单片机控制步进电机的速度有三种方式:一种是脉冲调制(PWM),另一种是脉位调制(PPM),还有一种时脉幅调制(PAM)。
但是步进电机最常用的调速方式是PWM调制方式,下面我就讲解下PWM,其它的两种可以上网查找资料了解。
首先PWM的用途有很多:测量,通信,功率控制与变换,电动机控制、伺服控制、调光、开关电源,甚至某些音频放大器等等,总之来说,PWM调试方式很重要。
PWM的原理:PWM 是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM 信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用 PWM 进行编码PWM的工作原理图:就是在改变一个周期内高低电平的时间。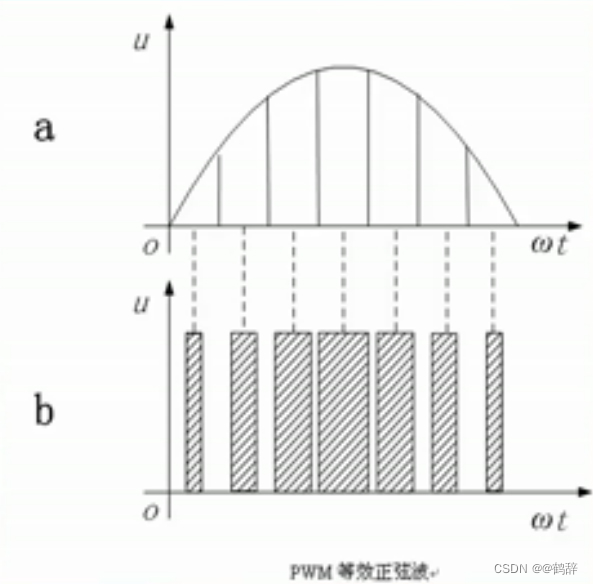
当然,步进电机也采用这种PWM方式代码如下:
void Timer0() interrupt 1 //在定时器内控通过按键控制;每按一次按键,i自加1,从而改变高电平的
{ static u16 count,count1; //时间count1的值
TH0=0xfc;
TL0=0x18;
count++;
if(count>=100)
{
count=0;
if(i==0) {count1=90;}
if(i==1) {count1=60;}
if(i==2) {count1=30;}
if(i==3) {count1=0;}
if(i>3) i=0;
}
if(count<=count1) Tim=1; else Tim=0;
完整的速度控制代码如下:
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit A = P1^0; //定义引脚
sbit b = P1^1;
sbit C = P1^2;
sbit D = P1^3;
void setmotor();
void motor_cs();
void Timer0Init();
void Delay10ms();
void key();
sbit key_1=P3^4;
u8 rate=0,i=0;
u8 motorstep=0; //步进电机步序
u16 Speed=1,Tim,CT;
#define speed 12;
void Timer0() interrupt 1
{ static u16 count,count1;
TH0=0xfc;
TL0=0x18;
count++;
if(count>=100)
{
count=0;
if(i==0) {count1=90;}
if(i==1) {count1=60;}
if(i==2) {count1=30;}
if(i==3) {count1=0;}
if(i>3) i=0;
}
if(count<=count1) Tim=1; else Tim=0;
}
int main()
{
Timer0Init();
motor_cs();
while(1)
{
key();
setmotor();
}
}
void motor_cs()
{
A=1;
b=1;
C=1;
D=1;
}
void setmotor()
{
switch(motorstep)
{
case 0: //a
if(Tim)
{
A=0;
b=1;
C=1;
D=1;
motorstep=1;
Tim=0;
}
break;
case 1: //ab
if(Tim)
{
A=0;
b=0;
C=1;
D=1;
motorstep=2;
Tim=0;
}
break;
case 2:
if(Tim)
{
A=1;
b=0;
C=1;
D=1;
motorstep=3;
Tim=0;
}
break;
case 3:
if(Tim)
{
A=1;
b=0;
C=0;
D=1;
motorstep=4;
Tim=0;
}
break;
case 4:
if(Tim)
{
A=1;
b=1;
C=0;
D=1;
motorstep=5;
Tim=0;
}
break;
case 5:
if(Tim)
{
A=1;
b=1;
C=0;
D=0;
motorstep=6;
Tim=0;
}
break;
case 6:
if(Tim)
{
A=1;
b=1;
C=1;
D=0;
motorstep=7;
Tim=0;
}
break;
case 7:
if(Tim)
{
A=0;
b=1;
C=1;
D=0;
motorstep=0;
Tim=0;
}
break;
}
}
void Timer0Init()
{
TMOD=TMOD|0X01;
TH0=0xfc;
TL0=0x18;
ET0=1;
EA=1;
TR0=1;
}
void key()
{
if(key_1==0)
{
Delay10ms();
if(key_1==0)
i++;
}
while(!key_1);
}
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 18;
j = 235;
do
{
while (--j);
} while (--i);
}最后
以上就是彩色飞机最近收集整理的关于单片机之步进电机速度控制篇(三)的全部内容,更多相关单片机之步进电机速度控制篇(三)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复