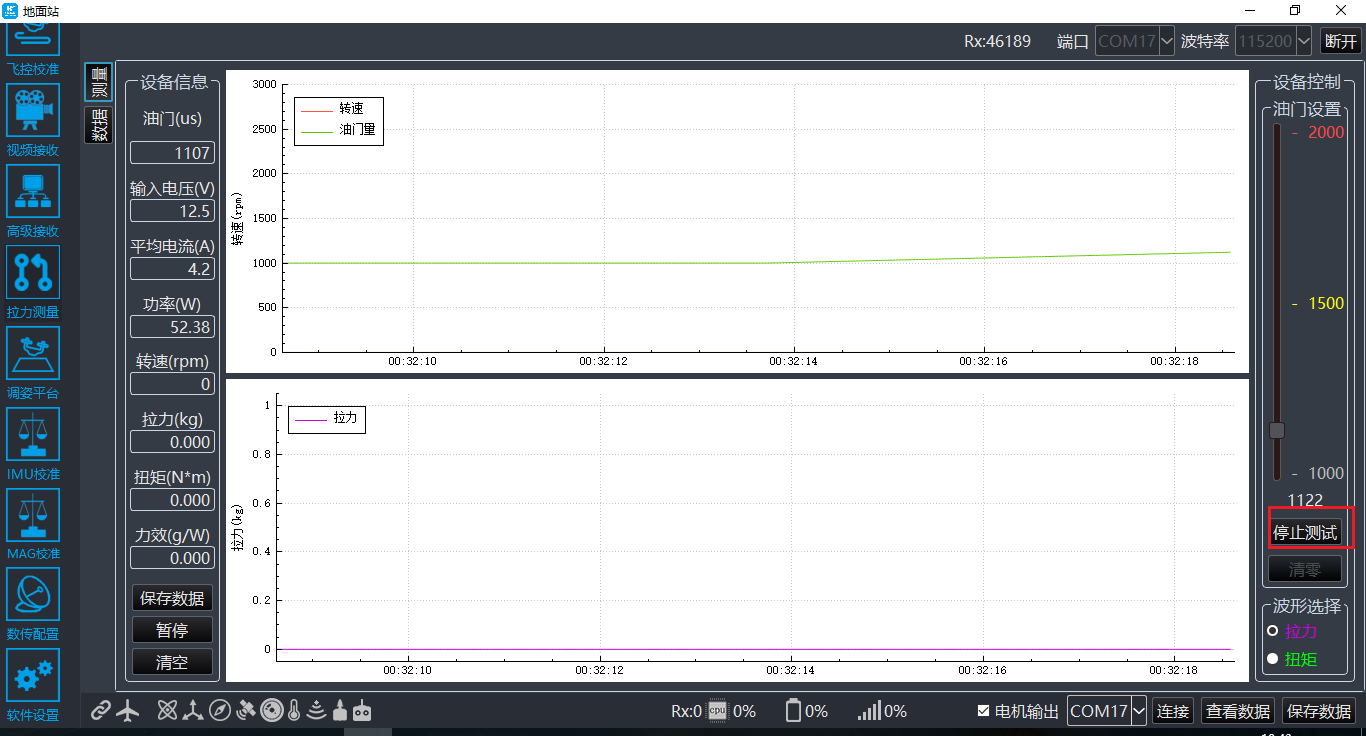
将油门拉倒1200的位置,看电机旋转方向是否有误,若有则将油门下拉到1000,断开电池与电调的连接,然后任意交换电机的三根线。
在电机旋转方向正确的情况下,点击自动测试:
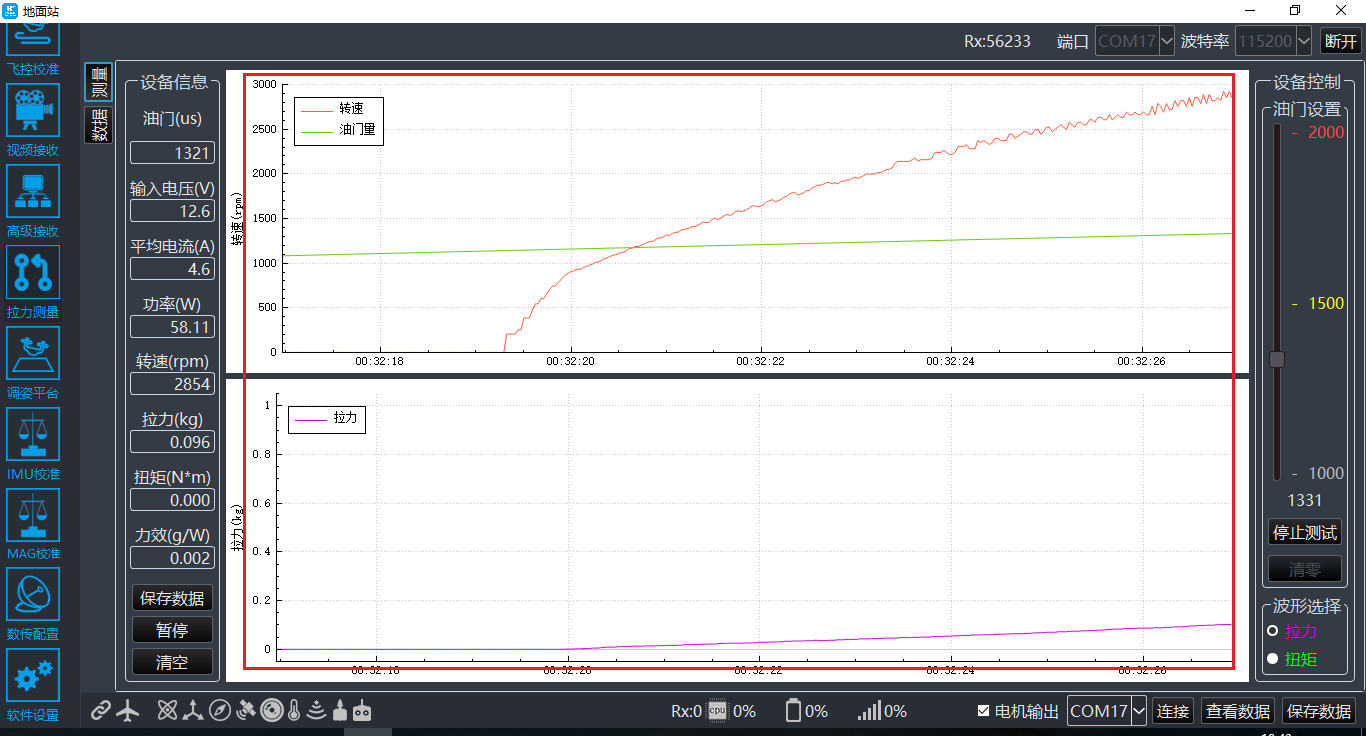
自动测试过程大约需要一分钟,波形图会显示实时转速、油门、拉力数据波形:
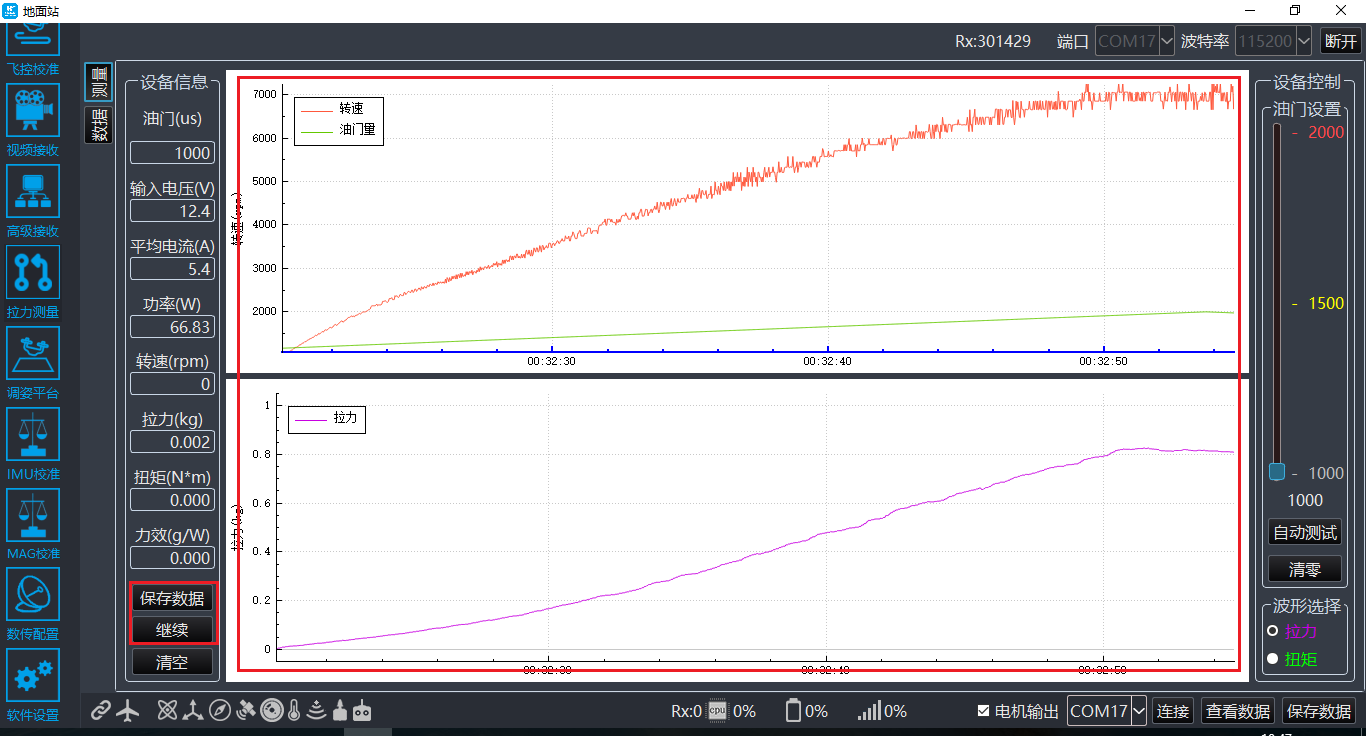
等待测试结束,点击暂停按钮,将波形图切换到暂停绘制状态,调整转速波形图(在波形图上拖动鼠标查看更多波形数据,滚动滚轮缩放波形数据,双击鼠标左键查看所有波形数据,双击鼠标右键调整Y轴数据全部显示,单击坐标轴后滚动滚轮对单一轴缩放),将一个上升周期完整显示,然后点击保存数据按钮保存数据:
数据分析
点击数据选项卡。然后点击打开数据按钮。选择刚刚保存的文件(文件修改时间最近的文件)。
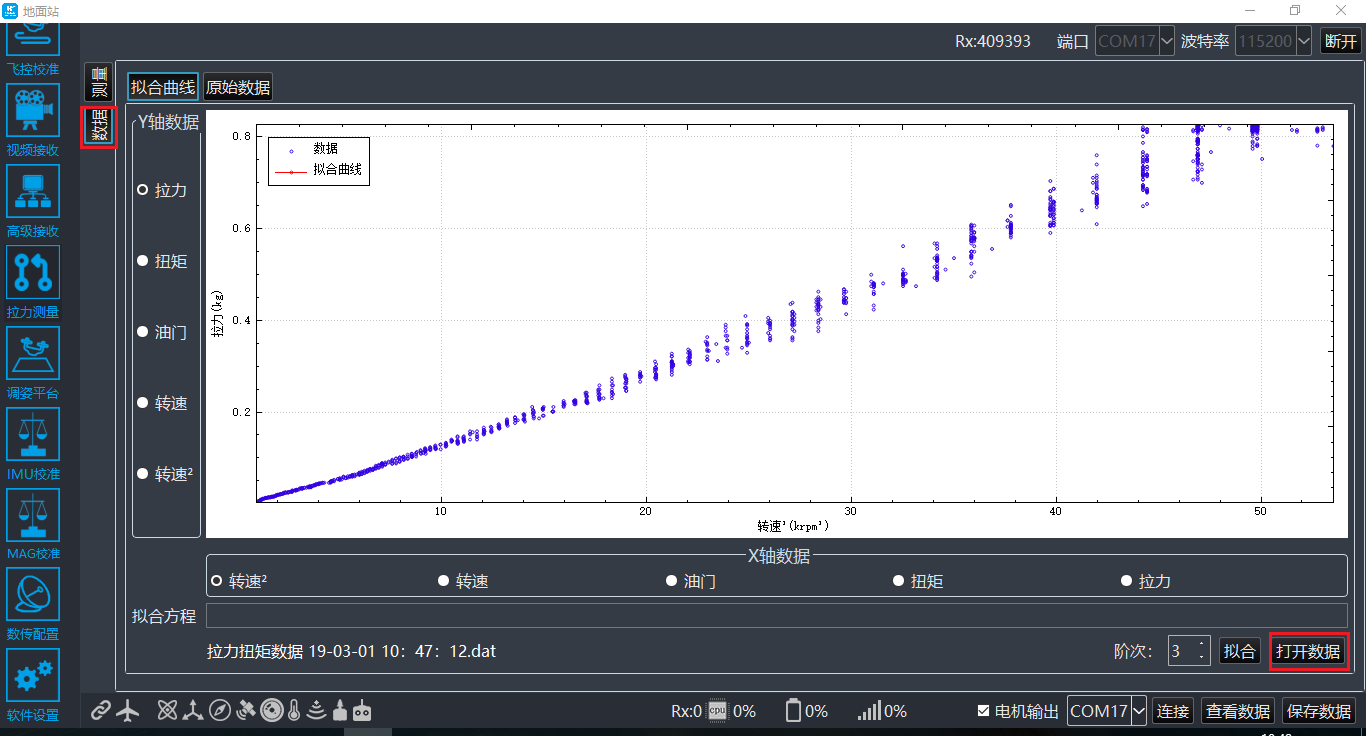
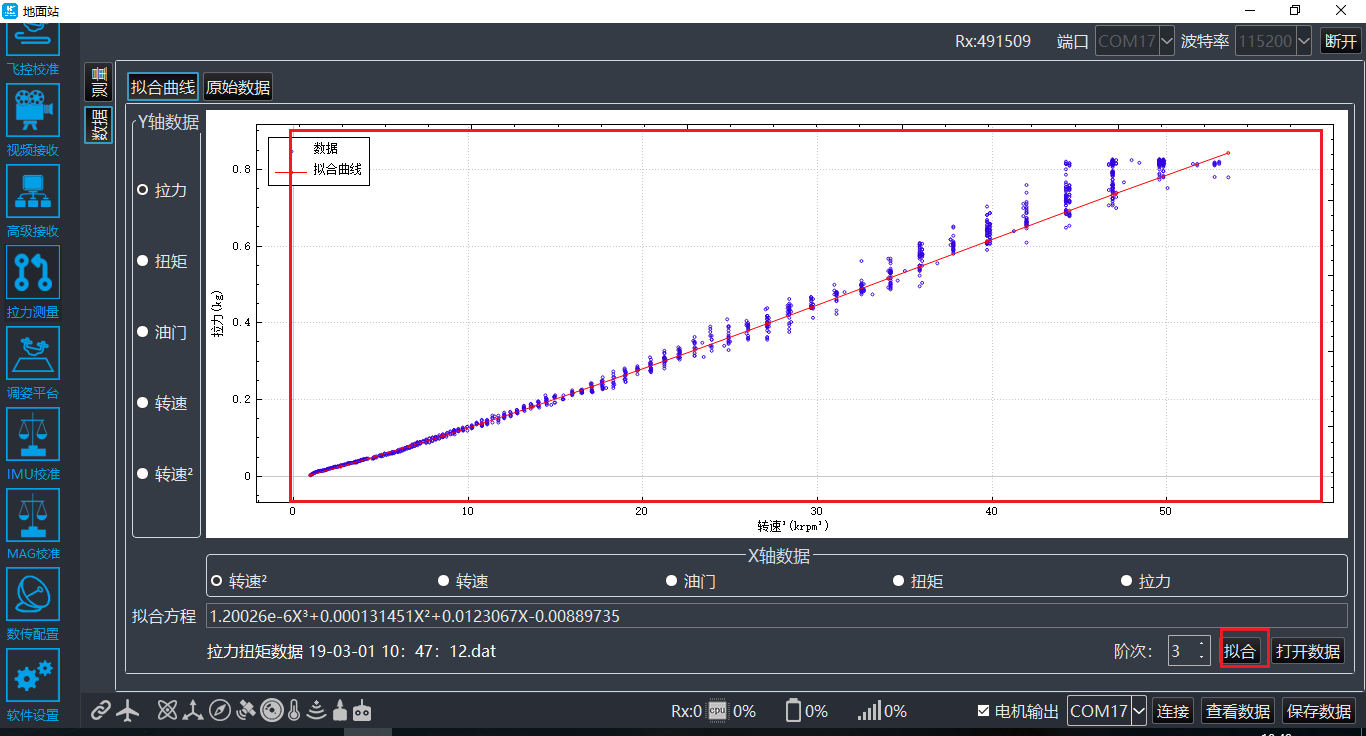
打开后再图表中会显示拉力数值,点击“拟合”生成拉力-转速的平方拟合曲线并输出拟合方程:
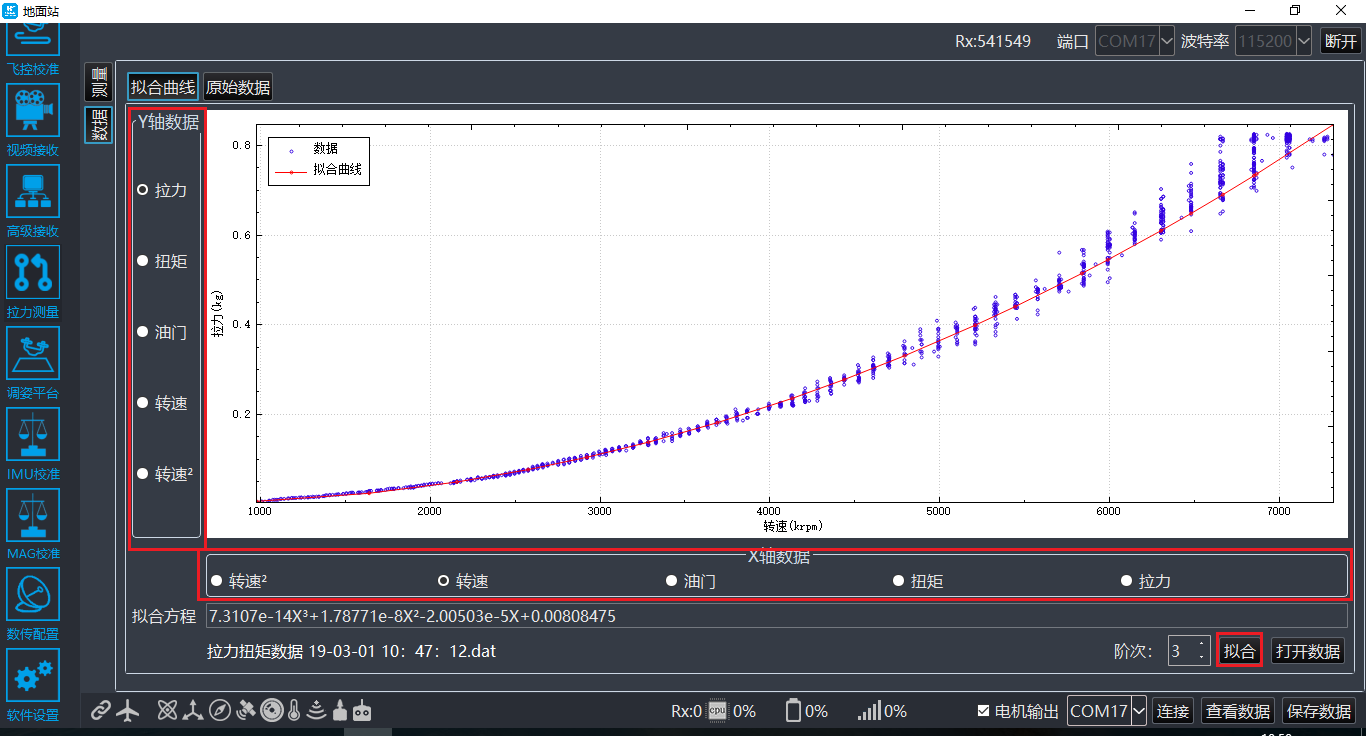
自由组合X、Y轴数据生成其它拟合曲线:
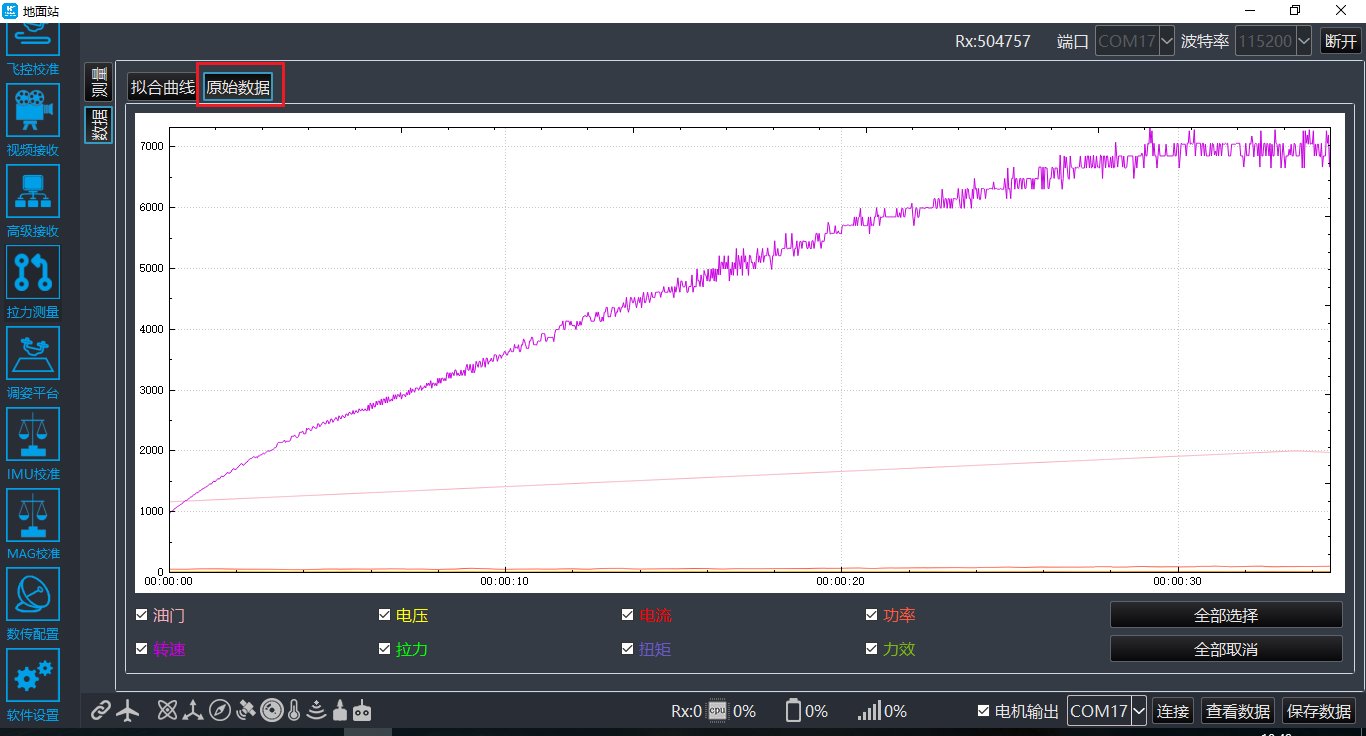
选择原始数据可查看当前打开的数据曲线波形:
最后
以上就是自觉小蚂蚁最近收集整理的关于STM32F4无人机动力旋翼拉力测试的全部内容,更多相关STM32F4无人机动力旋翼拉力测试内容请搜索靠谱客的其他文章。








发表评论 取消回复